Have you ever had that time when you're idly thinking and the thought "I should do something about that one thing before a problem arisises?". Well this morning I remember thinking
You know, if those motors go OOS (out of stock) like what happened with SmartKnob, it's game over, right? Like... just saying... we should finalise this design fast or even just buy 20 motors now.
before replying to my other self
They've been on the market for like over a year at this point. I think we're fine.
Well, I was scrolling though this lovely looking website of the Ratchet H1, which is the first commercial haptic knob I've seen, and was thinking "Ok, maybe I was a bit too hard on myself complaining that the £25-or-so Tetrinsics were too expensive, considering this is almost 6X the price."
Then I remembered that I hadn't updated the BOM spreadsheet since Concept3.2 over a month ago.
First item: LCD screens.
Me: Oh, that's no longer in here. Delete that row.
Second item: 580KV Motor.
Me: Oh yeah I better go check to see that the price is still the same.
First link: £1.95
Me: !
Second link: £2.54
Me: ! !
The message over the basket: Sorry, this item is no longer available!
Me: Starts scrolling my wishlist where I certainly saved the motor
The background music when I manually get to the bottom of the page, seeing nothing: Quiet and ominous [00:47s]
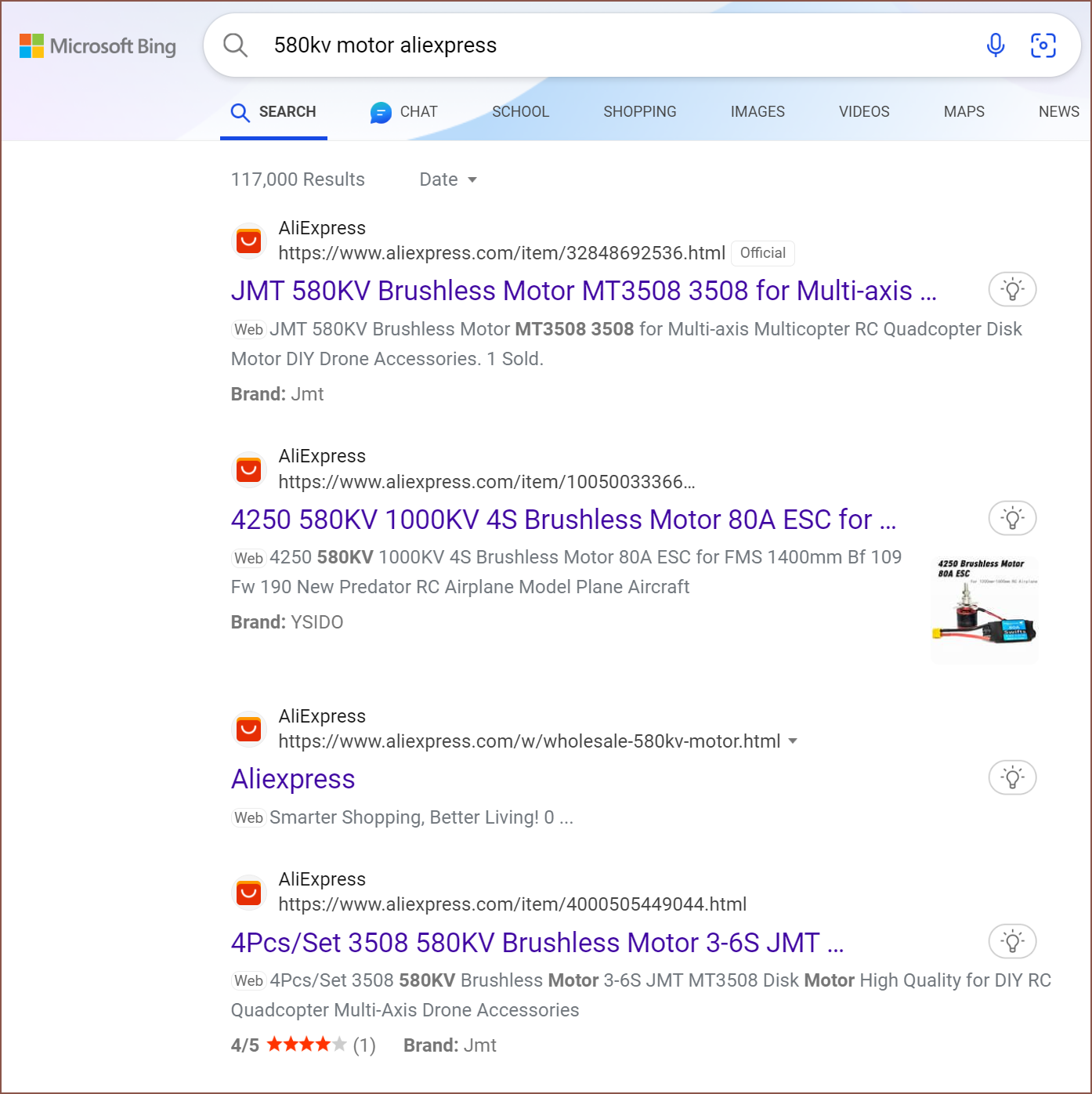
Vivaldi: 0 search results for "BLDC" or "580KV"
Bing: Shows 4 results, all of them wrong
Google: Links me to the £2.54 listing
Sigh. And just when I was feeling a bit excited with some "we are so back" energy. I was already kind of worried that these small motors were just old stock from something random. I've also read my fair share of products that have manufacturing or sourcing issues (like almost every hardware Kickstarter, Prusa, even Apple with the Vision Pro).
If the 580KV motors don't magically come back, or an alternative motor (I somehow missed every time I searched for it over the past 12 months) isn't discovered,
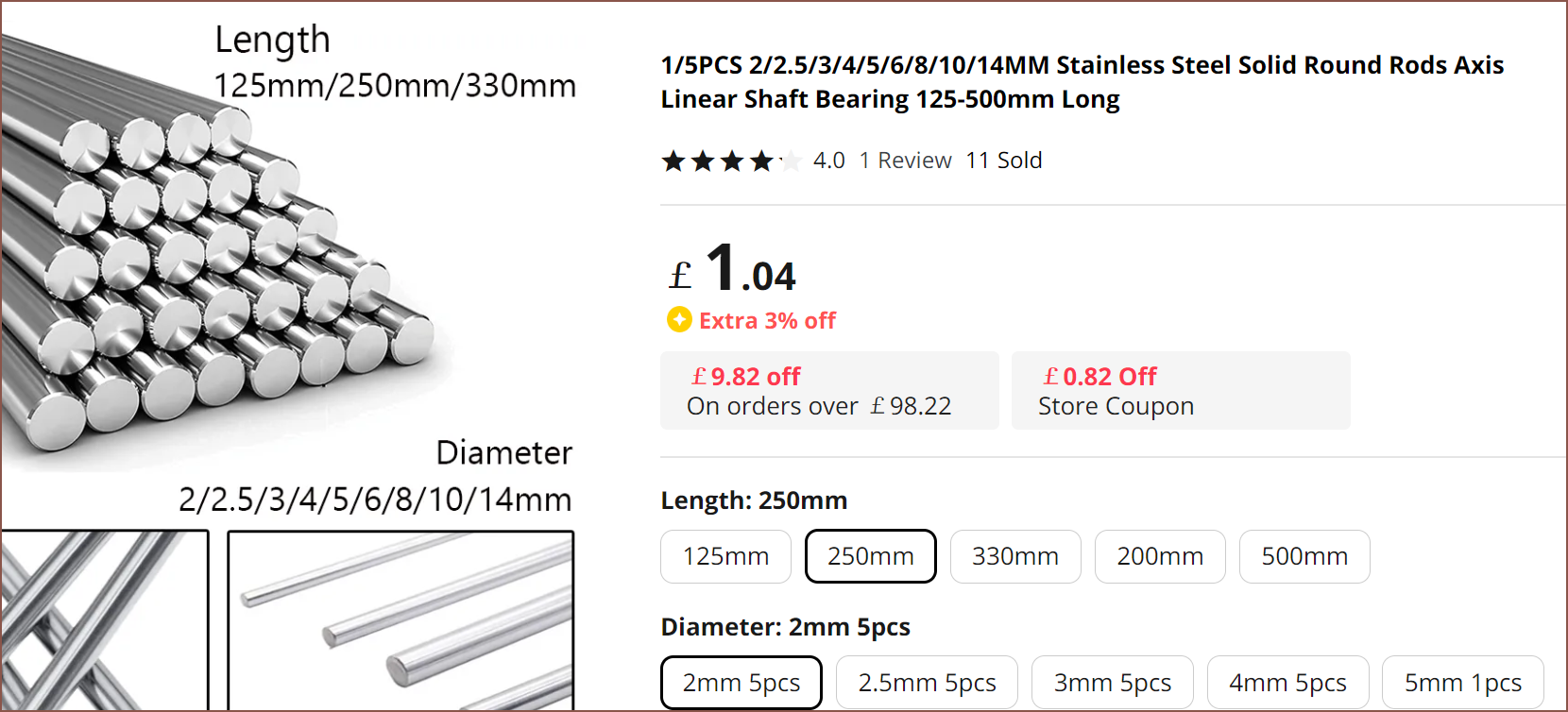
