 Mark Rehorst
Mark RehorstI'll be posting a lot of details to my blog, and post a link to it soon. In the meantime, here is some basic information about the table.
General
I put a lot of effort into making the mechanism and electronics reliable and quiet., and largely succeeded. It is also capable of extraordinary speed and acceleration (for a sand table, anyway). My sand table running in real time looks like other sand table time-lapse videos. I routinely draw patterns at 500-1000 mm/sec but the table is capable of almost 2000 mm/sec. Acceleration can go up to 2gs before it throws the ball, though I normally run it at 5k-10k mm/sec^2.
The Mechanism
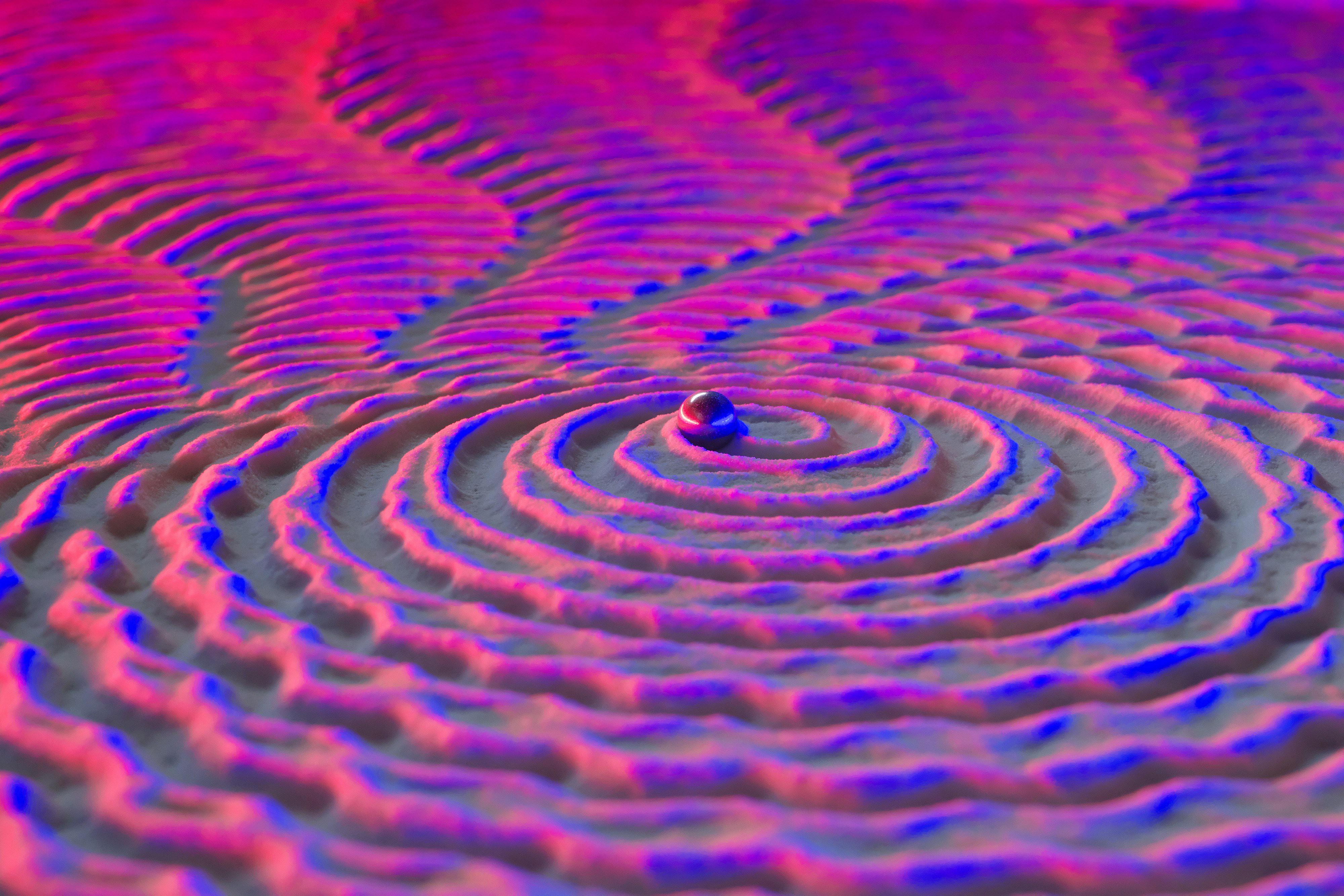
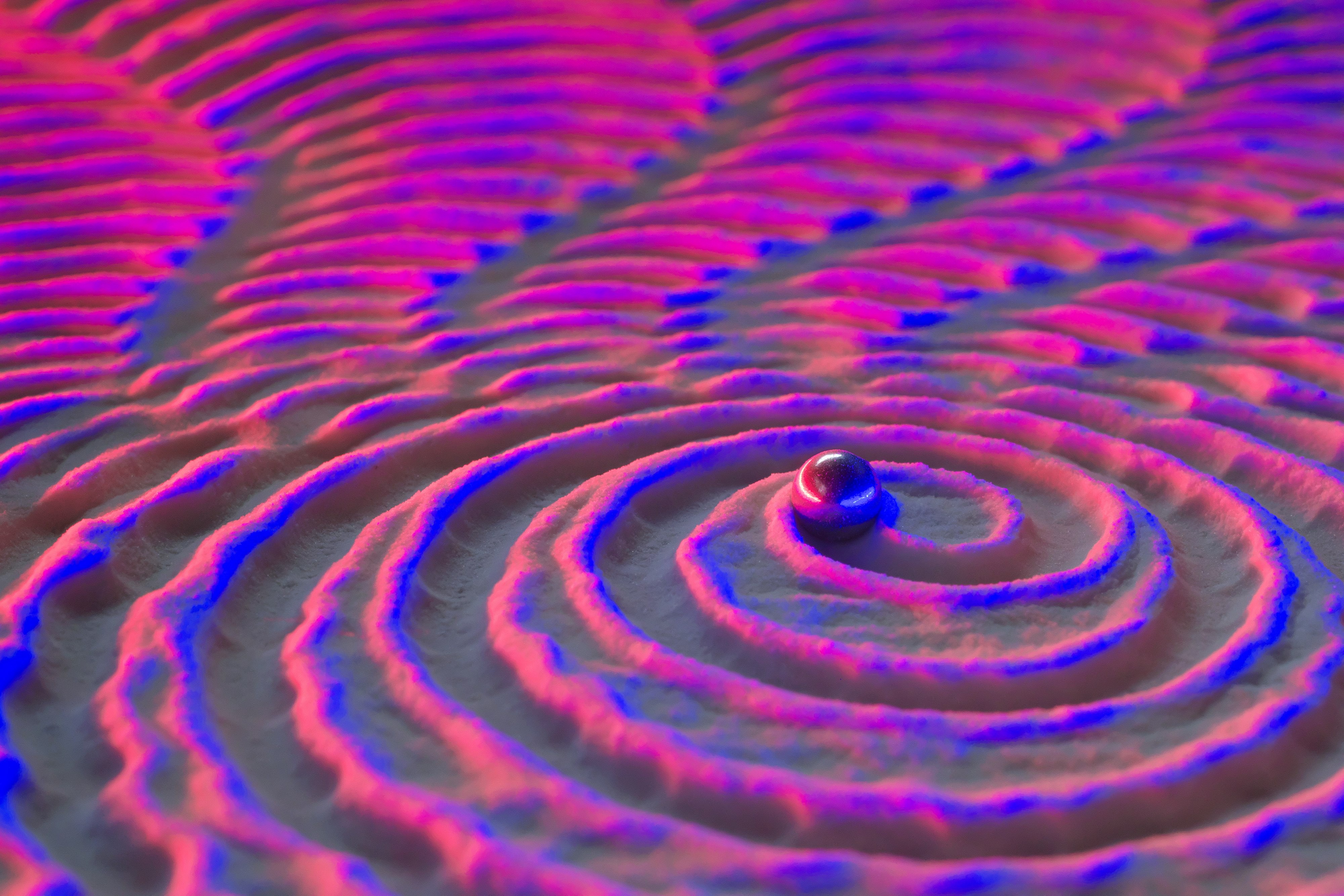
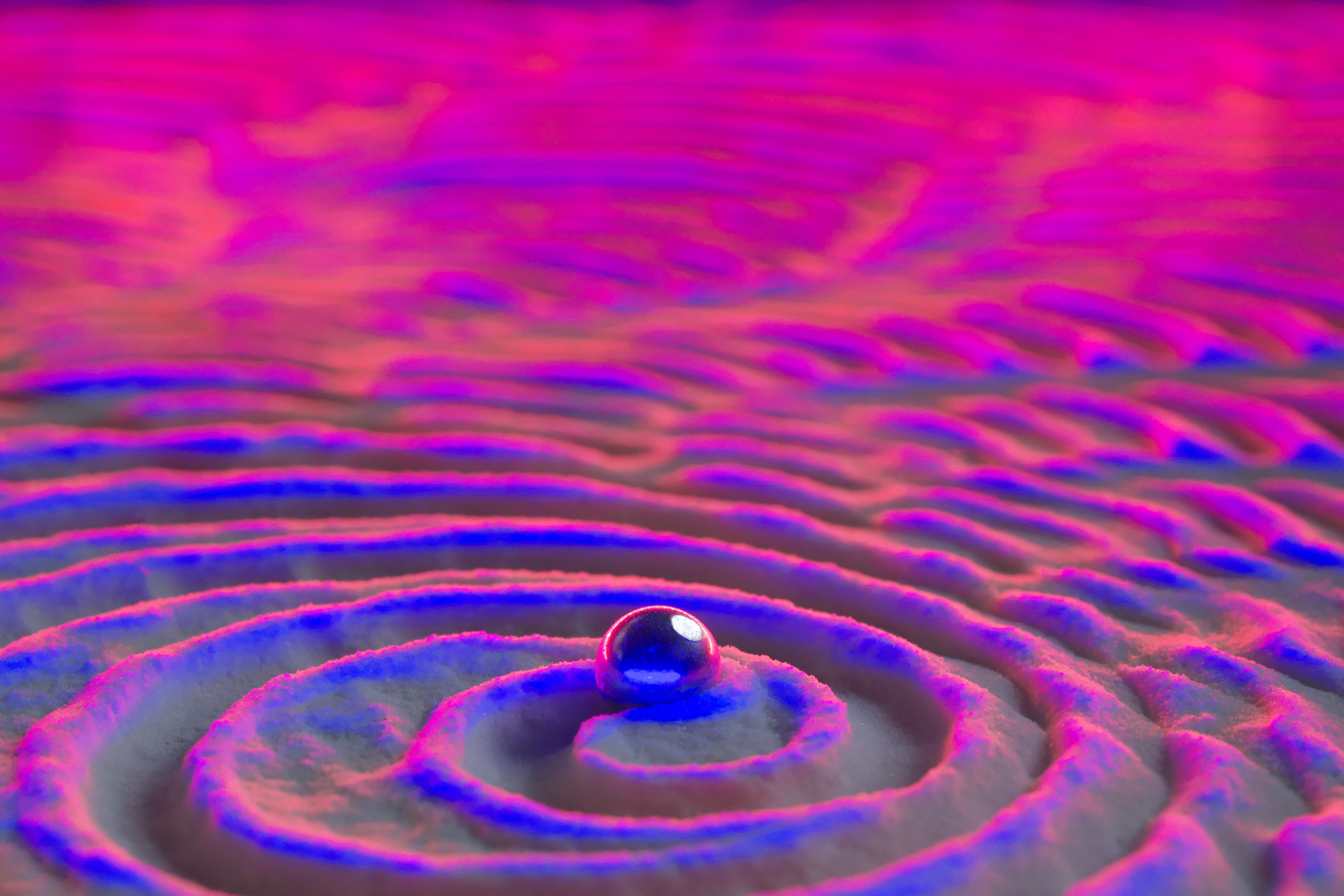
Arrakis uses a belt driven corexy mechanism powered by servomotors with 20 tooth pulleys. The frame is made of 45 mm square t-slot aluminum and all the mechanical parts fit inside the rectangular frame. The slots in the long rails serve as guides for the Y axis with sliding PTFE bearings. The X axis guide is a square aluminum tube and it too, uses sliding PTFE bearings to keep noise down. Pulleys