 Brian Brocken
Brian BrockenThis servo/gearbox is the new and improved version of my original gearbox design. The original one (project can be found here: https://hackaday.io/project/162855-3d-printable-high-torque-servogear-reduction) had a gear ratio of 30:1 and the speed of the output shaft was about 715 RPM which made it difficult to tune in the right PID parameters. This new version has a gear ratio of about 162:1 which lowers the speed of the output shaft to about 60RPM and increases the torque to around 297kg*cm.
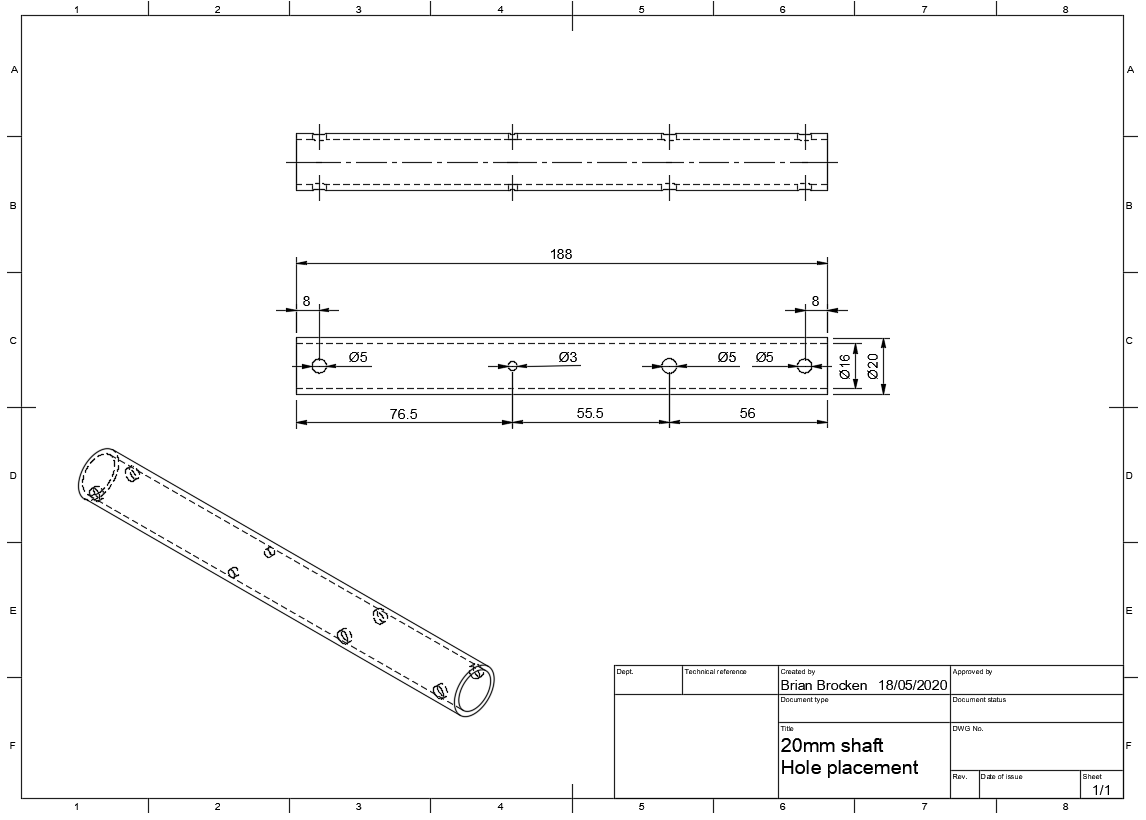
I choose to go for double helical gears on this one because they produce a lot less noise than regular spur gears and the forces on the teeth are transferred more gradually. The gears rotate around a 6mm stainless steel shaft which is lubricated with bearing grease. Ideally all the gears should have some bearings, this is being considered for the next moment because when the servo runs for a few moments the gears in the first stage can heat up pretty quick to around 30 degrees celsius. Unlike my previous design I used 2 20mm bearings to support the output shaft.
This servo was designed using Autodesk Fusion 360. I used these 2 plugins to create the bevel and double helical gears, one is 40 dollars but well worth it's money:
- https://apps.autodesk.com/FUSION/en/Detail/Index?id=2427789559362467821&appLang=en&os=Win64
- https://apps.autodesk.com/FUSION/en/Detail/Index?id=9029586664984391977&appLang=en&os=Win64
The servo uses a 775 36V 9000rpm brushed DC-motor which is driven by my Universal Motion Controller (UMC, project can be found here: https://hackaday.io/project/170604-umc-universal-motion-controller). The stall torque theoretically is about 297kg*cm, I was able to test the servo to a torque of about 132kg*cm.
During testing none of the gears broke, they were all printed in PLA with an Anet E12 and a Reprap Prusa I3. The weak link in this design however where the mounting tabs and the bevel gears used in the first stage on the motor shaft. These 2 gears in the first stage tend to slip under high loads ,like when i tried to pull the car forwards with it's handbrake on, but this didn't occur when i performed the test where it pulled 132kg*cm of torque so it should be fine to at least this torque rating.
Gears used to reach a 162:1 gear ratio:
- Gear 1: Bevel gear -> 15 teeth , Module 1
- Gear 2: Bevel / Double helical gear -> 60/13 teeth , Module 1 / 1.5
- Gear 3: Double helical gear -> 39/13 teeth , Module 1.5
- Gear 4: Double helical gear -> 39/13 teeth , Module 1.5
- Gear 5: Double helical gear -> 39/18 teeth , Module 1.5 / 2
- Gear 6: Double helical gear -> 27 teeth , Module 2
Additional parameters used:
- Gear type: radial system
- Helix angle: 30 deg
- Pressure angle: 20 deg
- Backlash: 0.2mm
STL and Fusion 360 source files can be found here: https://bbprojects.technology/collections/stl-fusion-360-source-files/products/3d-printable-high-torque-servo-gearbox-version-2-files
Video:







 Dongil Choi
Dongil Choi
 Silas Waxter
Silas Waxter
 Simon Merrett
Simon Merrett
I might print up two of these for use in a Satnogs Rotor.