 Sam
SamThe chess board is made up of 3 parts:
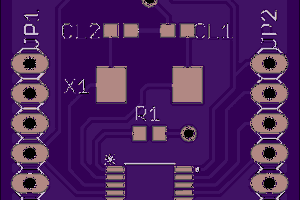
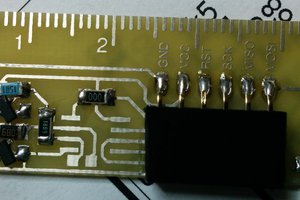
- The piece detection (the top layer of the board) is an 8x8 matrix of reed switches using a button matrix circuit (I found this page useful) connected to an Elegoo nano.
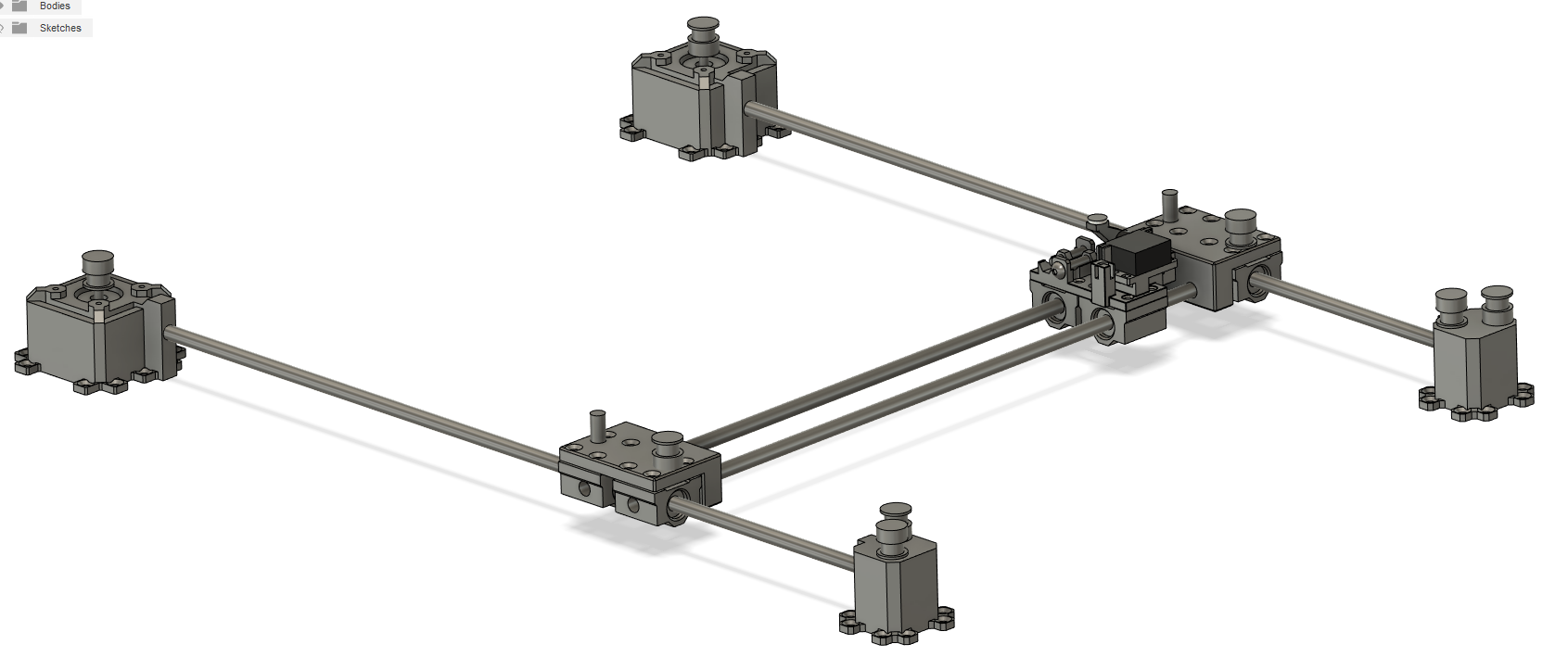
- The movement uses the CoreXY system (https://corexy.com/) as using 2 stationary stepper motors made it easier to design. Most of the parts are 3D printed on my Tevo Tornado and I used 8mm aluminium pipe with linear bearings for the runners. The pipe is hollow which led to the movement to be a bit flexible so if I were to do it again I would have used linear rails or aluminium extrusions as it would have made everything a bit sturdier. It is quite slow at the moment because of the weak frame however if it was sturdier and I could tighten the belts more I think it could run much faster. Attached to the gantry is a servo with a magnetic arm to grab and move pieces from under the board.
- The final part is the chess code that control the movement and send moves to the LiChess servers to play online, this is all written in C++ using SDL2 to do graphics. I am planning to have this all running on a Raspberry pi 4 with a touchscreen. (current code: https://github.com/samsung771/Chess)
Current progress:
The board uses A* pathfinding to avoid colliding with other pieces.
Testing piece detection:
Testing XY movement.
Test of entire system
I designed all the movement using fusion 360, this is the most recent version although there have been some manual alterations to the physical version.
 XDjackieXD
XDjackieXD
 Alpenglow Industries
Alpenglow Industries
 Pedro Minatel
Pedro Minatel