 Boyang Xing
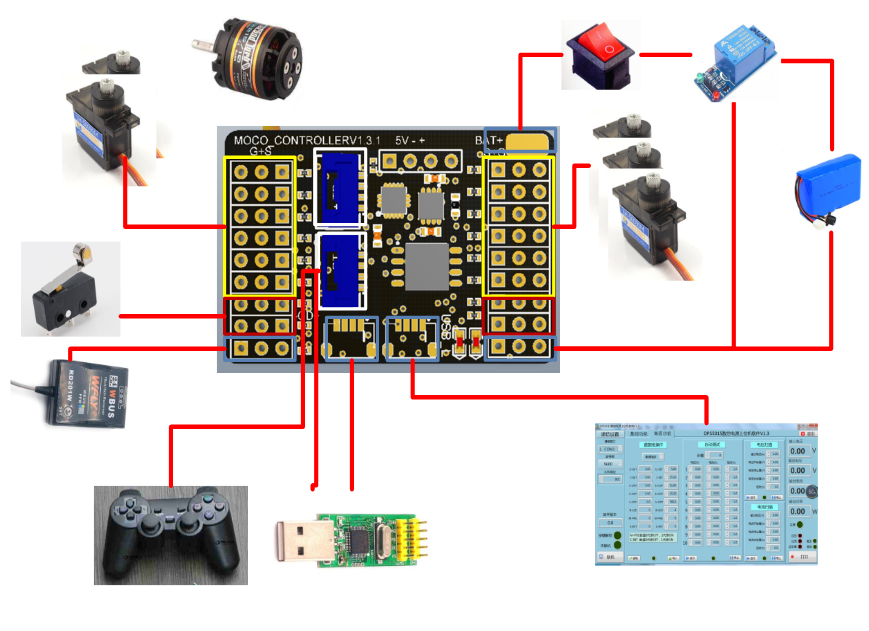
Boyang XingThe world's most exquisite scale-up model of quadruped robot Moco robot The electrical connection of the controller is shown in the following figure:controller is trying to break the current situation of lack of easy to use servo quadruped robot projects, hoping to surpass foreign geeks to create original algorithms and innovative playing methods. Compared with the other quadruped robot controller, it has the following major breakthroughs:
+Support robot wizard settings (users can configure robots through wizard)
+Support on-line angle calibration (users can adjust the deviation online to speed up the calibration of the steering gear)
+Support on-line parameter adjustment (users can adjust parameters on-line to adapt different size robots quickly)
+Support guided module testing (guided testing helps users quickly verify and optimize robot parameters)
+Support local saving of parameters (quick downloading of parameters to avoid loss)
The electrical connection of the controller is shown in the following figure:
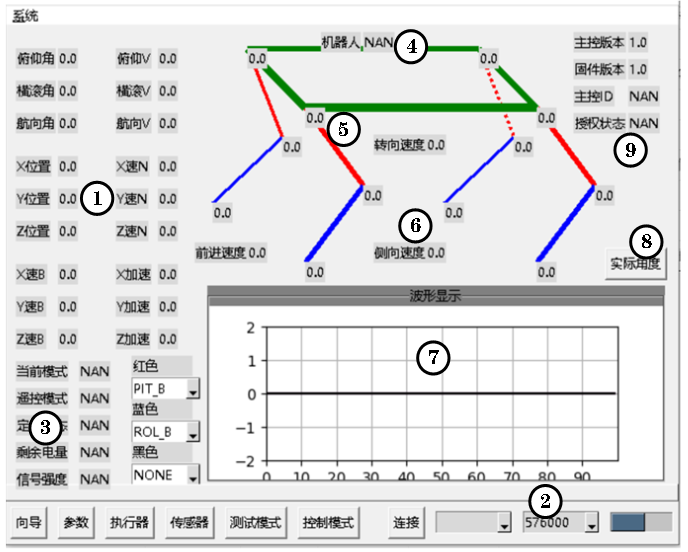
Moco general-purpose OCU upper computer is a cross platform software supporting Moco robot controller for rapid configuration and parameter adjustment. It can be deployed in windows and Ubuntu systems based on Python kernel. The upper computer supports the selection of robot configuration, which can quickly complete the establishment of Moco series quadruped robots. At the same time, it also supports the user to quickly customize the robot configuration parameters based on the robot configuration parameters. At the same time, the upper computer integrated parameter online adjustment function can quickly realize the parameter setting and has waveform display to provide visual indicators for the attitude control parameter setting. In order to facilitate the user to test the upper computer, the calibration interface for the output of the steering gear is provided. The user can quickly complete the angle deviation calibration and steering calibration. At the same time, perfect test steps are provided. After the robot calibration configuration is completed, the user can not only complete the fast debugging of the robot stability according to the test process, but also support the local storage and fast configuration parameters for the upper computer to save parameters Write, compared with the previous generation of code adjustment way greatly speed up the debugging of the robot!
 Graham Fleming
Graham Fleming
 Mo Badr
Mo Badr
 Avi
Avi 
 Andres
Andres