I first mentioned this in this Tetrescent log, but I've spent 3hrs modelling a new solution. The main reason being that most Aliexpress listings for stainless steel rods start at 2mm:
Secondly, even though one is probably never going to push down 500gf onto any Tetrinsic when in normal use (my thumb usually hits 420 - 450gf max and 300gf when not putting in the extra effort), the safety rating of 2.0 isn't ideal.
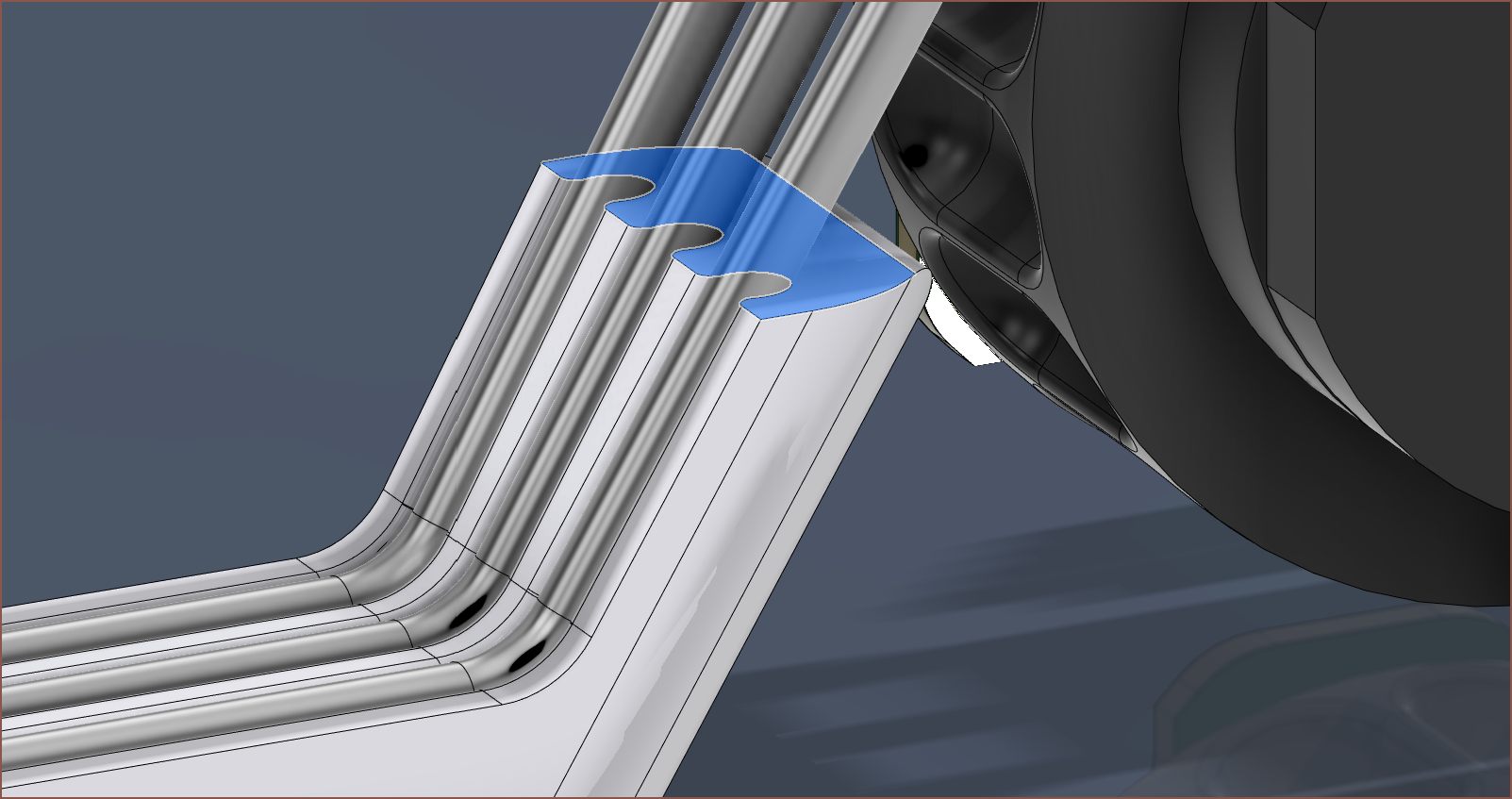
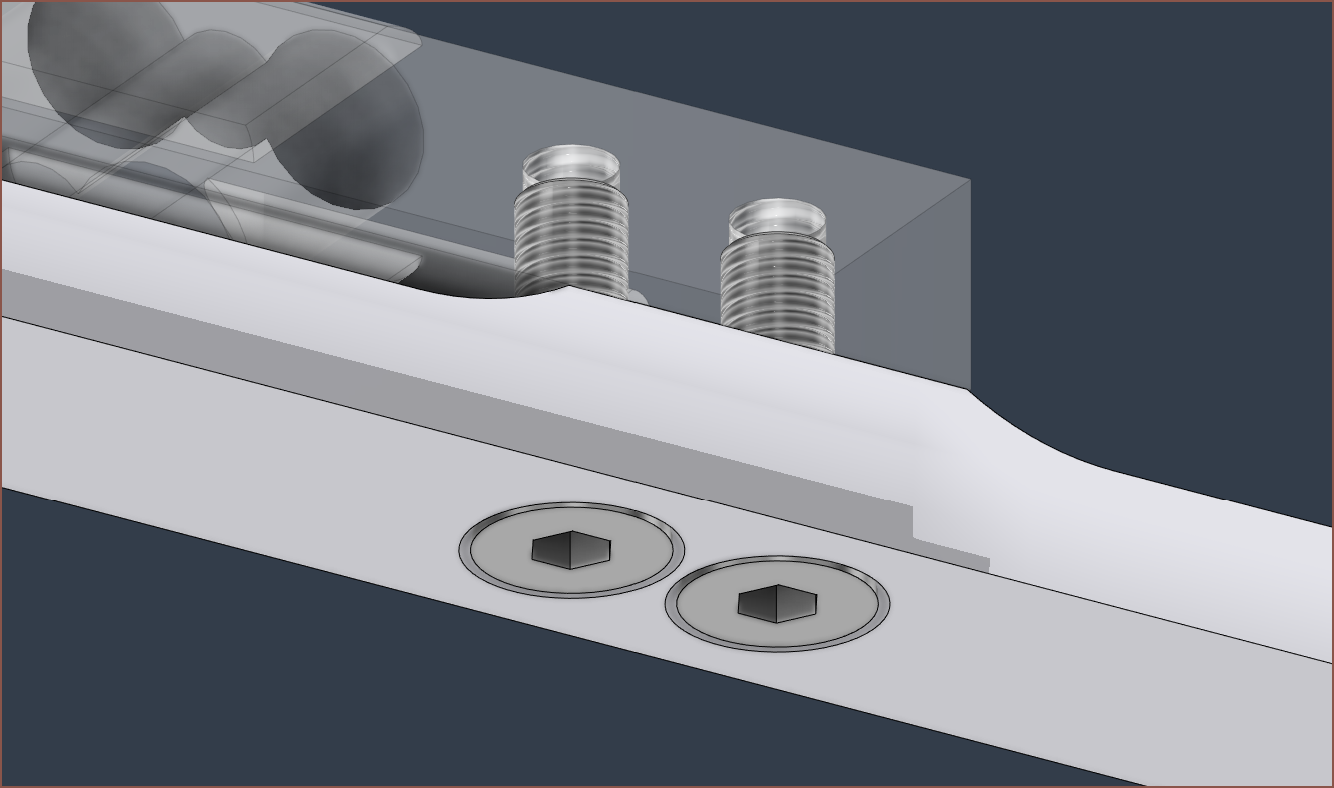
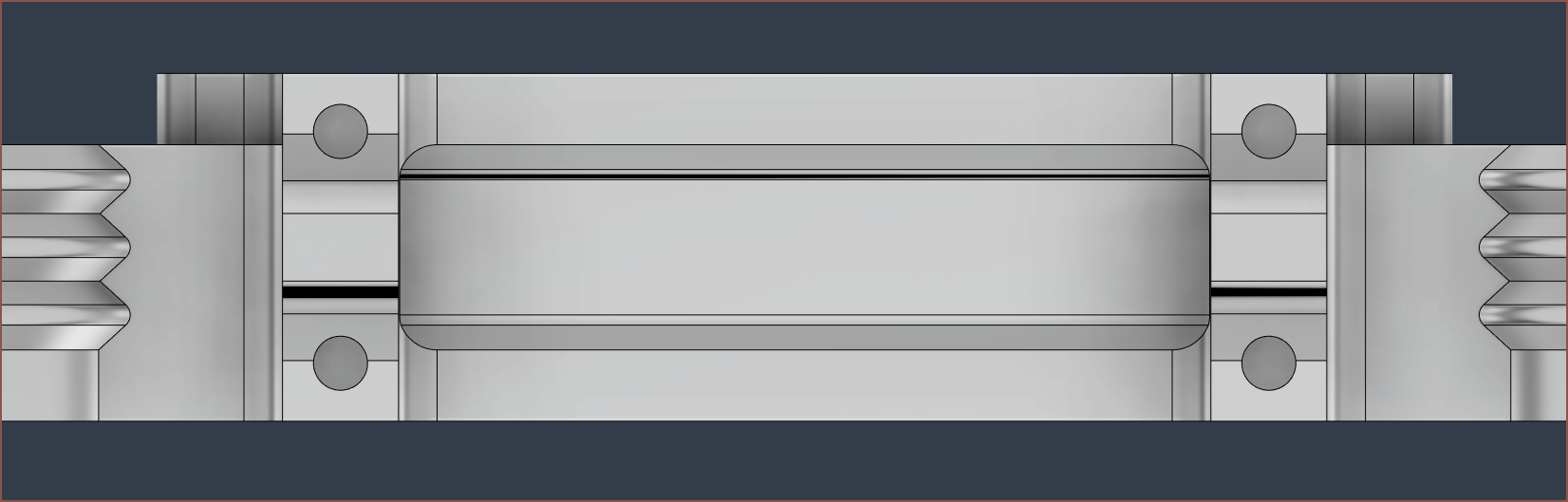
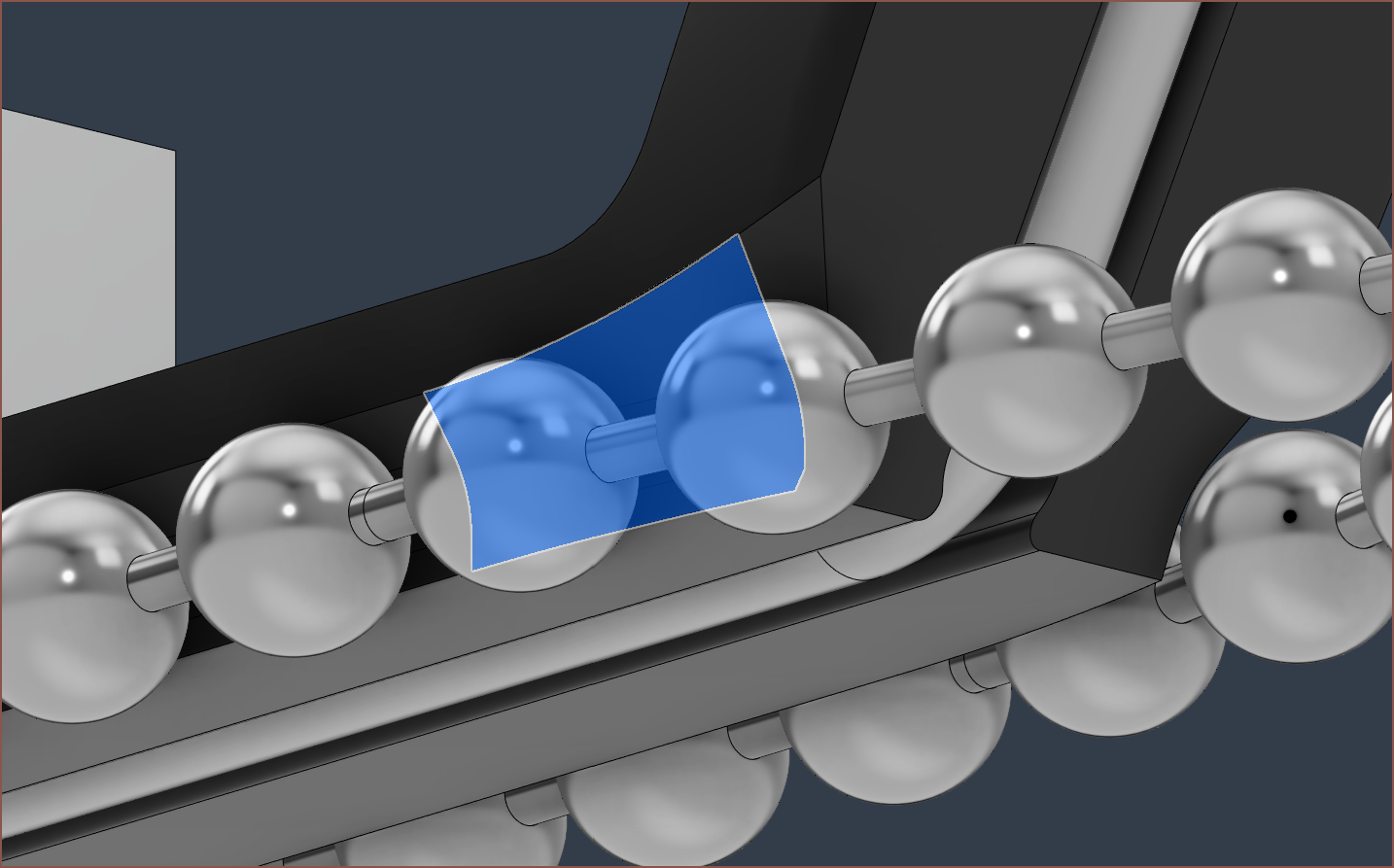
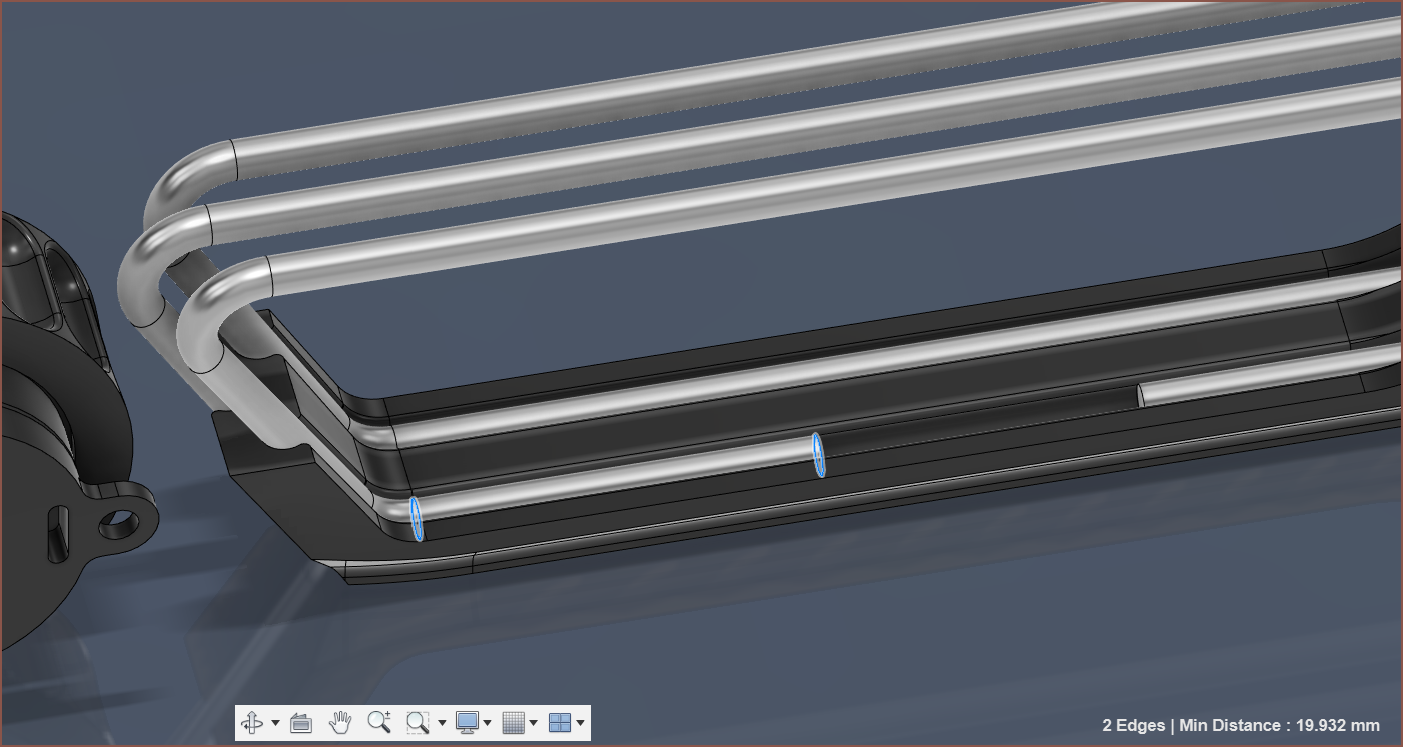
It turns out that the solution to the question "Should I have the rods go over or under the collector?" is actually "Both.":
This is to allow the collector to obtain minimum wall distances of 1.2mm whilst also allowing the ball chain to slide past. I've also added this smooth curve to ease the transition from air to the side of the pressure collector:
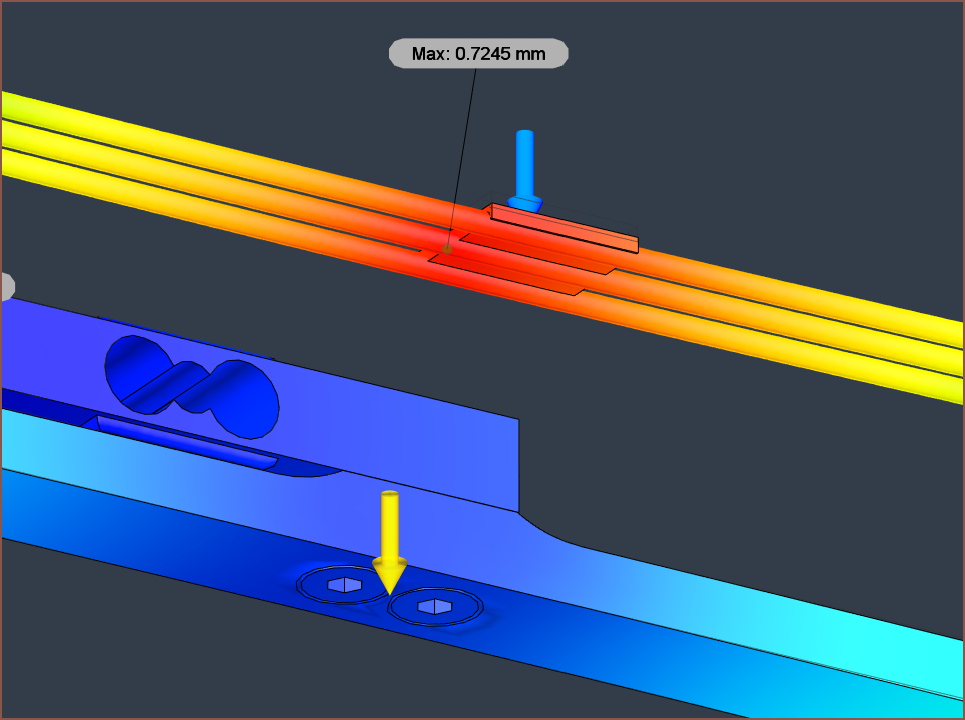
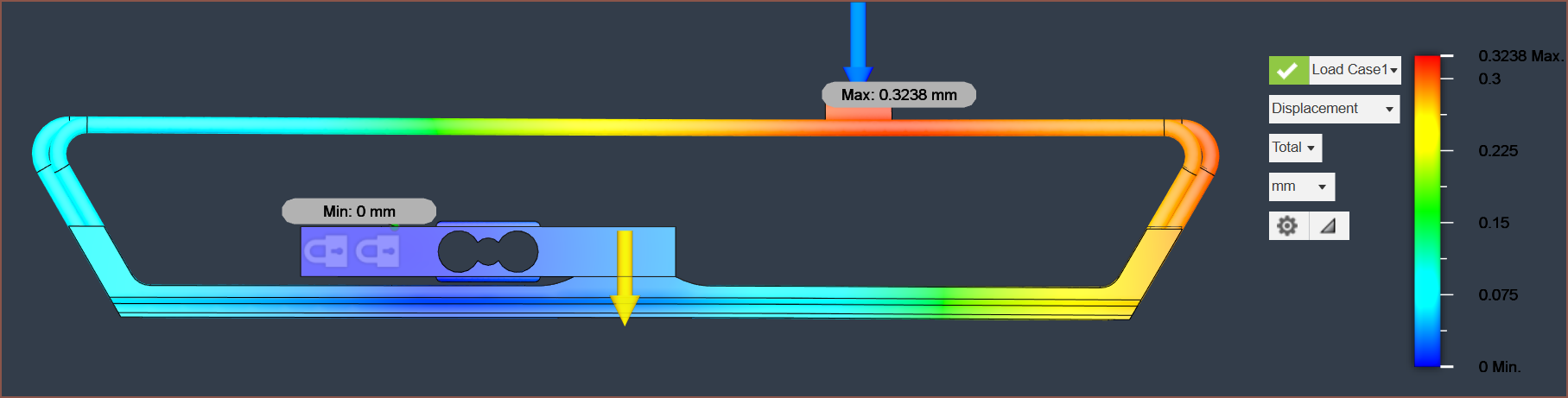
The new assembly has a much nicer looking displacement profile:
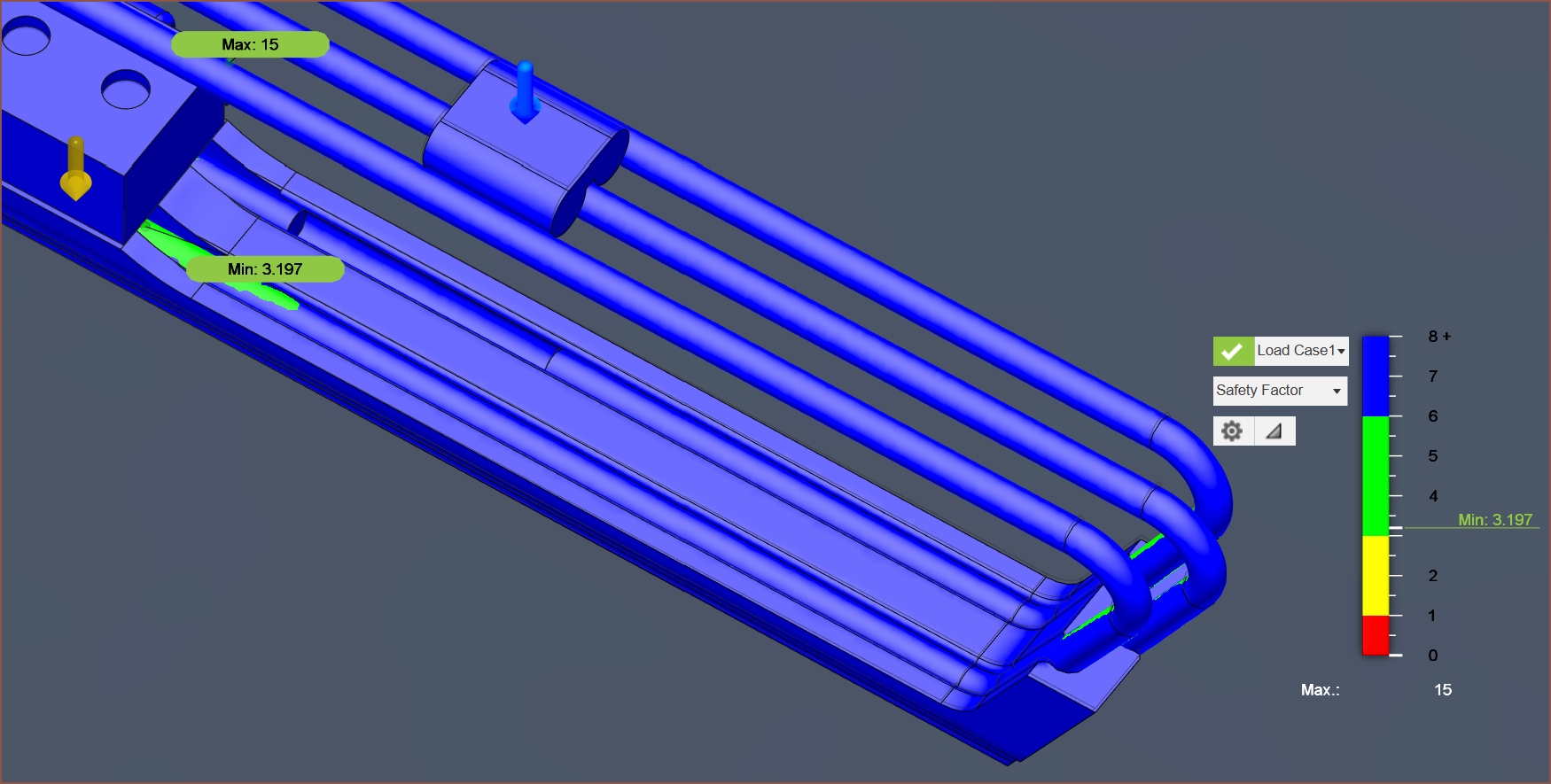
The minimum safety rating is over 3, but it's unexpectedly in the area just under the load cell:
Now that I've slept, this could be caused by the rod-ending offsets being too close together, meaning there isn't enough overlap where all 3 rods can bear the force. Increasing this offset to 27mm (from 20mm) reduces displacement to 0.300mm (from 0.324) and increases the safety factor to 3.78 (from 3.20). Reducing it to 10 increases displacement to 0.359mm and reduces the safety to 2.78:
I'll go with a 29mm offset to leave about 20mm from the last bend:
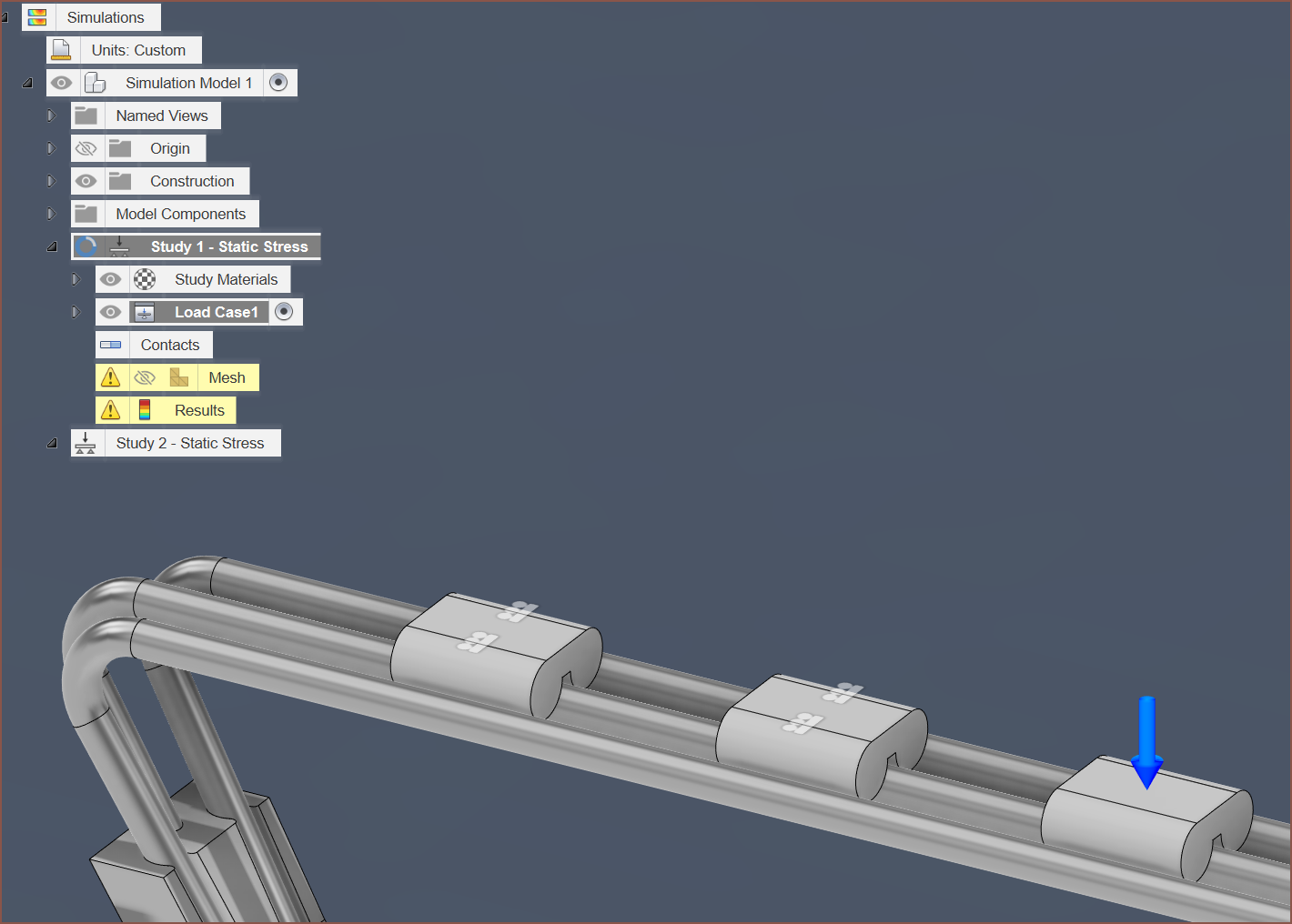
I'm now trying to see if I can actually obtain simulations for multiple force points by making the ones that have no force applied "frictionless":
No, that failed:
I'll just have the forces without the "frictionless" constraint. I'll assume that the extra bodies have a negligible weight.
