 Samuel Meurice
Samuel MeuriceStl files and description doc on Cults3D : https://cults3d.com/en/3d-model/gadget/cybot-cycloidal-disk-robot-arm
0%
0%
3d printed - CyBot Cycloidal 6 axis Robot Arm
A 3d printed robot arm using cycloidal gearbox and steppers.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 matthewhallberg
matthewhallberg
 BINGOBRICKS
BINGOBRICKS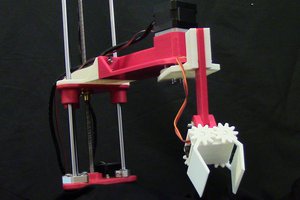
 slantconcepts
slantconcepts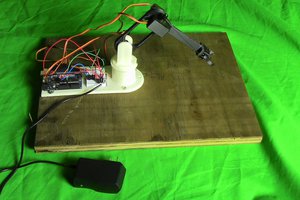
 gabebentz
gabebentz
Hello, no I don't home at the moment, I was thinking to experiment MPU-6050 ( Gyro Sensors + Accelerometer for arduino)