Redesign of GPSDO Master Clock
Key Features:
- Improved precision of PPS error measurement (8ns resolution)
- Improved tracking accuracy against GPS time base
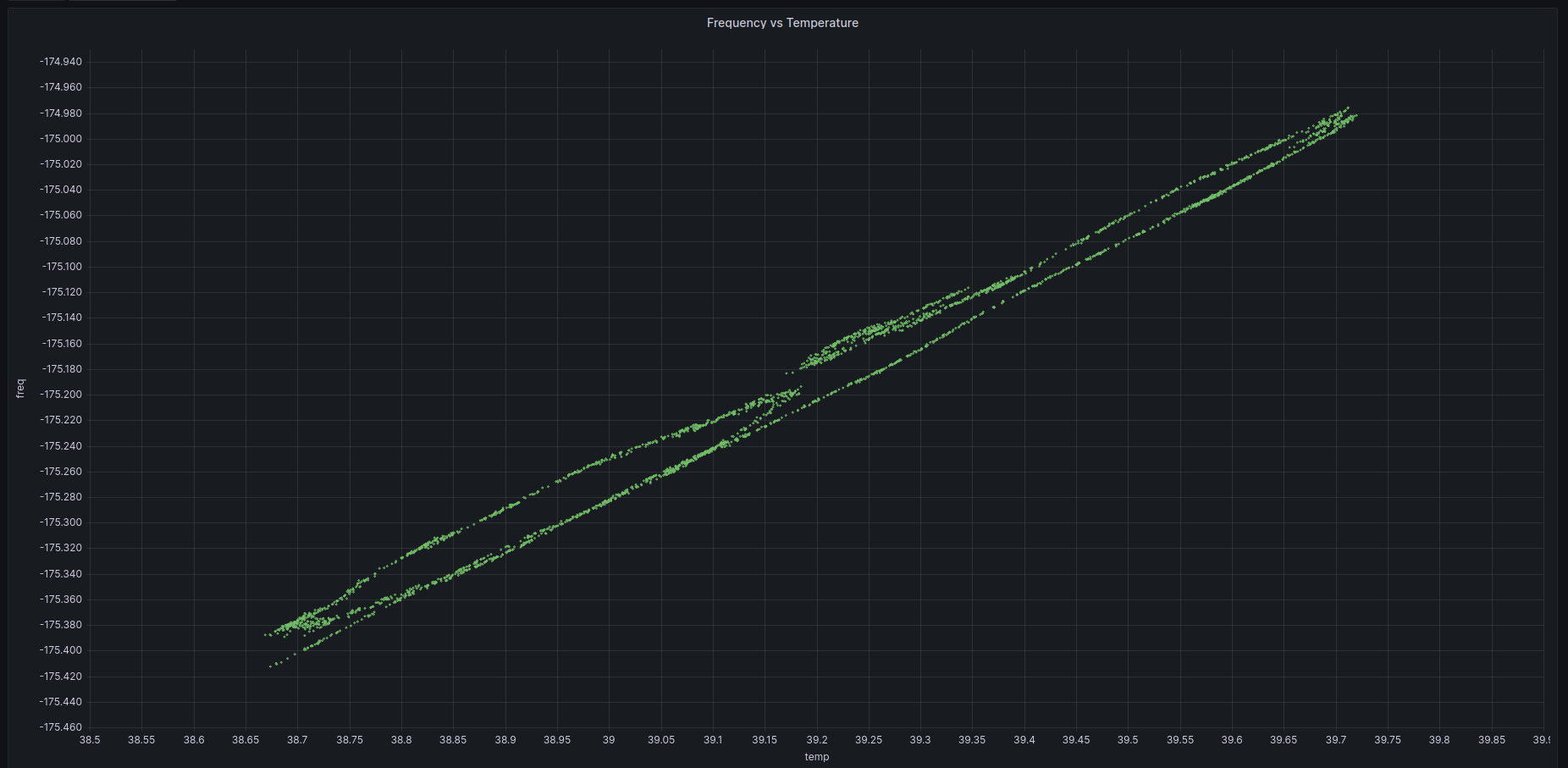
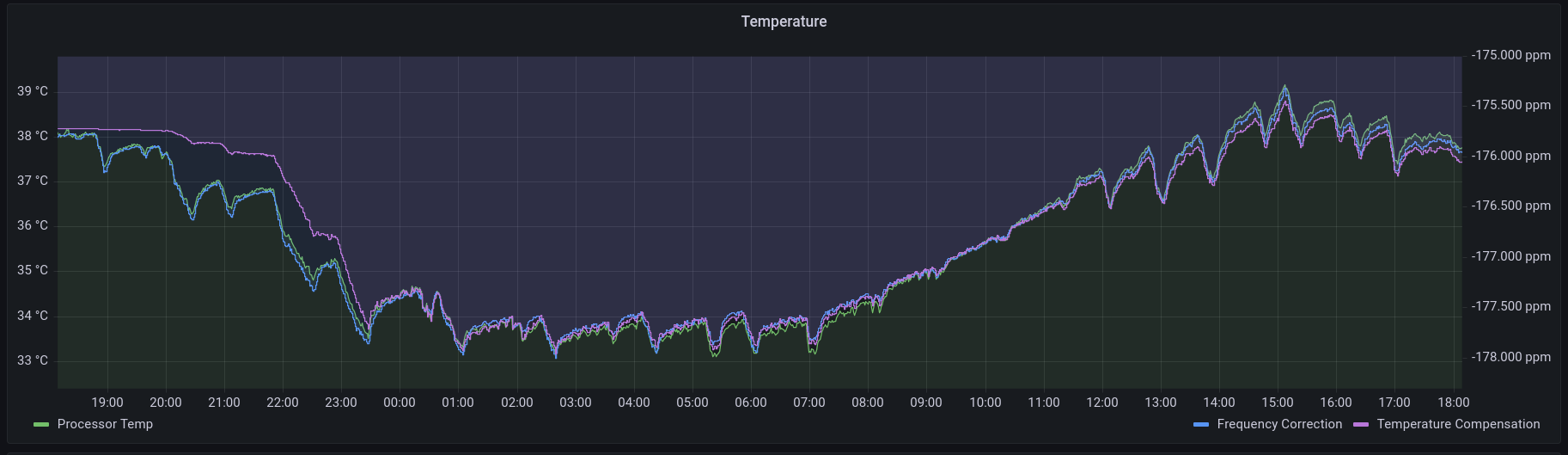
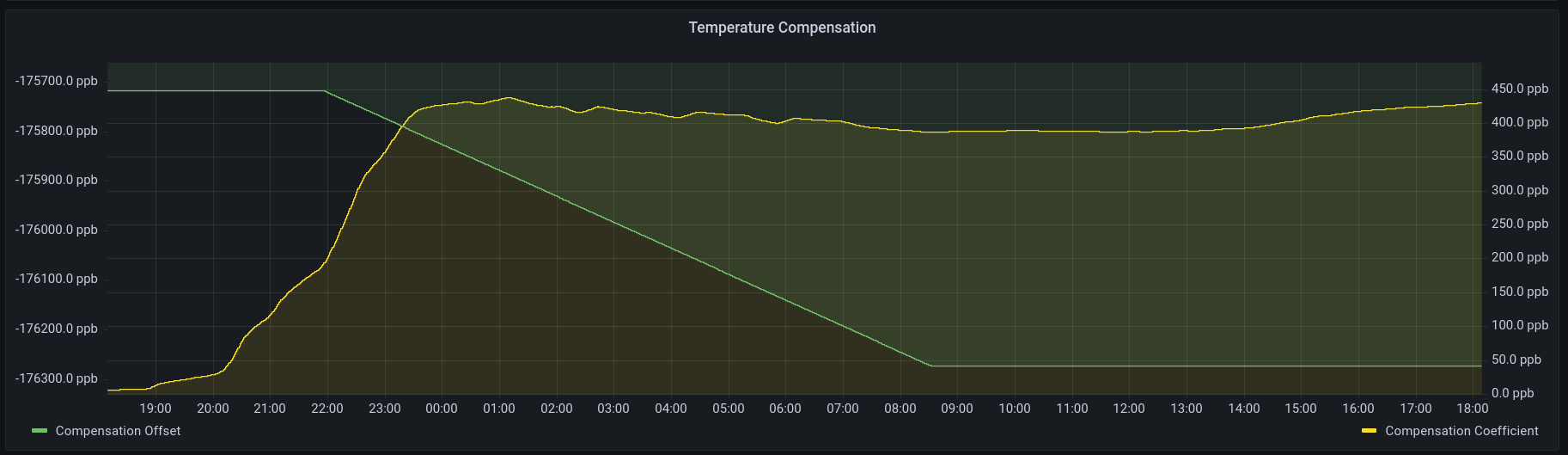