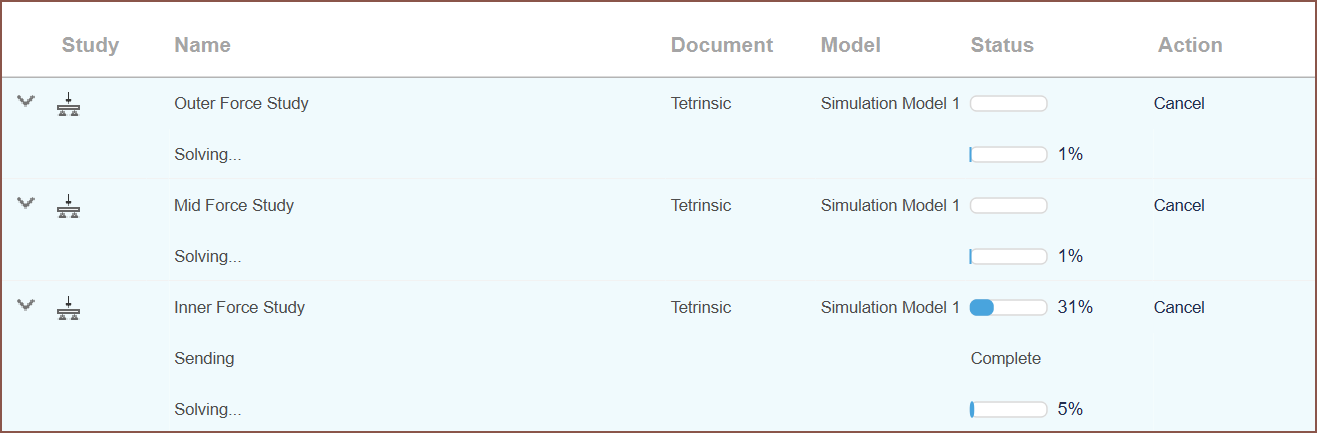
It seems that Fusion does each solve sequentially. At least that means I could be inspecting one study while another one solves on the cloud. Anyway, here are the results:
I've set the displacement to "Actual" above, but to better see what's happening on a micron level, "Adjusted" is below:
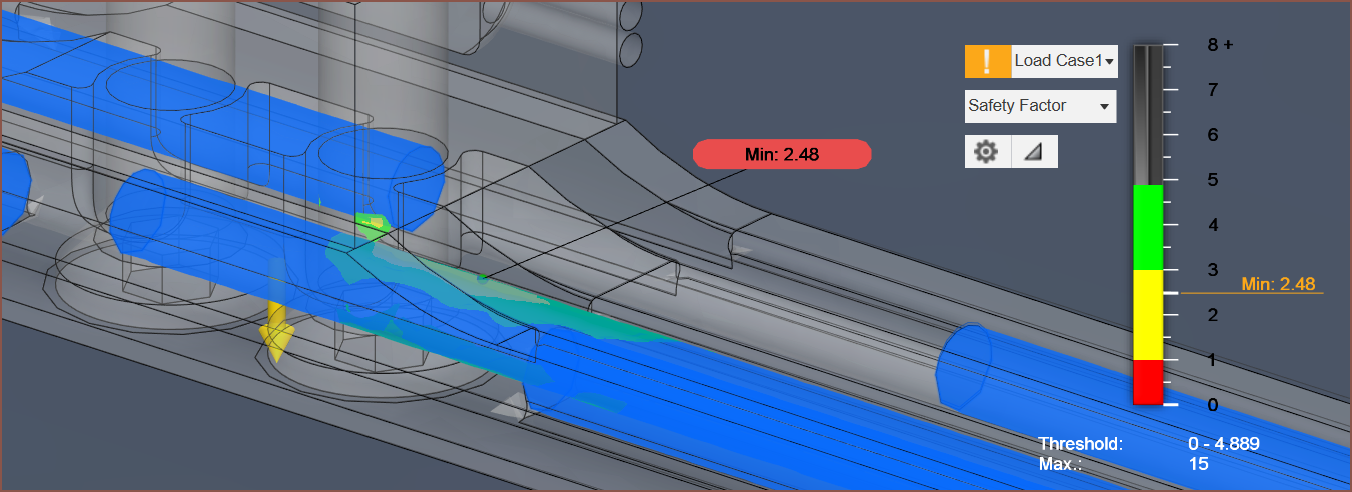
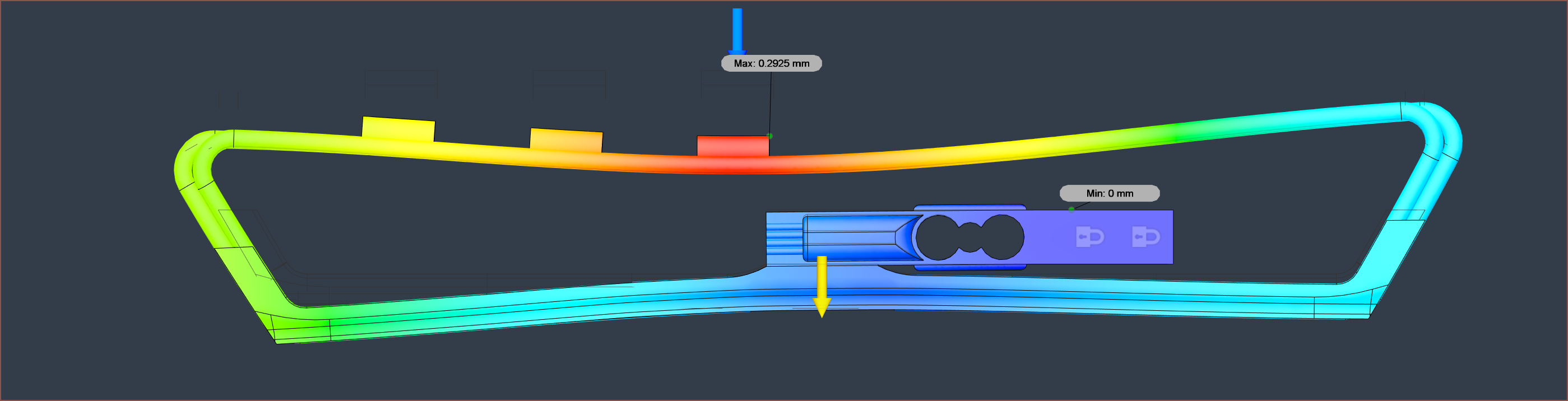
It seems that the "minimum of minimum safety factors" is 2.94, when the force is applied near the ends of Tetrinsic. The outer force position has a max displacement is only 0.35mm, so it should feel rather solid throughout, even when pushing down at 500gf.
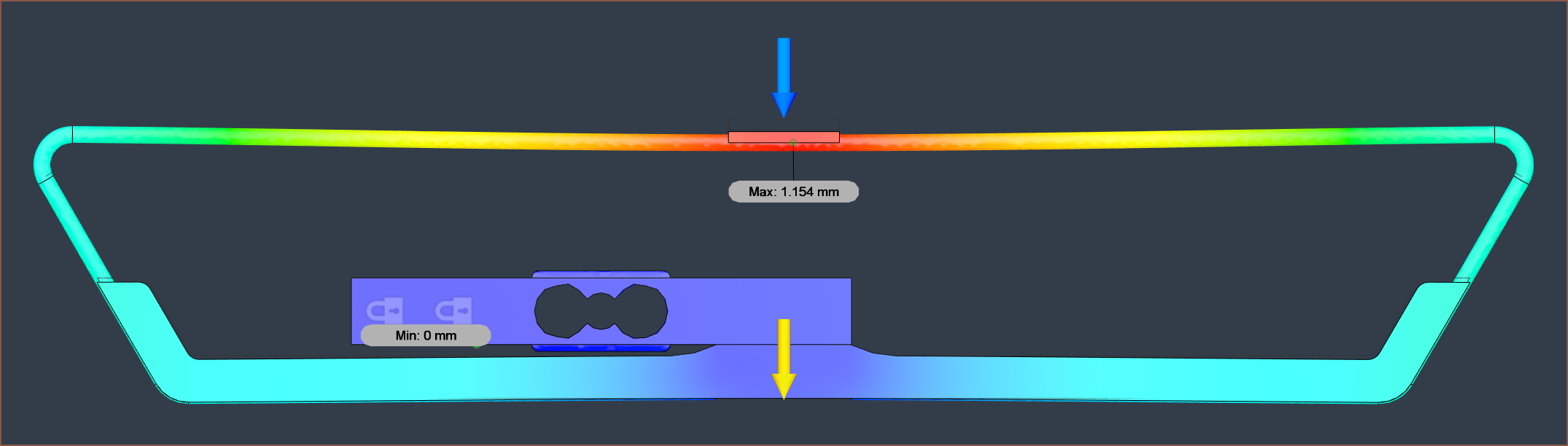
So I'm considering a 125mm solar cell for Tetent, and since this is much longer than my initial assumtion of a 75mm Tetrinsic, I thought I'd actually get a simulation.
I've modelled the tubes with a 60 degree inwards bend (instead of a 90 degree straight-down bend) so that the ball chain can take a shallower angle from the sprocket to the sides of the "pressure collector" as I call it.
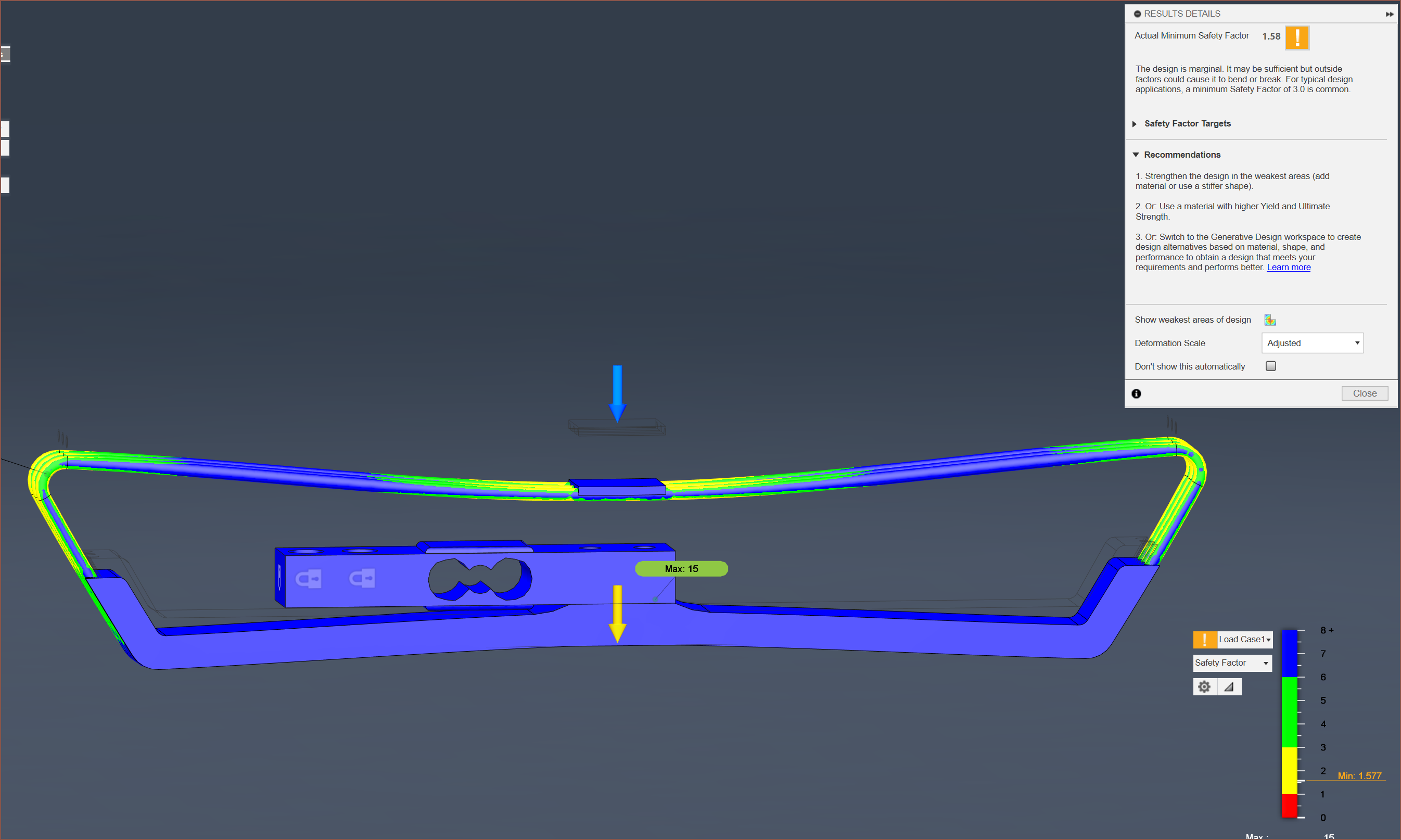
I've got a 500gf load exerted from the middle of the area, and it's already not looking so good, acheiving a minimum safety factor under 2. The good news is that, as expected, the load cell has almost no displacement, meaning that the force sensing area is symmetrical when under load.
The displacement is rather high, at 1.15mm. My goal is to cut that in half somehow.
This is where the outer tubes have their cutout not in the centre, which aims to have at least 2 tubes providing stiffness across the entire collector. I planned to do this on the 90mm Tetrinsic, but there wasn't enough length on the ends (only 5mm) before it needed to bend. Even still, this solution would be geometrically invalid since the tubes would intersect the countersunk screws.
Unfortunately, the displacement only improves by 0.1mm and the safety factor is unchanged.
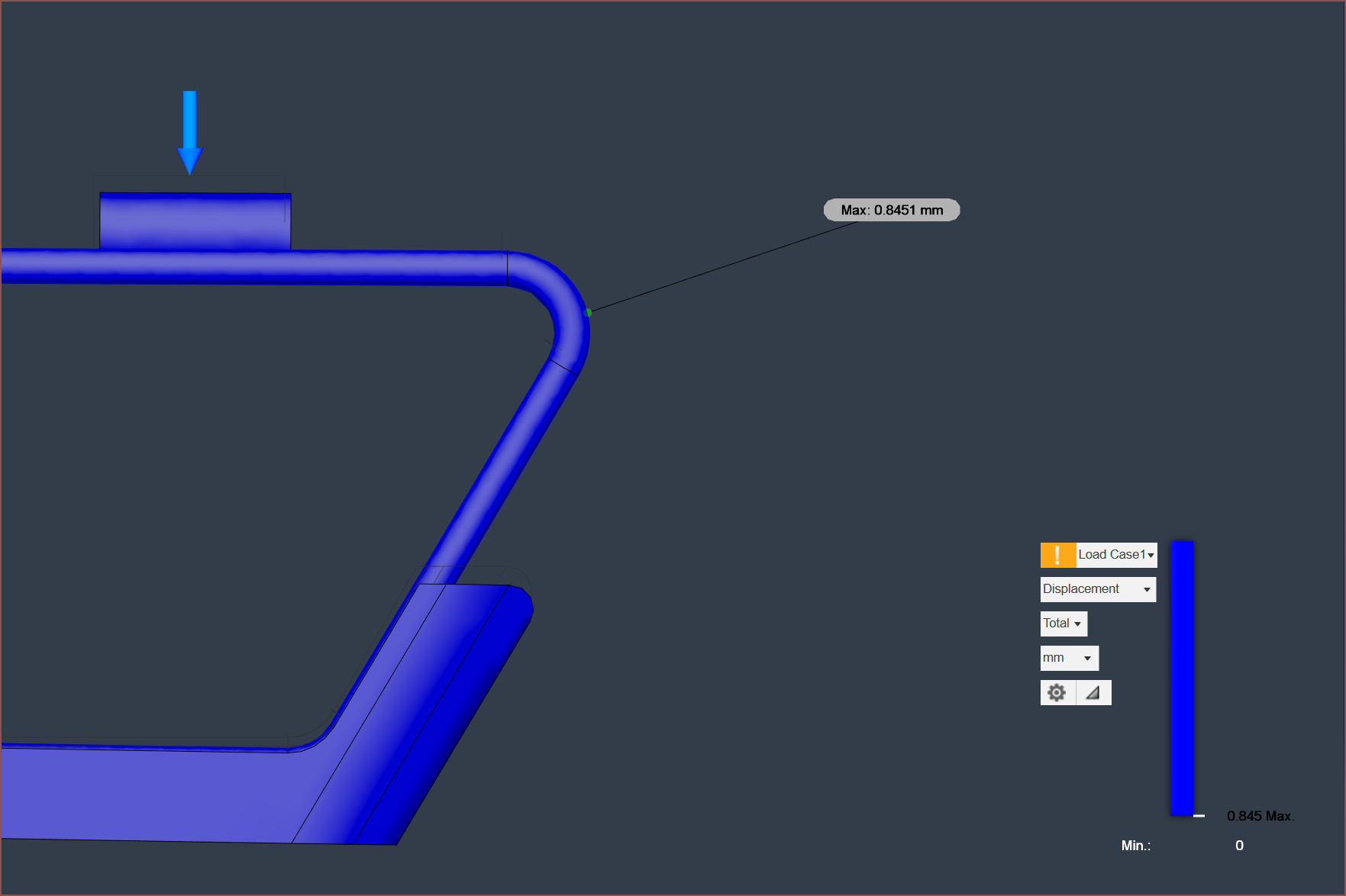
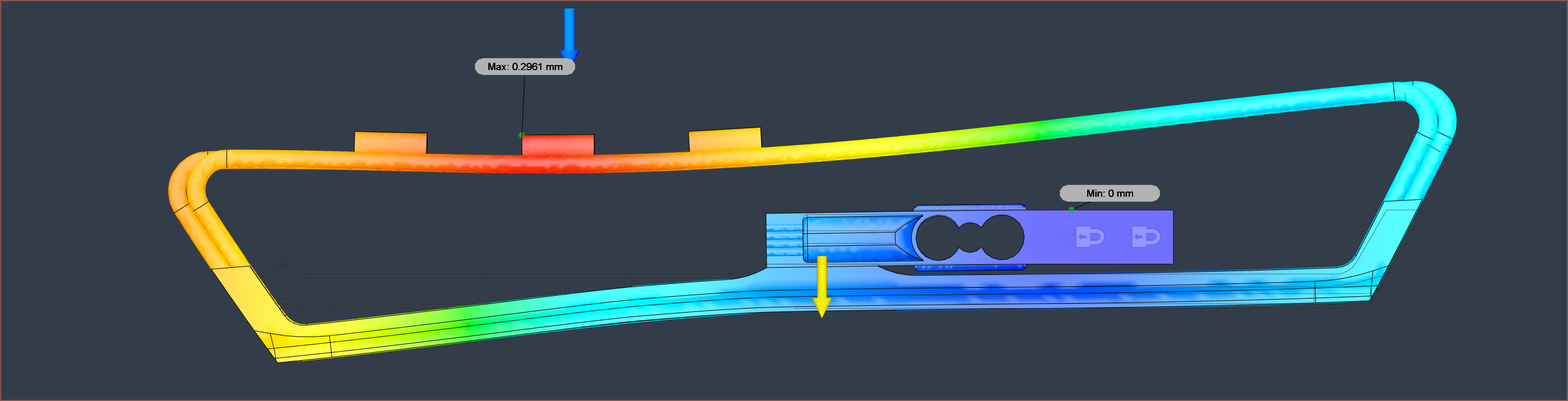
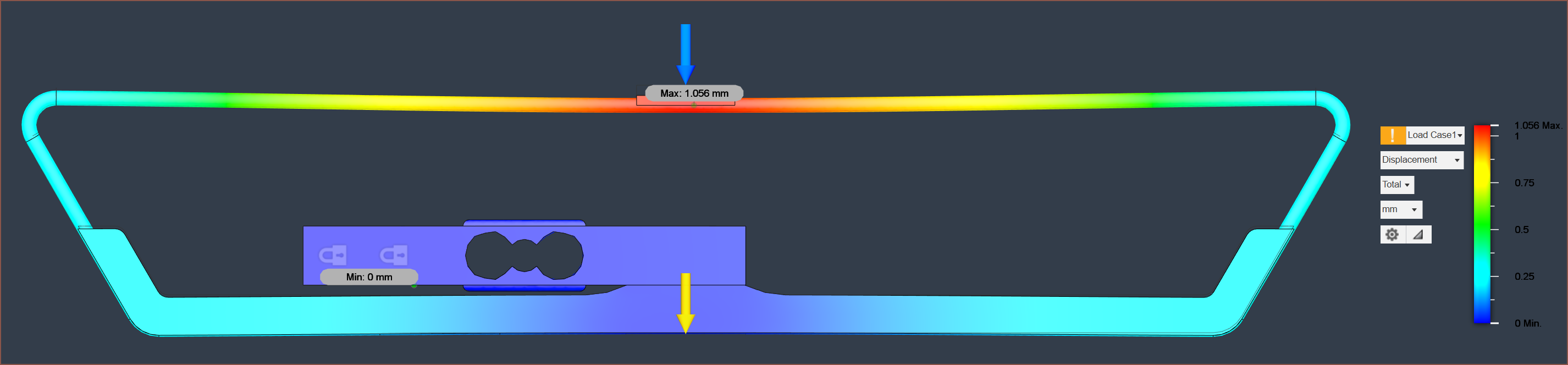
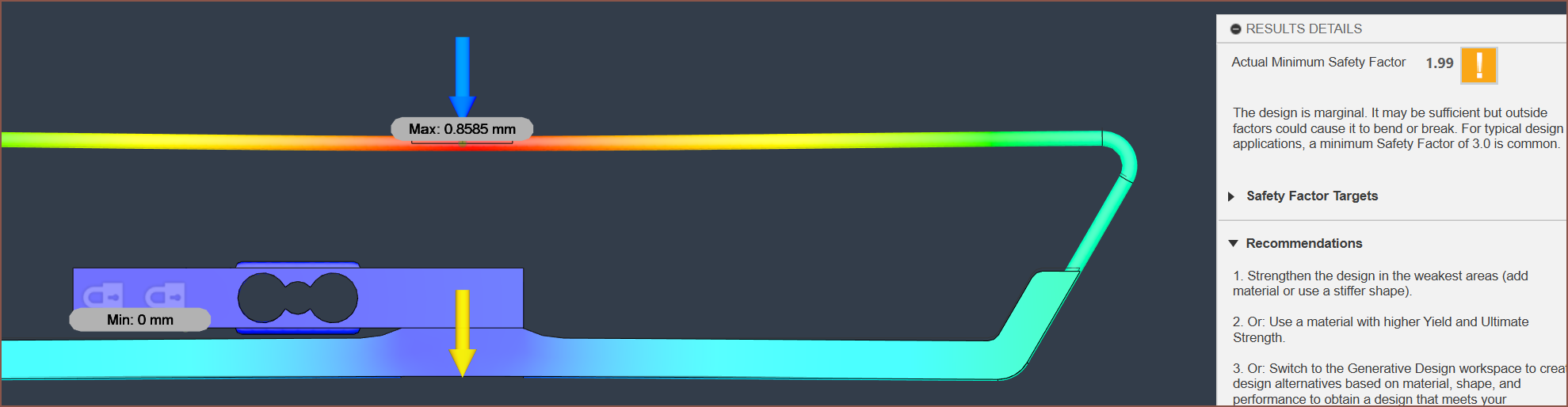
Returning to the aligned-end tubes and having them made from solid steel (so they're more like 1.5mm thick wires), I get a displacement of 0.86mm and a safety factor of 2.