are made from stacked F625 bearings. All bearing, pulley, motor mounts, and the magnet carriage are 3D printed. The table uses a 1" cube, N52 neodymium magnet. Patterns are drawn using an 11mm steel ball.
Electronics
Each motor has its own power supply, as does the Duet 2 WiFi controller board. There are two LED strips, red and blue, that are each powered by buck converters connected to one of the motor power supplies. The motors are iHSV 78W (there's no kill like overkill!) Nema-17 integrated servomotors. They are driven by step/direction/enable signals from an expansion board plugged into the Duet controller. The Controller has a web server that can be accessed to control the table via phone or laptop computer.
The Sandbox
is made with 1/2" walls and a 1/4" bottom from Baltic birch plywood. There's a layer EPDM rubber on the bottom of the box to minimize noise from the ball rolling. The sides of the box are finished with 1/2" high density upholstery foam covered with red and blue striped fur cloth. The box is mounted so that there's an air gap between the bottom of the box and the magnet to minimize noise. The top cover consists of an oak frame that has been stained and finished with oil based polyurethane which holds a tempered glass cover. The cover was put at coffee table height and the bottom of the sandbox placed close to the floor to keep sand from sticking to the glass. The sides of the box come down almost to the floor to keep Ms. Kitty from getting under it and chewing on wires or belts.
Software
Patterns are generated using Sandify. I wrote a post processor to take advantage of the high speeds that the servomotors can provide. The post-processor allows two speeds to be set in the pattern files- a low speed for drawing the pattern and preserving detail, and a high speed for travel around the edges of the table. Now, for example, I can specify that the drawing should occur at 100 mm/sec and the edge motion at 1000 mm/sec. In some patterns with a lot of edge motion the result is a significant reduction in pattern completion time and reduced boredom if you're watching the table draw the pattern.






 Kevin Kadooka
Kevin Kadooka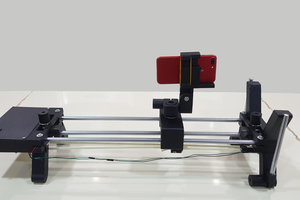
 Rahel zahir Ali
Rahel zahir Ali
 treibair
treibair
Beautiful pictures, the two colours really look great. Do you have a video of it in action?