 Adam Oakley
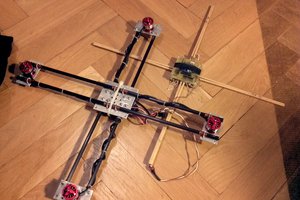
Adam OakleyWe designed and built a 100% 3D printed frame for the quadcopter. The plastic frame is strong and also quite light. To control the quadcopter, we use an Arduino Nano to read a PS2 controller. The controller data is then transmitted to the quadcopter using a pair of NRF24L01+ modules. A 2.4GHz camera sends video back to the pilot's receiver.
0%
0%
Wireless FPV Quadcopter
A quadcopter that streams live video back to the pilot. It's controlled with a PS2 controller.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 kevarek
kevarek
 Sam New
Sam New
 Frederico Sobreira
Frederico Sobreira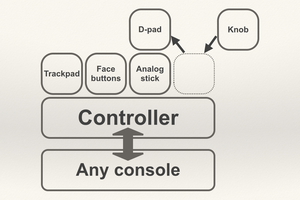
 PointyOintment
PointyOintment
guys can i remove spektrum dx6 dms module and use the nfl transmitter? Im stuck with a good dx6 with dms only and cant get a dms 6ch receiver, so Im thinking exchange it?
what range is the nfl good for? 100m? and will it connect to dms2 might be dsm lol dmsx flysky esky 2.4ghz? receivers? this controller locked to the stupid dms only. Please help.
Id also like to talk about parrot ar2.0 and apm2.6. I have multiple project quads. please get intouch.