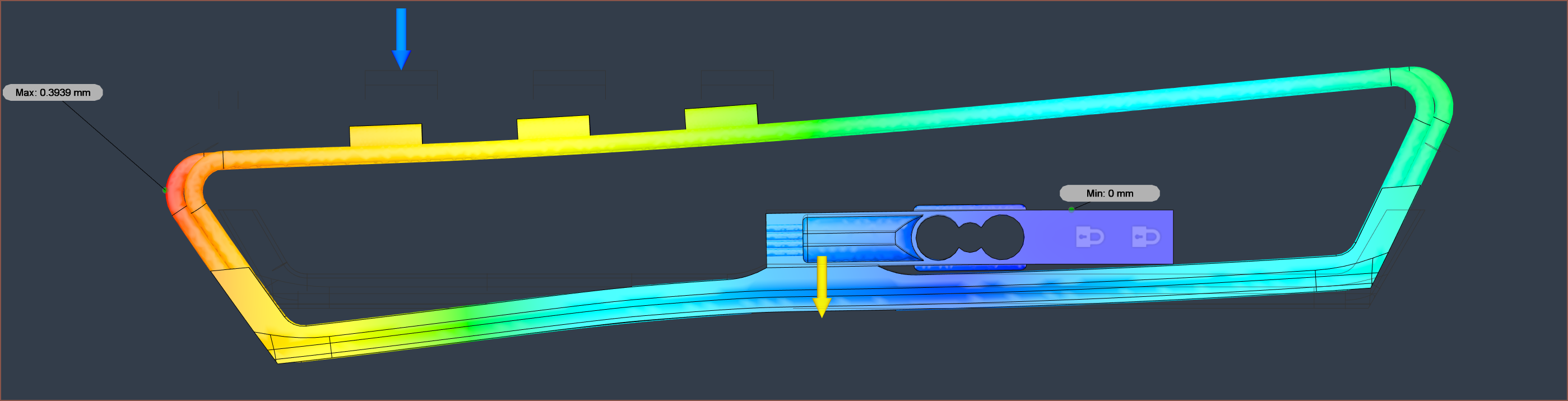
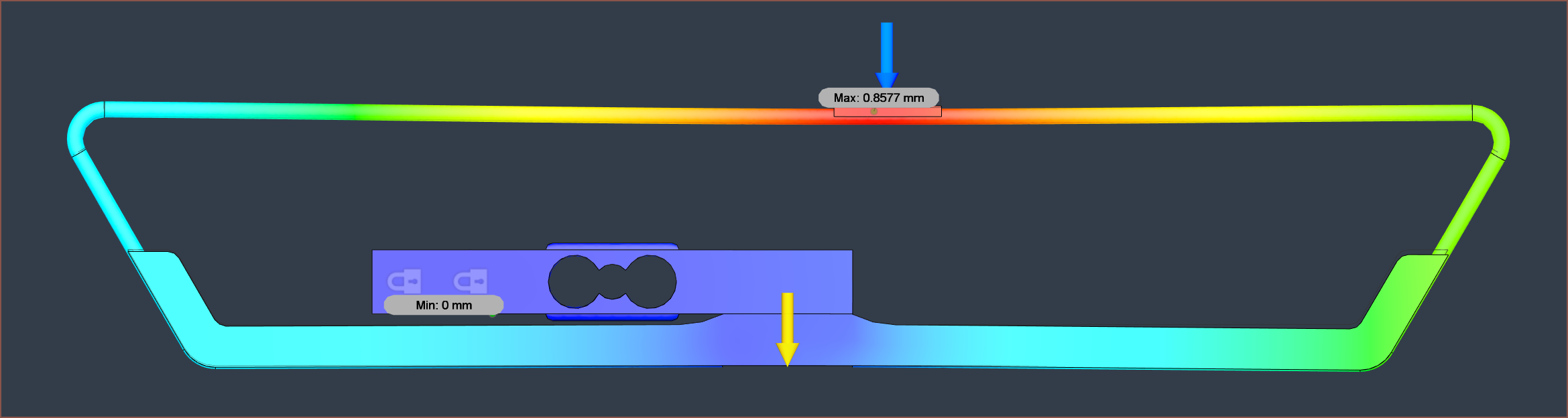
Interestingly, the displacement is still 0.86mm when the force is applied directly under another Tetrinsic, but the right side is greener than the left side. Green means over 0.4mm of displacement.
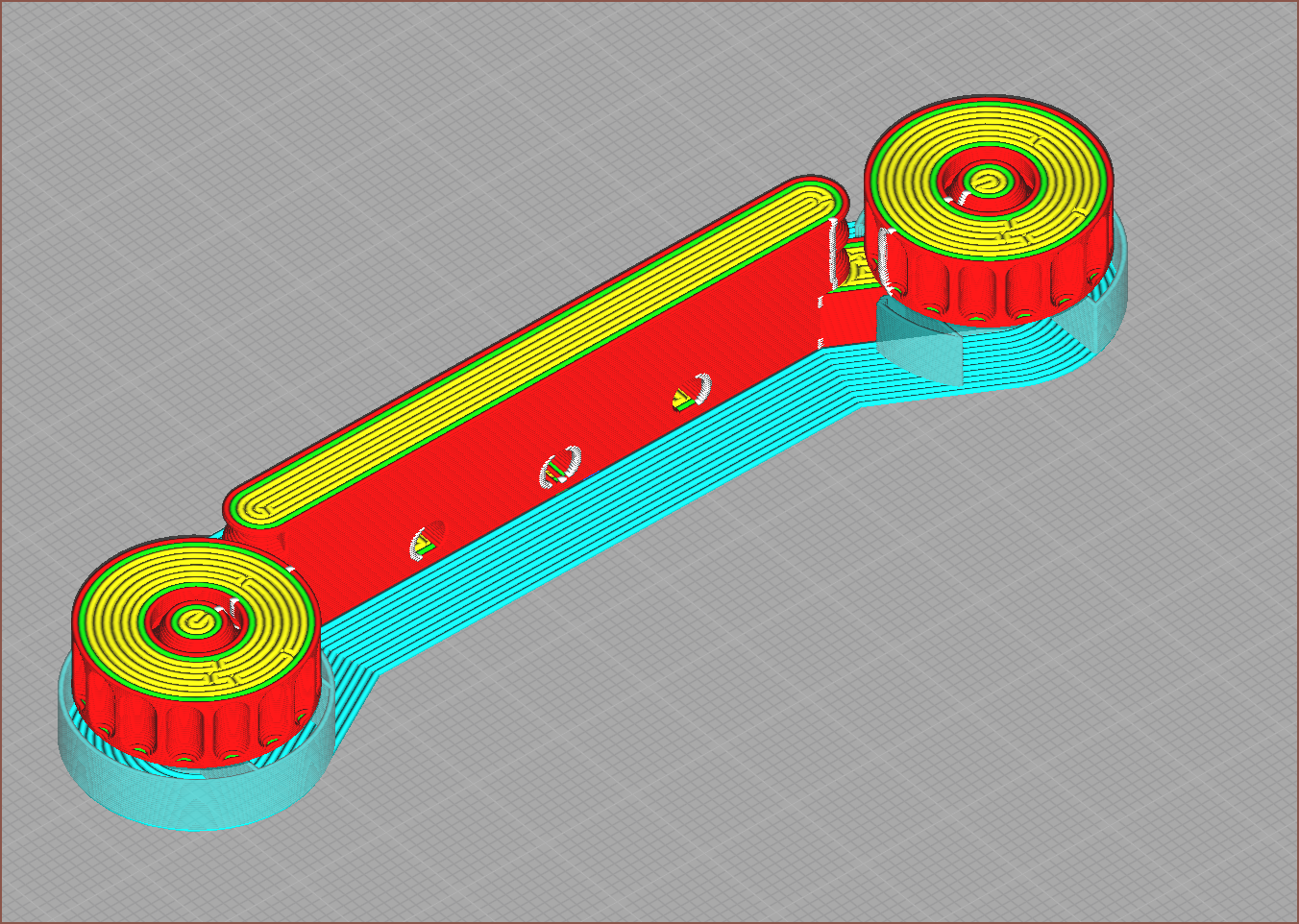
The displacement is more balanced with the uncentered cutouts. I probably should go with the other solution, whereby the collector is on the "outside" of the loop.
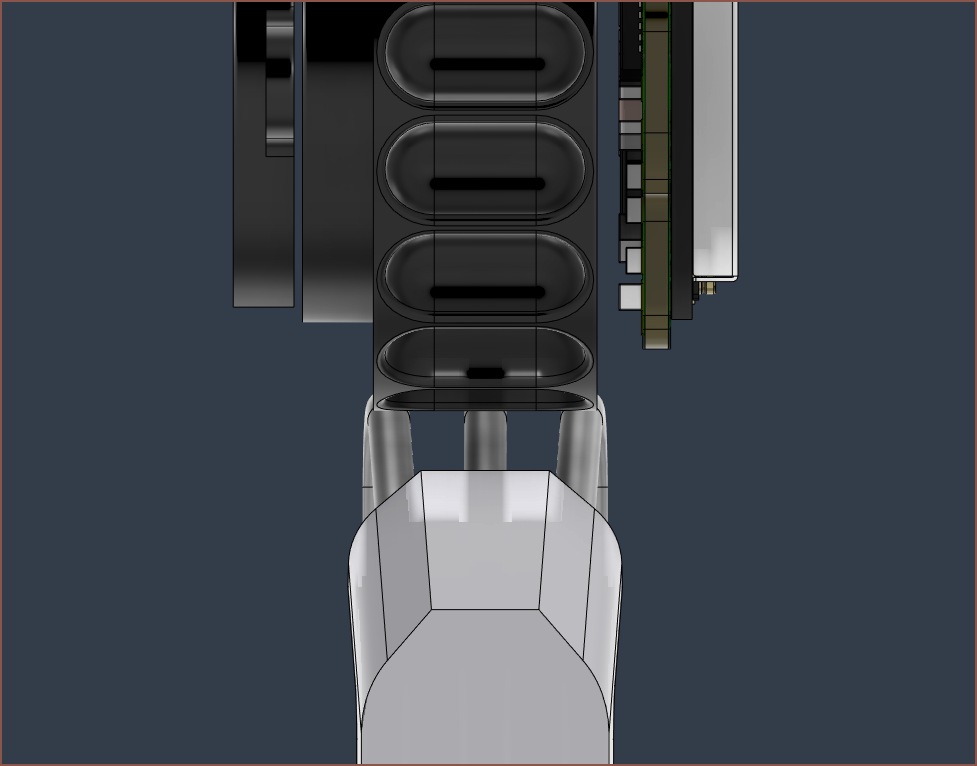
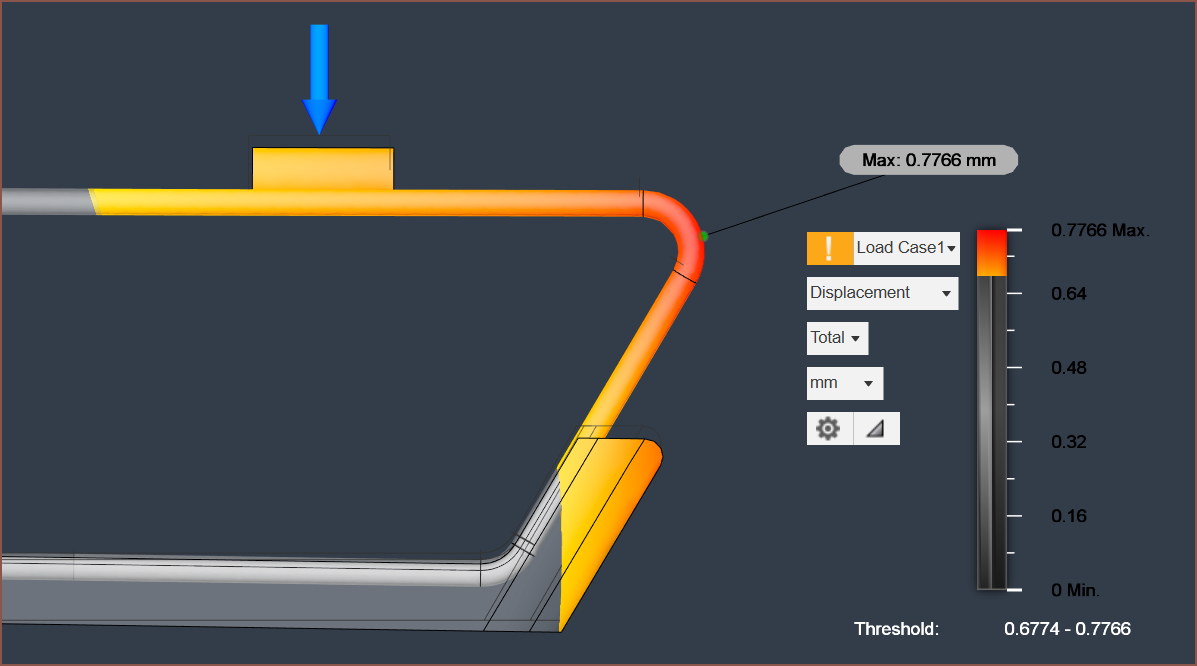
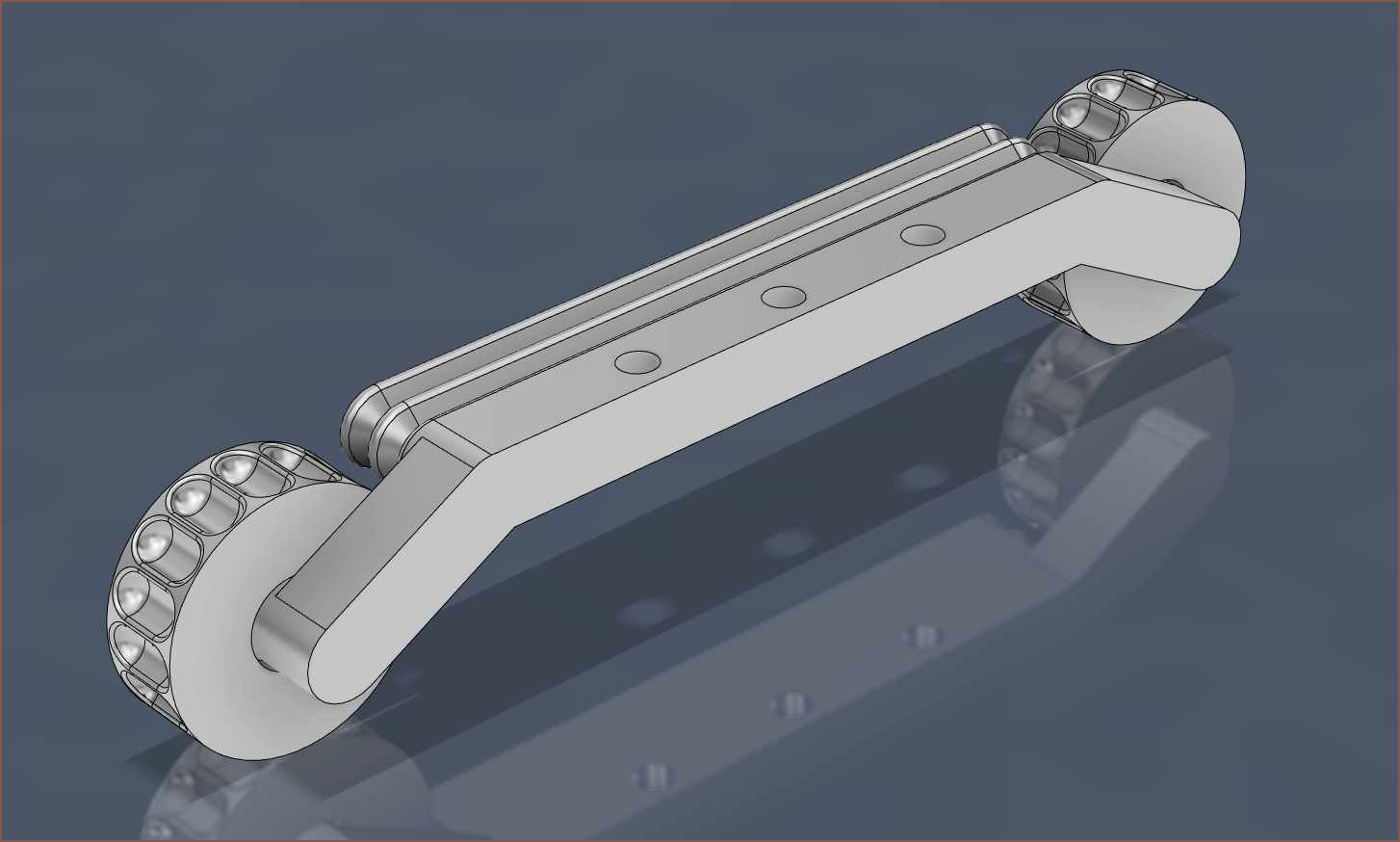
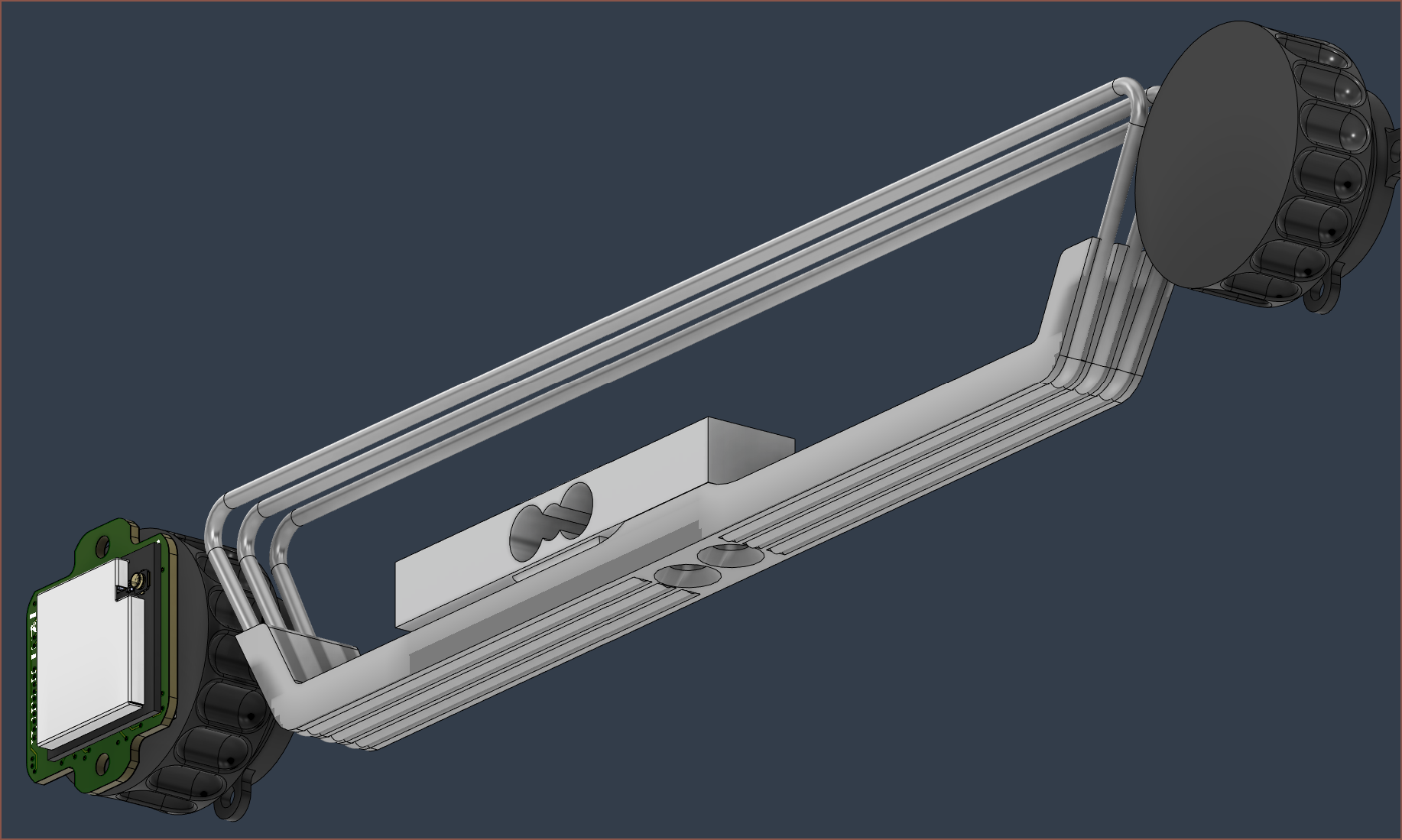
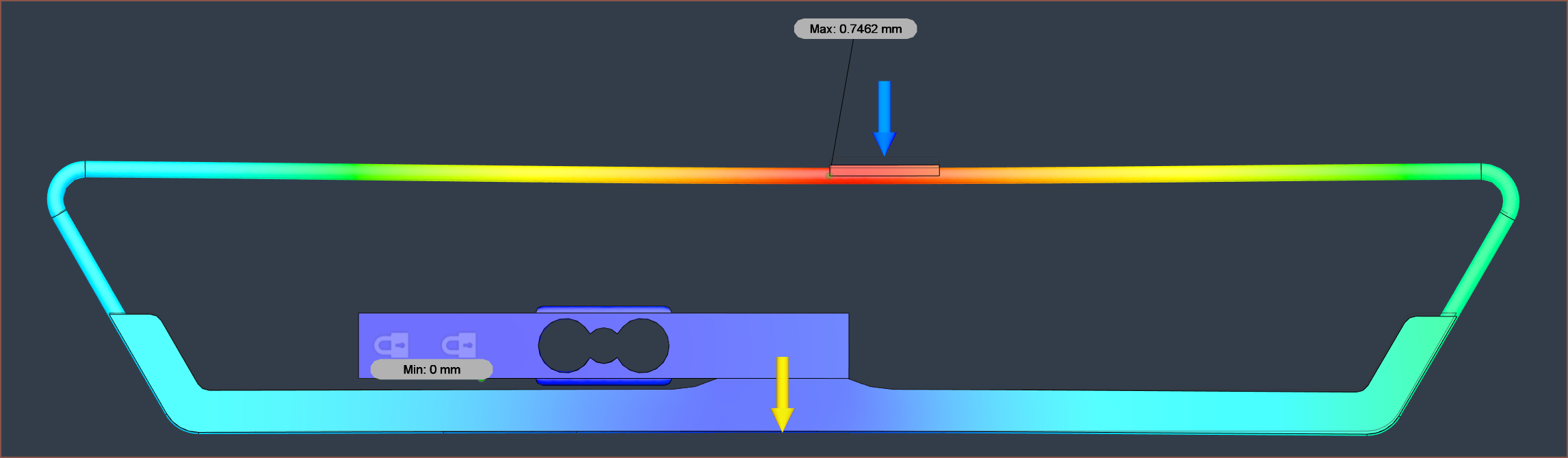
So this is it. It certainly looks more complex. The main benefit of this strategy is that the finger force pushes the tubes further into the collector, instead of pushing the tubes out of it.
