0%
0%
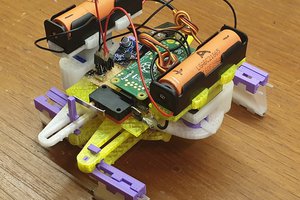
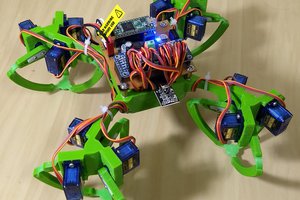
Hexapod Of Pathetic Engineering (HOPE)
This is my first attempt at making a multi-legged insect inspired robot. I hope to use HOPE as a learning vehicle to a larger bot project.
 Neuntoter
NeuntoterBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Martin Vincent Bloedorn
Martin Vincent Bloedorn
 Fabio Vezzari
Fabio Vezzari
 Vipin M
Vipin M
Can't wait to see what you come up with.