0%
0%
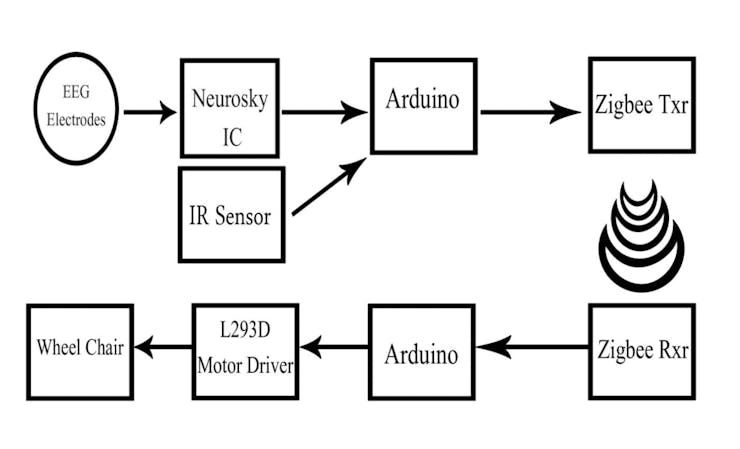
Mind Controlled Robot Using Arduino and Mindflex
How we created a Mind Controlled Robot using Arduino which was later converted to a wheel chair.
 Jithin Sanal
Jithin SanalBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Arno Munukka
Arno Munukka
 engineerkid1
engineerkid1
 [SF] Pigeon Kicker -- AkA James Ryan
[SF] Pigeon Kicker -- AkA James Ryan
 Dennis Johansson
Dennis Johansson
Every session is carefully designed to bring your body into balance and balance the mental, physical, emotional, and spiritual parts of who you are. https://www.lomilomiexperience.com