The main drawback is that the ball chain will have to slide over plastic to be moved out of the way. At least, that was the drawback I thought of when comparing the two strategies before I started modelling. Due to the way I designed the first collector, the ball-chain would still rub against plastic.
Another benefit is that, similar to a boat through water, I can print a seperator that splits the dual chain.
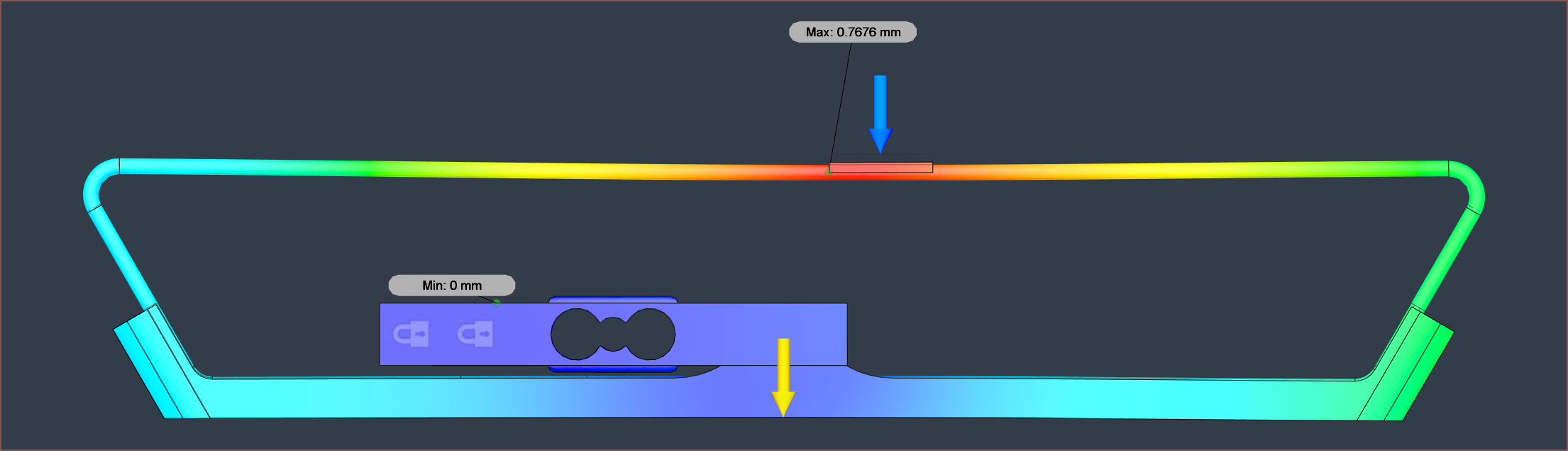
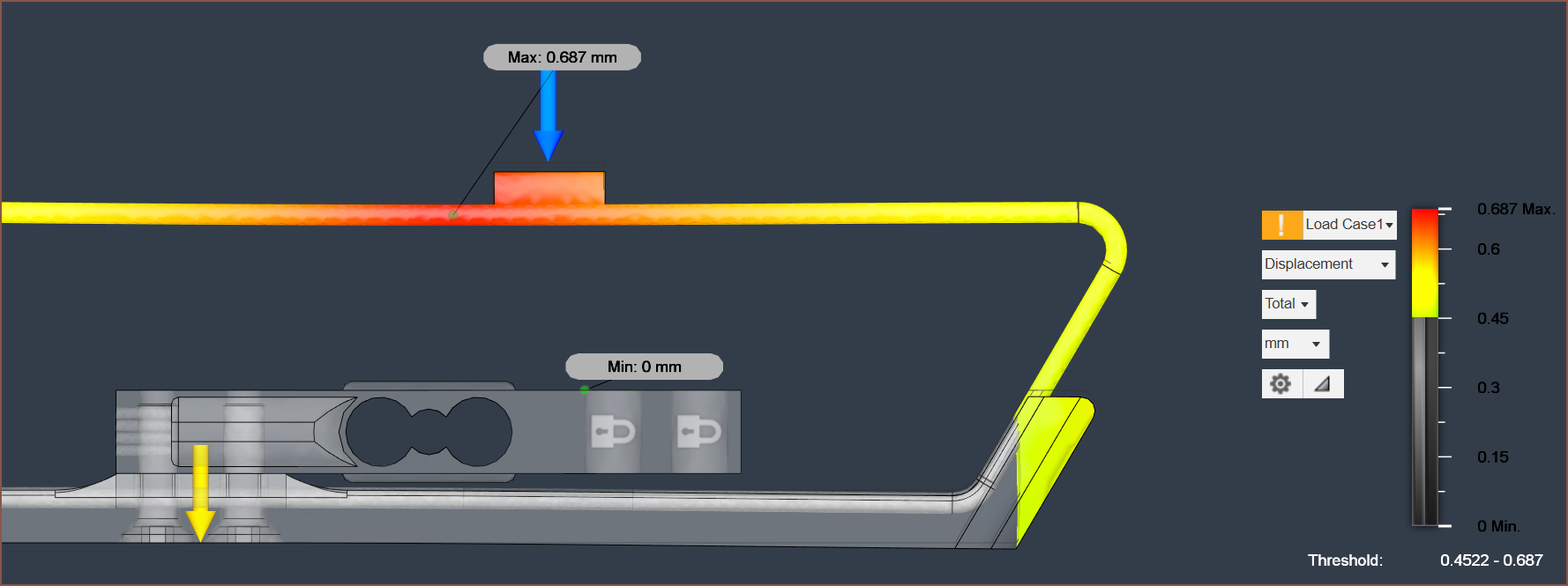
With this, I get a max displacement of 0.77mm and the base has a displacement of 0.34mm.
Considering print orientation, it's probably best if this face was horizontal instead of perpendicular to the tubes.
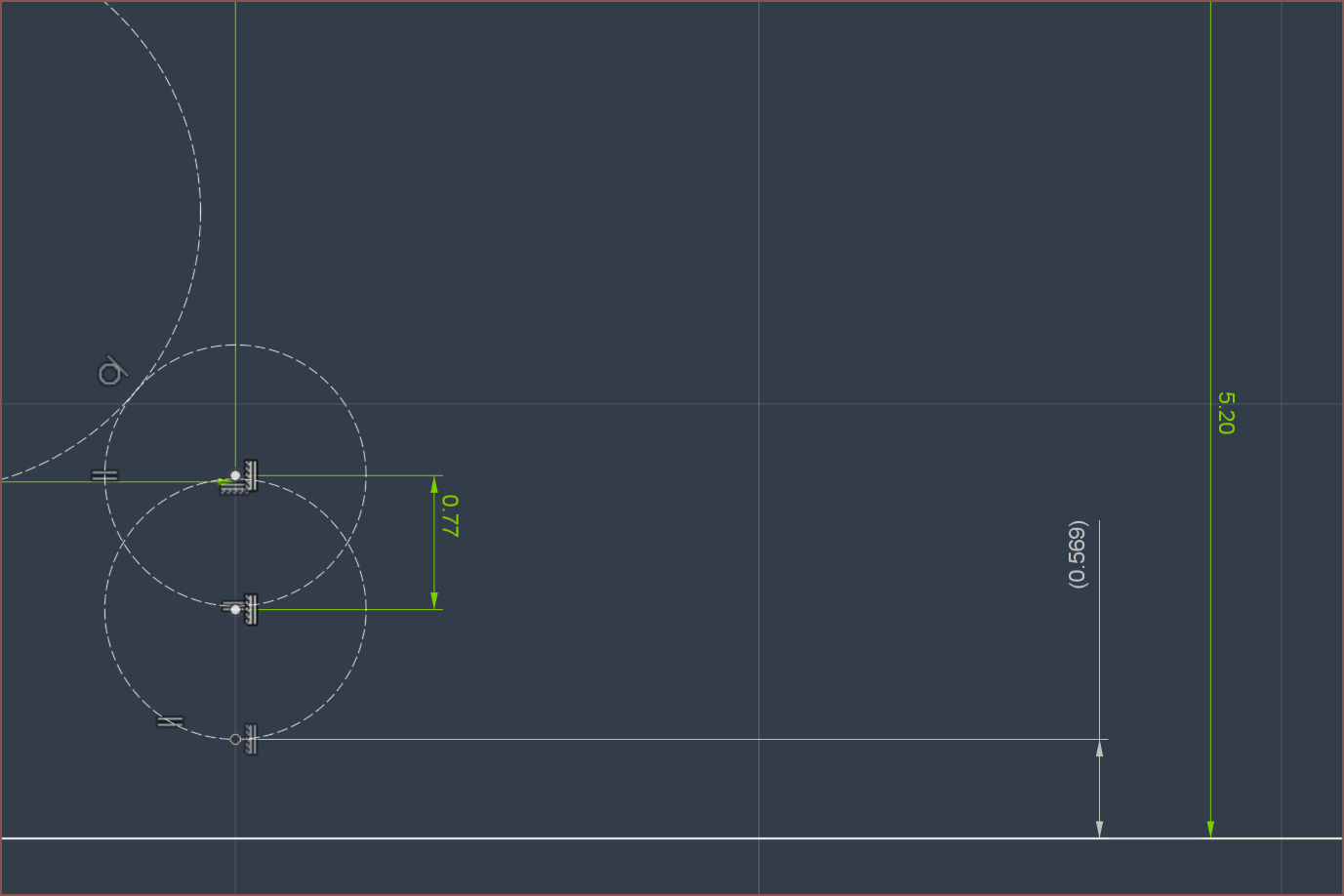
it seems that a height offset of 5.2 - 5.5mm would be required:
As will M3x10 countersunk screws:
So these bolts were actually causing the simulation to fail until I did a combine-cut to eliminate the geometric intersection between them and the load cell.
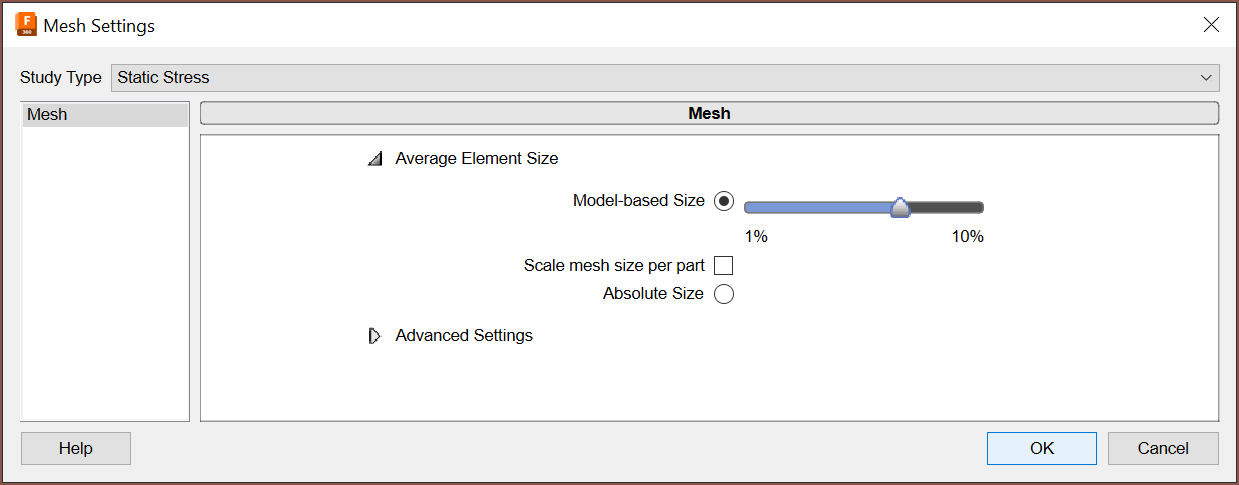
Now, for some reason, trying to simulate forces from distances over the 9.3mm set in the above simulation caused the simulation to fail. I tried a few different things and red the error logs, and I've been able to get a 25mm force sim to succeed by reducing the mesh setting to around 7%:
I simulated 50mm, and for some reason, only the "Displacement" view is glitched:
45mm worked though:
It does seem that I should also have a 0.75mm spacing below Tetrinsic to allow for this part to flex uninterrupted.