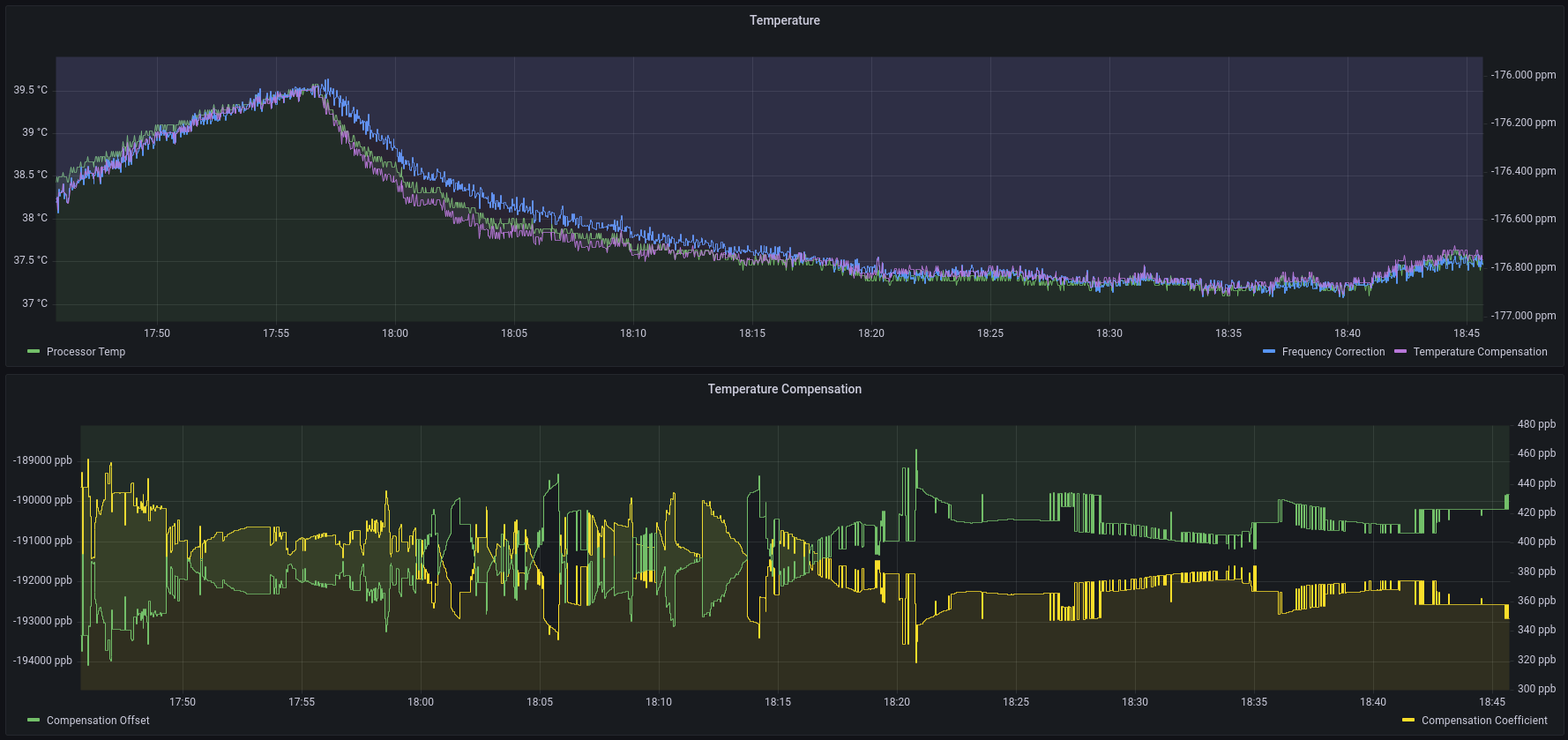
- Software temperature compensation with online learning
- Improved holdover accuracy
- Learns temperature coefficient of crystal and adapts with crystal aging
- PPS and 1 kHz reference outputs
- Base 100-TX Ethernet