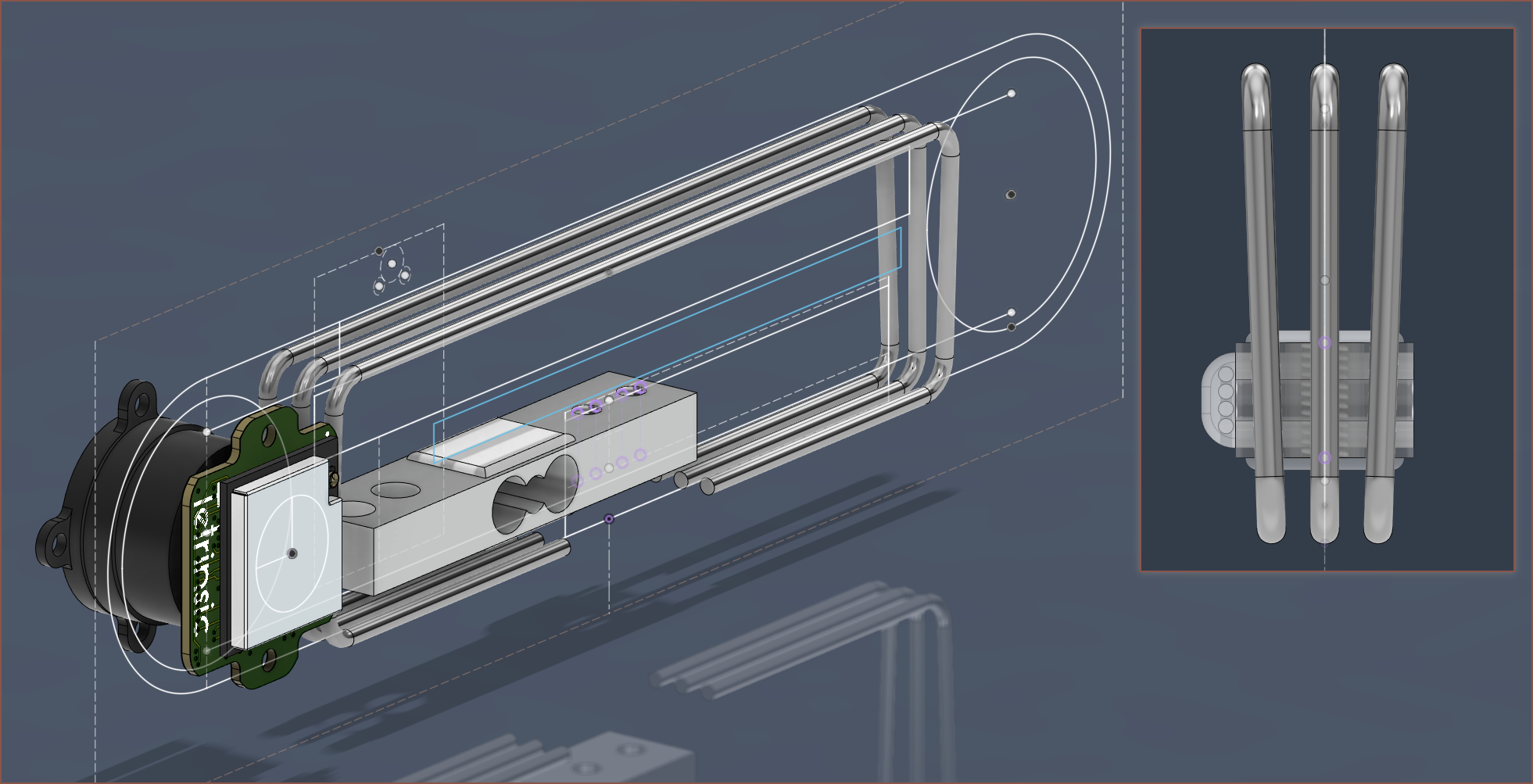
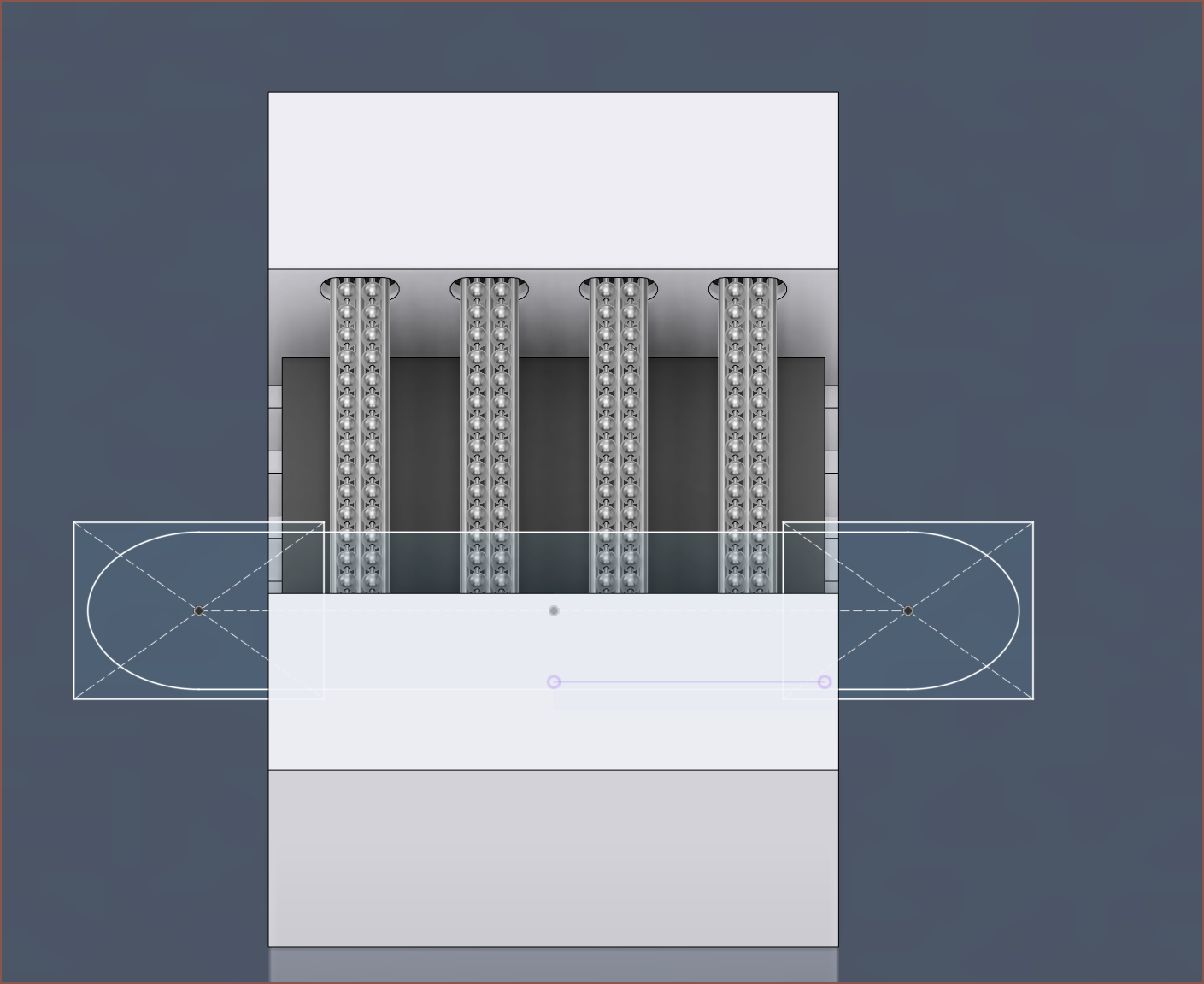
It's not much, but it should give you a slightly better idea on how everything fits together. It seems that I've sketched the mirrored version of what I intended.
Also note that the bottom of the steel tubes are slightly closer together than the top, This is to give the ball-chains more space. The angle is only 2 degrees, which isn't significant enough to have 2 slightly different bending jigs. It's possible that I increase the angle should I need more space, but right now I've kept a 1.2mm gap for the walls of the printed part that holds these in place. The tubes also act as reinforcement for this printed holder.
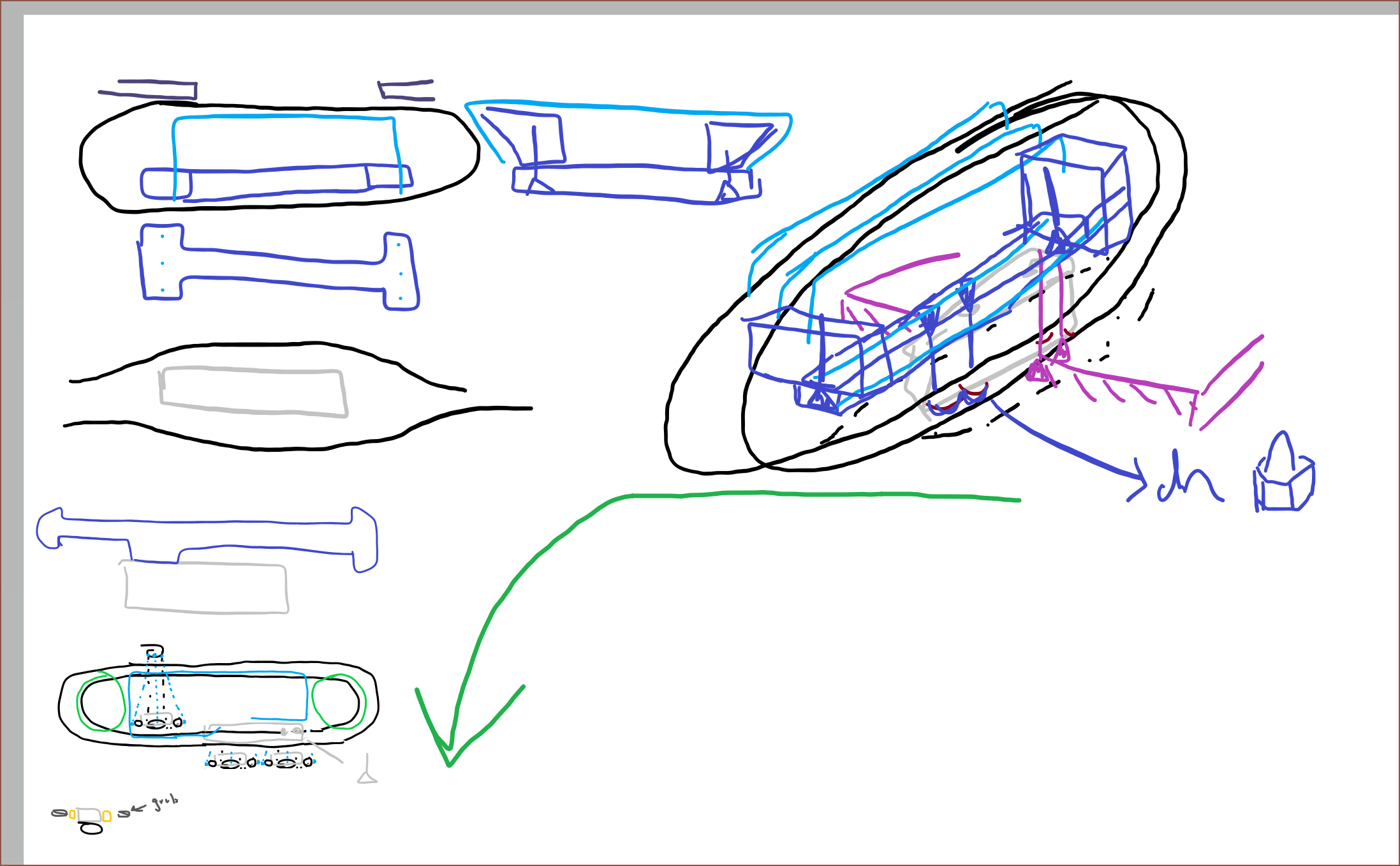
Since this new Tetrinsic now has 3D geometric considerations to uphold, I was having trouble thinking about the solution. Thus, I decided to create some rough sketches of the problem in Paint3D. Being able to digitally sketch to help solve problems is the main reason behind the Sketchθ mode in Tetent.
Initial Drafting
The design progression follows the green arrow.
Basically, it was a bunch of drawings to figure out what could and couldn't go where, as well as making it easier to see how design decisions would propogate.
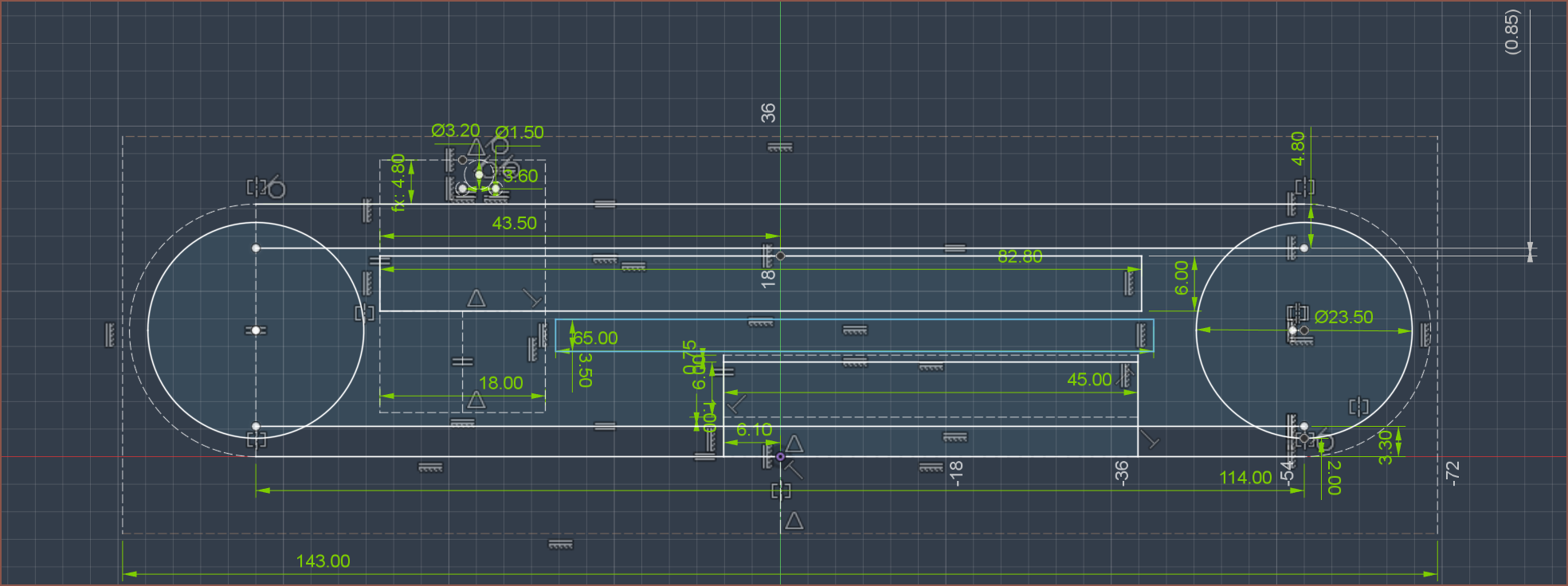
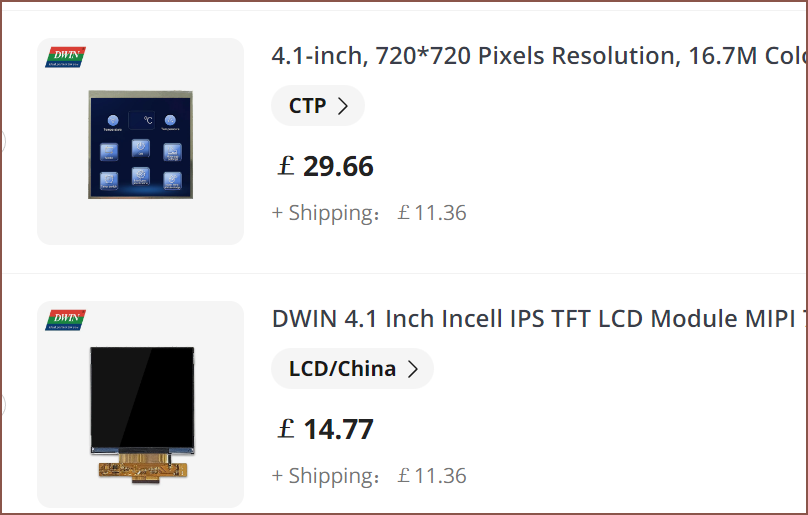
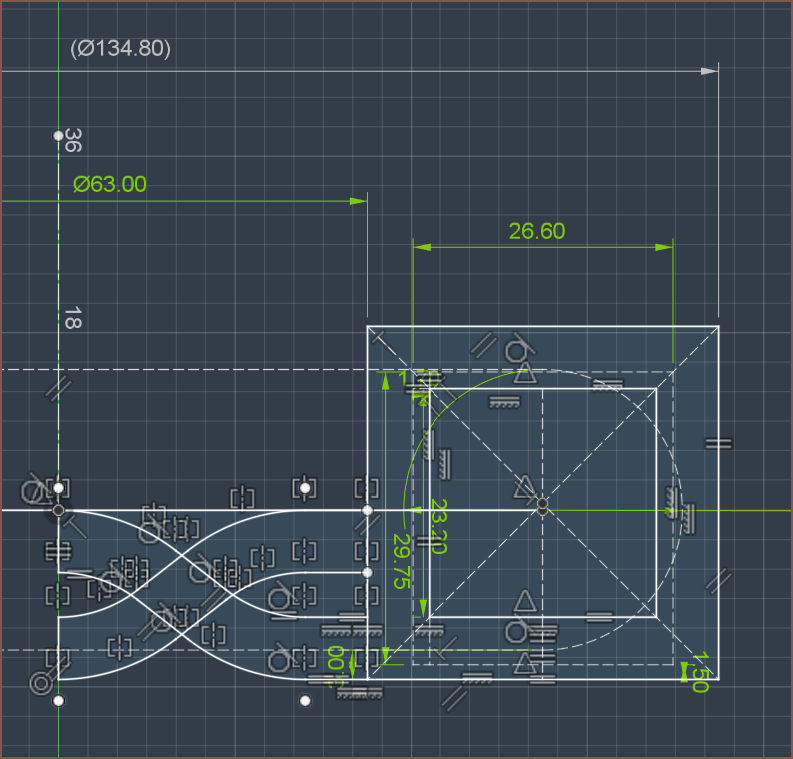
Once it seemed that I had an idea that could work, I continued the sketch in Fusion360 where I could get accurate scaling. It seems that 4.8mm is a good starting point as a Tetrinsic offset. I'm also planning for space for a 4.1 inch HMI, since it's almost the same dimensions as the panel by itself with the main difference being thickness.
As explained in this log, I believe the HMI is the best solution but it's also the one that uses the most space, thus if I can accomodate this display, I could later decide on going with any of the other solutions discussed instead.
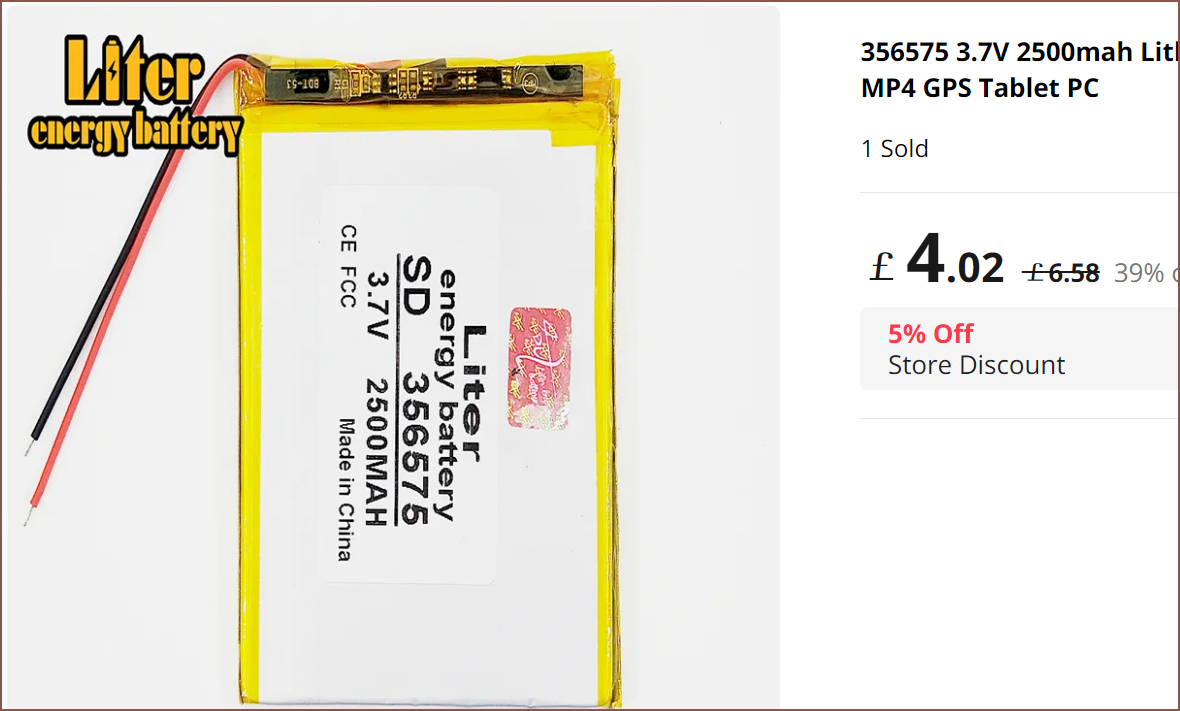
In the free space available, I've found this 356575, 2.5Ah battery:
To allow for enough space, I've gone with 17 teeth sprockets. The total height is thus 27.5mm. That's the same height as the TestTetrinsics I printed.
Starting yesterday, I've been conceptualising a way to get a fifth Tetrinsic to fit.
One of the ergonomic issues with Thumb1 is that it and Finger5 are both what I'd call "aligning fingers". As one would expect, the solution ergonomically fails if only one of them is in alignment. That's part of the reason why the main Tetent concepts have only used 4 fingers:
Left: Concept4, Center: Concept3, Right: Concept2. Wow, the 4th concept sure looks more futuristic than last years second concept.
Unfortunately, any ergonomic solution failed geometrically due to the size of Tetrisic. #Tetent TestCut [gd0139] is no longer geometrically viable with how large Tetrinsic has grown now.
However, with this new idea that I talked about in the previous log, I feel that there's a possibility of obtaining one of the best ergonomic solutions possible whilst still being ergonomically viable, though it could be harder to manufacture since a closed loop would form around the FingerN Tetrinsics. The good news is that I can make it ambidexterous without needing an additional Tetrinsic, now that it's so long.
This strategy actually goes all the way back to this log here where there's even a handy diagram. Right now, I'm targetting a height offset of 6mm. Conveniently, the 1.5mm stainless steel tubes arrived. 1 tube alone already feels unmoving, so the 3 tubes that make up the sliding surface of Tetrinsic should be stiff enough for the task.
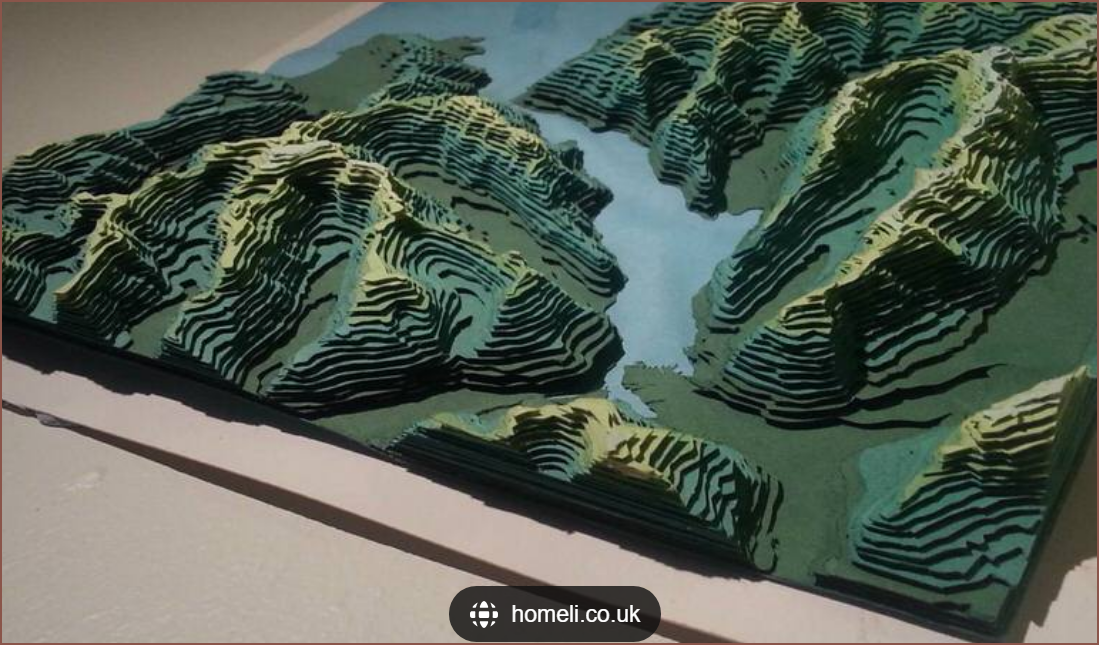
I'm also removing the LCD/Solar stuff from Tetrinsic. I'll still be keeping compatibility by exposing pins on Tetrinsic PCB, but it now seems that the aesthetic should be determined by the device that Tetrinsic is implemented in. For example, why have a small artisan keycap when the entire free area could be one, such as a topology map:
At the moment, I'm expecting the visible area to be about 75mm x 75mm for Tetent. This approach to lighting has come full circle, as the Tetwin Switches were designed to be transparent so that an external light source could shine though.
So, unfortunately, with the expected size of Tetrinsic, it's looking like a possible Tetent solution would be very similiar in dimensions to an AirBerry (my Let's Split keyboard), just rotated 90 degrees such that it's 6 rows, 4 columns instead of the other way around. I was imagining something like this:
It's... fine... simple yet modern... but it's not exactly the kind of device I hoped to get out of 19 months of R+D work.
However, just after writing about the linear motor research in the previous log, I thought of what a new Tetent could look like with one and thought of sometihng similar to this:
But then I remembered that a) the ball-chain of the current Tetrinsic runs on a stainless stainless steel tube, b) that tube is probably stiff and c) that a good part of the proposed Tetrinsic is empty space on the bottom half. Thus, why not turn the concept up-side down and bring back some level of future-modern, Apple-esque aesthetic that I'd expect to see on Yanko Design?
The most notable benefit of this is that a larger, single display could be used. However, as a larger screen means more pixels to drive, I'll most likely be sticking with the 2x 1.14" LCDs. Additionally, the only OLED I could find, the 3.8" one I was planning to use for #Tetent TimerSpy [gd0136], actually has poor black levels in ambient light. I can clearly see the difference between "black" on the OLED and the black bezels from this video
Another notable mention is that this extends to any material, such as a photovoltaic cell or a porcelain tile. Lastly, a benefit is that the pressure plates won't be right next to each other, meaning that I could actually have the Tetrinsics closer without worrying about manufacturing tolerances.
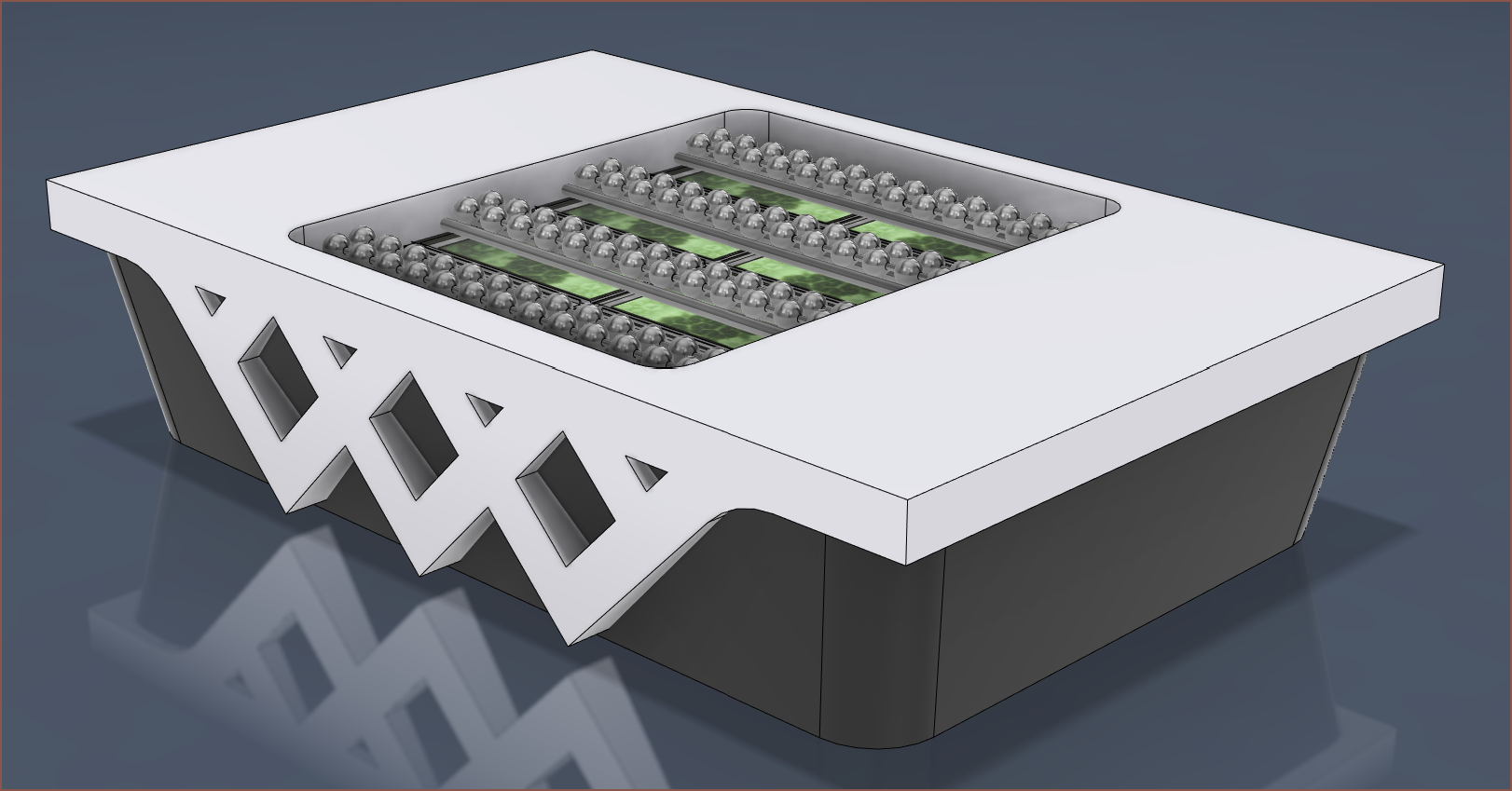
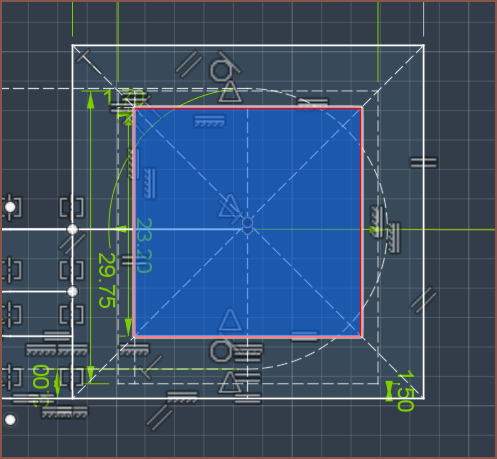
The next Tetent concept is currently a work in progress, but this sketch (which is one half) should give an idea as to the strategy I want to try. For starters, I'm thinking that the squiggly bit is where I could have a fancy design on the outside. Behind that, on the inside, it's where the load cell, battery and top screen would be. The square (highlighted below) is where the memory LCD would go, and the motors behind it.
Hopefully, this strategy makes the resulting Tetent designs look more futuristic, even if I might not be able to make Tetrinsic as thin as I'd like.
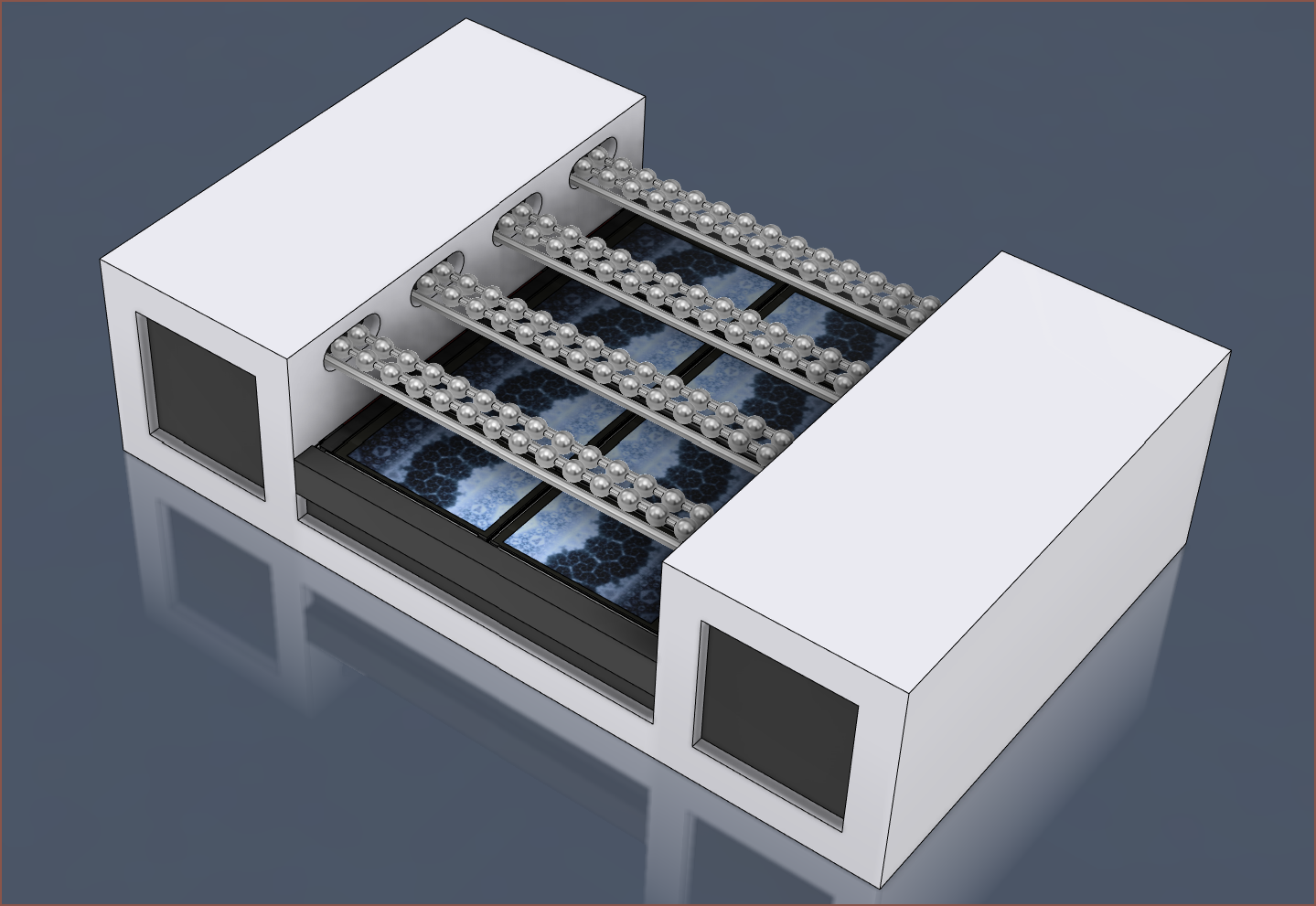
The 3D of the above looks like this, though I'll post updates on the overall design in the Tetent project:
At this time of writing, I'm still going to go thorugh with the soon-to-be-designed dual motor Tetrinsic, but I'm still not happy about the length and height of the current solution. While the active length of 63mm makes sense as all 4 fingers can ergonomically exist in the resulting quad-Tetrinsic area, it only accounts for 54% of the total length. The thickness of 28-29mm is also limiting, and ideally Tetrinsic would be half this.
Other than width, the main ergonomic issue I need to engineer for is to obtain reliable fingertip grip whilst having a very low friction sliding surface, even when pressure in excess of 100gf per finger is applied.
To have a chance of meeting an under 15mm thickness target, a potential solition is to give up infinite-scroll and off-the-shelf hardware for a custom linear motor:
Unfortunately, I think the bigger issue is developing the software for Tetrinsic and mounting strategies, so right now I need a development solution and not an ideal solution.
[13:00] Now that I've got a sprocket design that seems to grip the chain and I know what tolerances are likely acheivable, I started thinking about a possible test print I could use for a TestTetent. After letting my mind brew on some ideas over a couple hours, I'm going to first try and see if I can get something usable without any moving parts at all, and just have the ball chain slide over all surfaces.
The bottom has 4 M3 holes that are spaced 48 x 12mm apart, as I'm expecting the redesigned Tetrinsic to make use of integrated nuts in these locations. The holes in this model are self tapping since it's not like these test prints are going to be permanent.
The print is also 18mm thick, just like the expected real Tetrinsic.
While this concept is the largest yet, I'm hoping that there would be enough space for a thin battery that fits in the space available when 4 Tetrinsics are colinear.
[14:30]
The solution... failed.
I printed out the first attempt and I was able to get the chain on but it was extremely tensioned. This was using 0 TensionOffset. The next print, which used 1.2mm TensionOffset, was suprisingly still tensioned but more manageable than the first attempt. The end-to-end length and height are 115.25mm and 28mm respectively.
The main issue with this solution is that the chains are free to independently slide, resulting in reduced comfort. Additionally, the friction resistance is quite high.
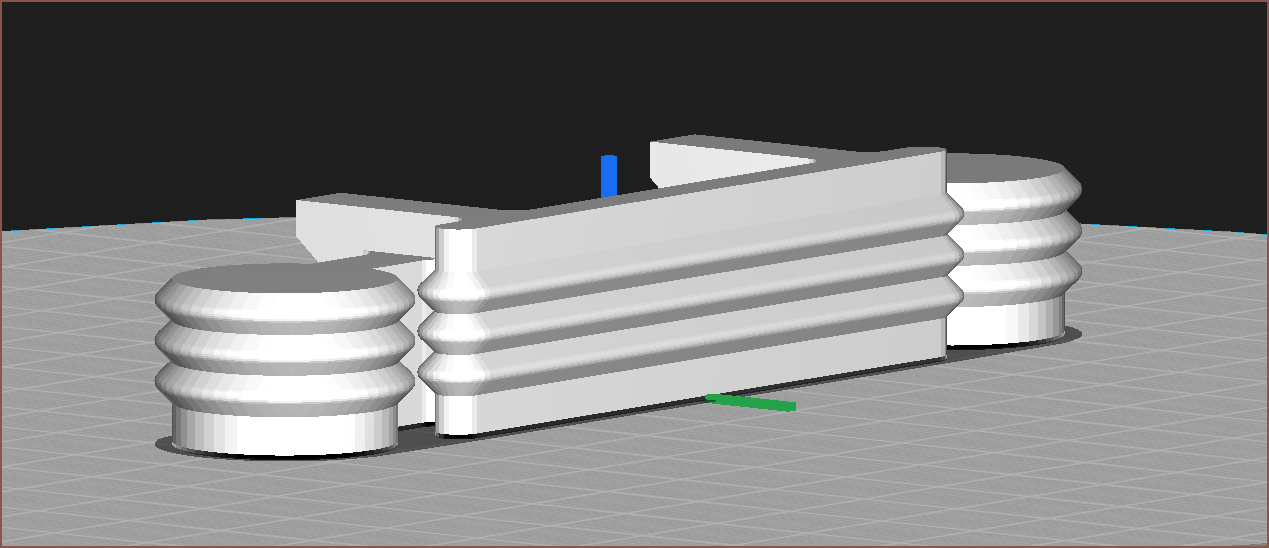
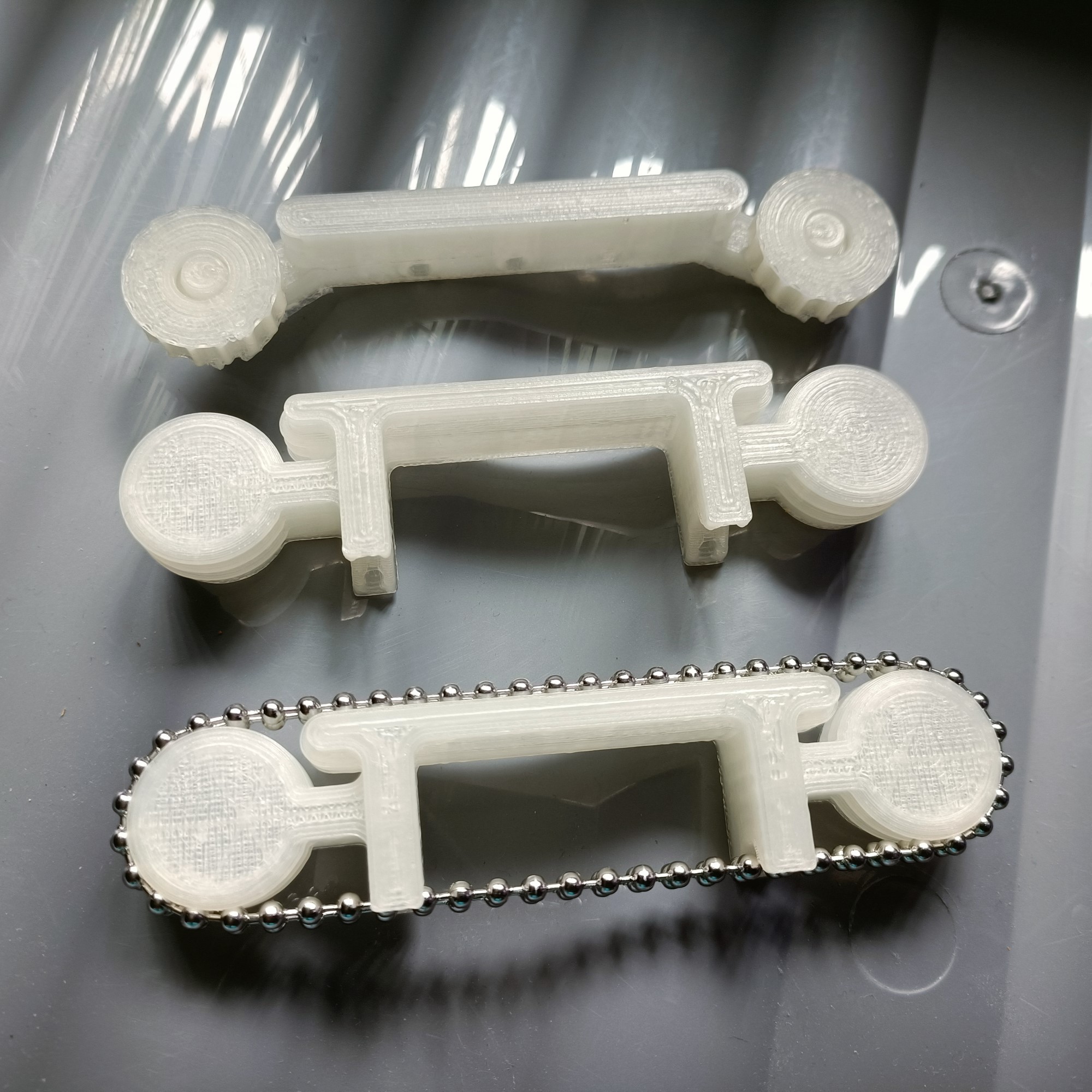
[15:45] I've designed this print-in-place test part to obtain the correct chan fit before I start redesigning the main file all over agian. I'm also going to design for a less ambitious 4mm internal tube bend instead of 3mm as in the main file.