- IEEE PTP Master
- NTP Server
- SNMP Server
- DHCP Client
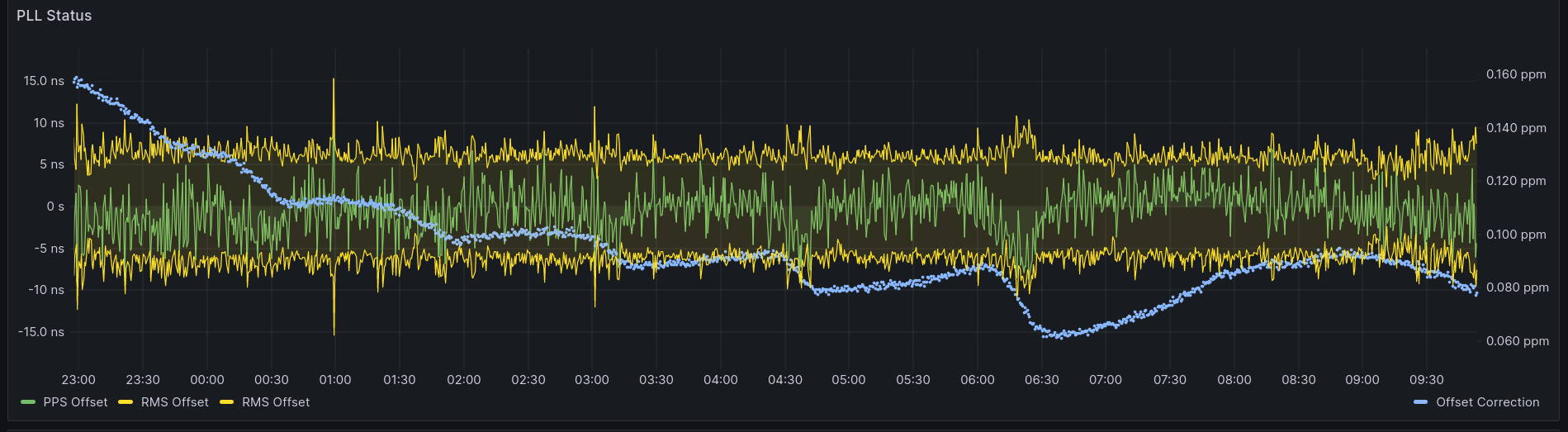

 PPS Tracking:
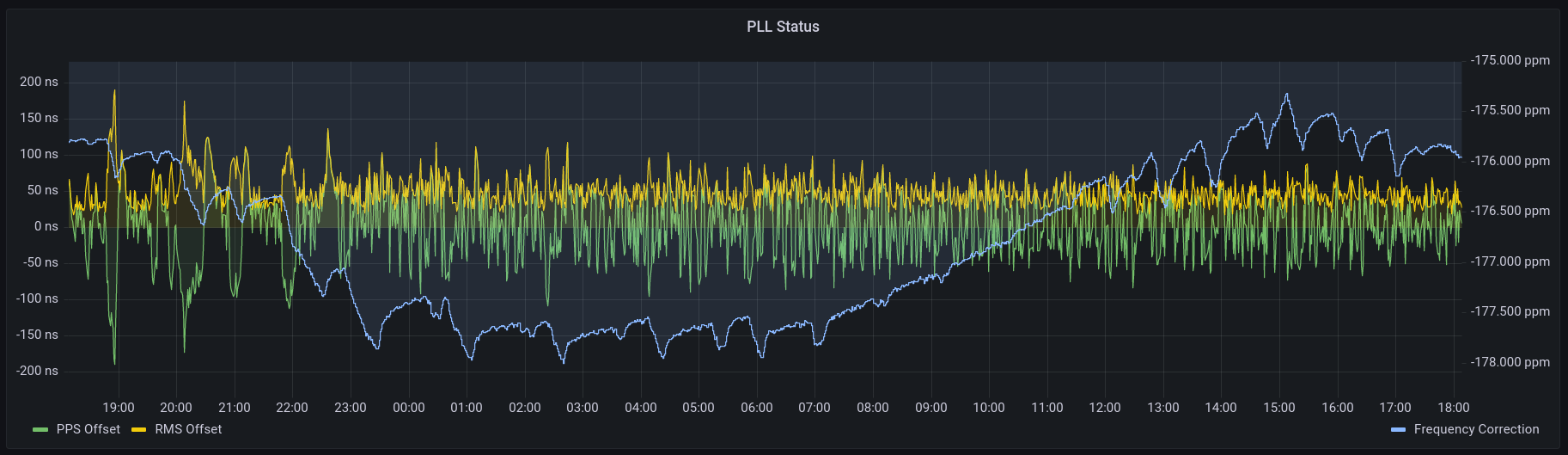
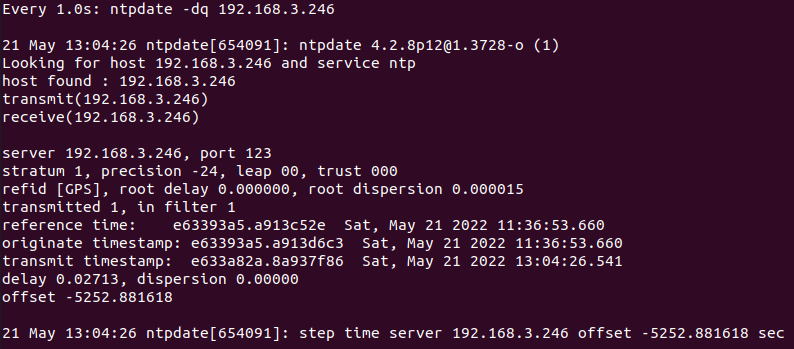
PPS Tracking: Comparison against GPS NTP server:
Comparison against GPS NTP server: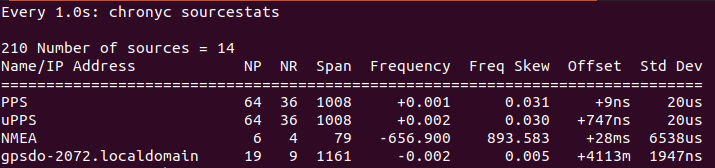
 I've been using an EK-TM4C1294XL eval board for prototyping. I'm currently working on an eval board layout for the DCXO and temperature sensor. The GPS eval board should be arriving sometime next week.
I've been using an EK-TM4C1294XL eval board for prototyping. I'm currently working on an eval board layout for the DCXO and temperature sensor. The GPS eval board should be arriving sometime next week.
 Nick Sayer
Nick Sayer
 Dave Ehnebuske
Dave Ehnebuske
 Gary Marsh
Gary Marsh
 vwphan
vwphan