The hope is that I can subsequently print multiple of these and then test ergonomics of possible Tetent designs.
[17:00]
The first print is welded together, but it does seem that the first try tension equation of:
SprocketDistance = 20 * BallSpacing
has worked out ok. For a ball spacing of 20, there are a total of 21 balls between the tooth of the first and second sprocket (a.k.a 19 balls floating in air and 2 balls in contact with the sprockets). In the next print, I'm thinking of trying
SprocketDistance = 20 * BallSpacing - 0.2 mm
in an effort to aleviate any excessive stresses, as right now it's as tight as a tensioned GT2 belt. Not sure if that's good or if it'll mean I have issues with friction yet. This model has a length of 116.2mm, so I'd imagine that the final would be 116mm or less.
When I attempted to create the chain loop, I actually had one too many balls in the chain so I respliced it. Even though there are 2 reformed balls in the chain, it still seems sturdy enough. I'm not sure if this is just a limitation of the tool or another "Used, Like New" problem, but the ball dies on the Maun 5066 don't acutally meet and so the ball isn't completely closed.
[7 Aug: Edit 1] It has been identified by the seller as having a manufacturing fault.
[/Edit 1]
This time, I'm going to print this upside down to see if I can avoid first layer squish issues:
If anything, it'll give me a chance to improve my support settings.
[18:20]
Shame how Tetrinsic is turning out longer and taller than I'd like.
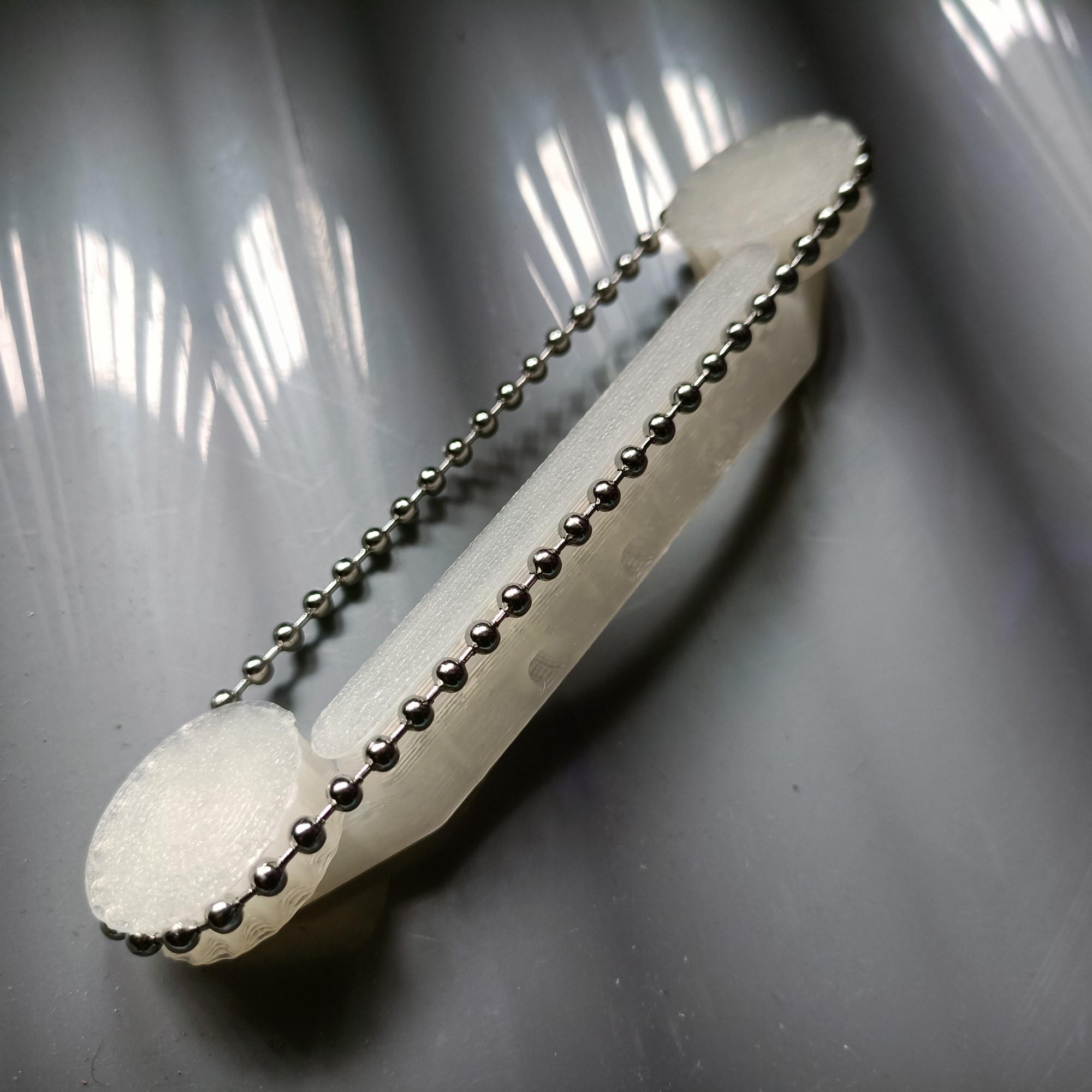
As expected, the undersides of the sprockets are rough, but it actually spins now, albeit with quite some resistance. The full length is now 115.7mm. Now to figure out how much of an offset I can get away with.
The sprocket with the ball chain is 26.2mm, the sprocket by itself is 22.0mm (it was modelled as 22.2mm).
The full length without the chain at all is 111.8mm, though it's supposed to be 113.0mm.
This can be explained to the looser tolerance, as the first attempt was 113.4 modelled, 112.8mm on calipers.
The above 2 bullet points imply that the chain sticks out of the sprocket by approximately 2mm.
Not sure how relevant that number is to this calculation, but it's nice to know.
The chain is still taught on the second print even though it's 1mm shorter than the first one, so perhaps I don't need a super critical tolerance and can just design a fixed length solution.
It does feel slacker though.
I guess a refined equation is probably the equation below:
JLCPCB is likely to make the parts much closer to the CAD model than my Linear Plus FFF 3D printer, so that's what the "- 0.6mm" part of the equation is.
Since the first print was probably the max achievable tension and the second print is closer to the minimum, I'll assume that the range of TensionOffset is from 0 to 1.2mm. Thus, if I use an offset of 0.6mm, I'd have ±0.6mm of tolerance to work with. However, it's likely to be in my best interest to have a TensionOffset closer to 0 than 1.2mm.
Ok. Noted.
Another thing to note is that this design uses 56 balls a chain, but I have to cut 57 balls off the 5m length. Thus, the length required is as follows:
It's a good thing that stainless steel ball chain is relatively cheap. Shame it gets negated by the price of the splicing tool though. Hopefully there's some AliExpress seller that sells varying closed loop lengths of ball-chain similar to the many that sell closed GT2 belt lengths.
 kelvinA
kelvinA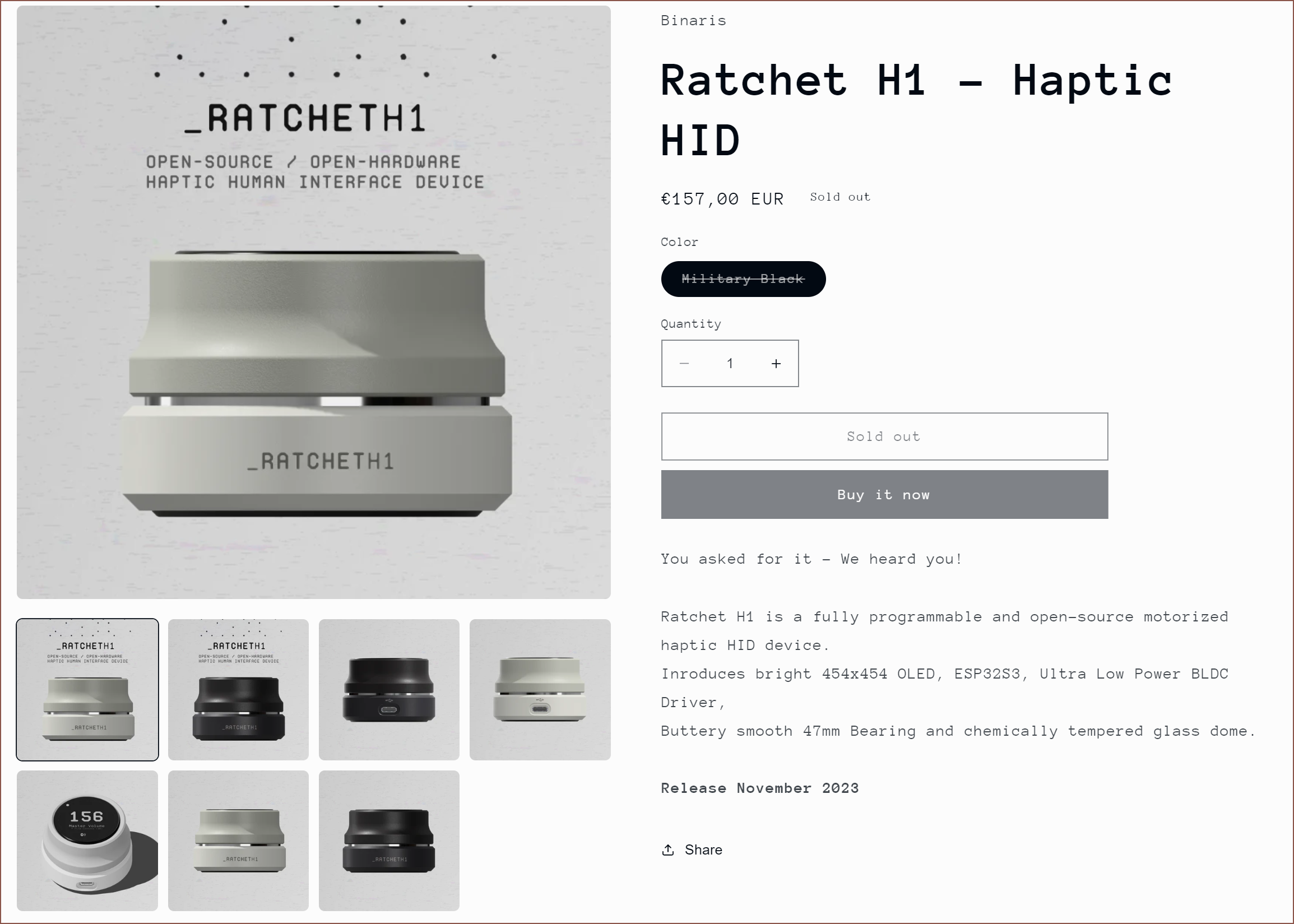


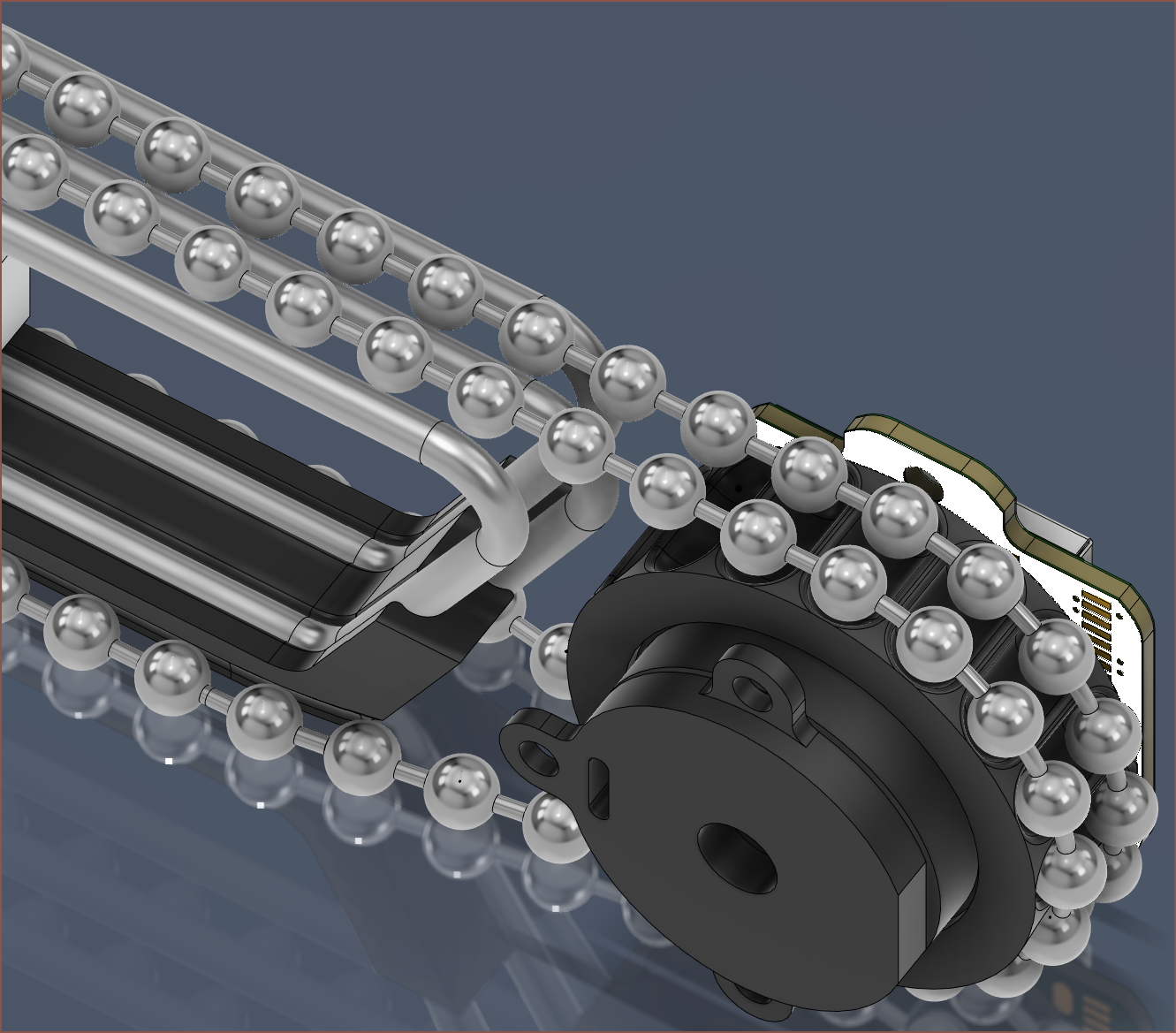





 The displacement is more balanced with the uncentered cutouts. I probably should go with the other solution, whereby the collector is on the "outside" of the loop.
The displacement is more balanced with the uncentered cutouts. I probably should go with the other solution, whereby the collector is on the "outside" of the loop.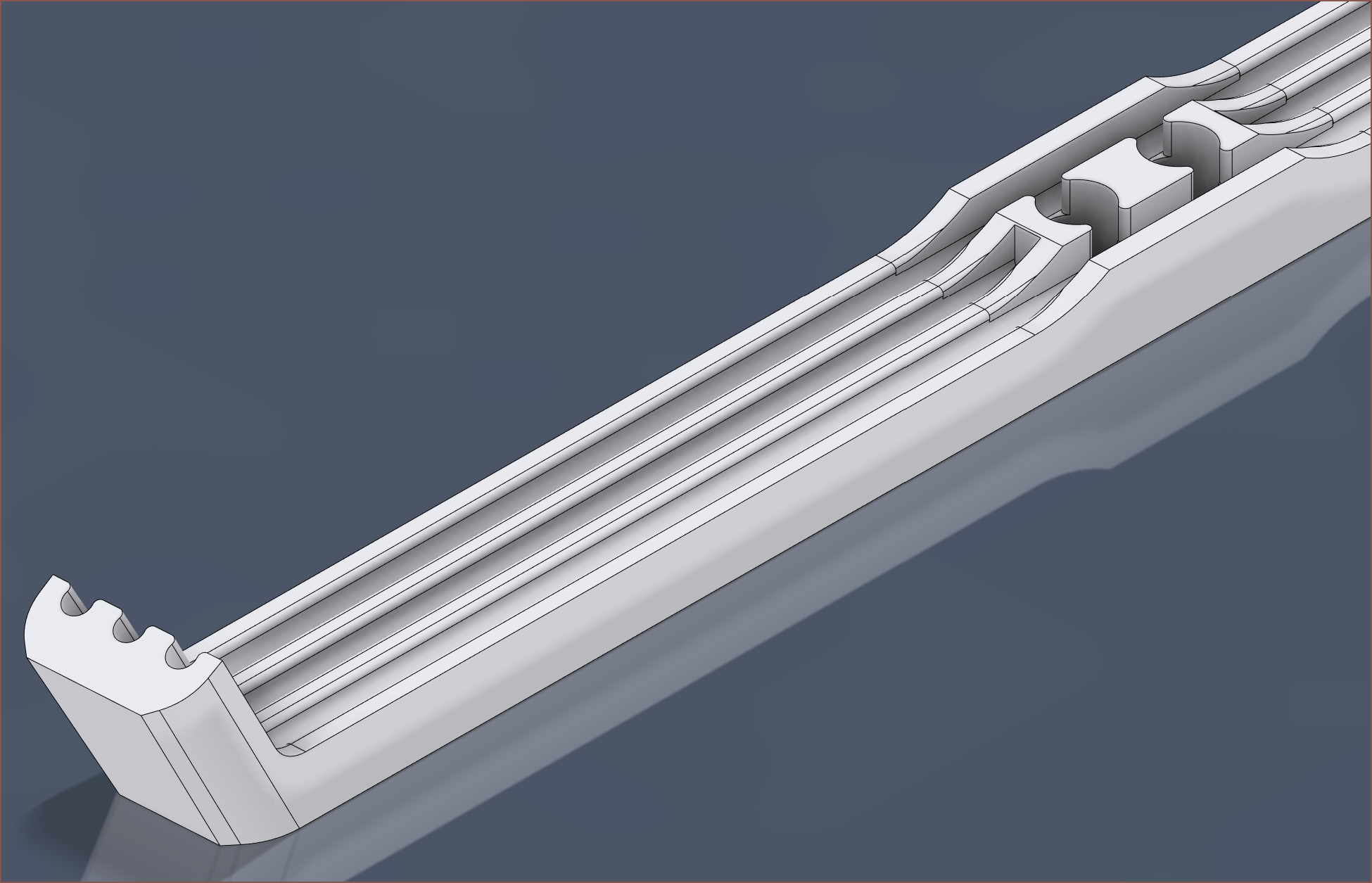 So this is it. It certainly looks more complex. The main benefit of this strategy is that the finger force pushes the tubes further into the collector, instead of pushing the tubes out of it.
So this is it. It certainly looks more complex. The main benefit of this strategy is that the finger force pushes the tubes further into the collector, instead of pushing the tubes out of it.