 Martin Pålsson
Martin PålssonFolkrace is a up and coming competitive sport with as many as approx. 10 competitors at the annual Stockholm Robot Championship.
Rules: http://www.robotchampion.se/wp-content/uploads/2013/10/Folkrace_2013_SRC_en.pdf
This is my first attempt at Folkrace. I started building this robot shortly after the last competition on November 2016, with my aim set at the Swedish Championship in the spring of 2017.
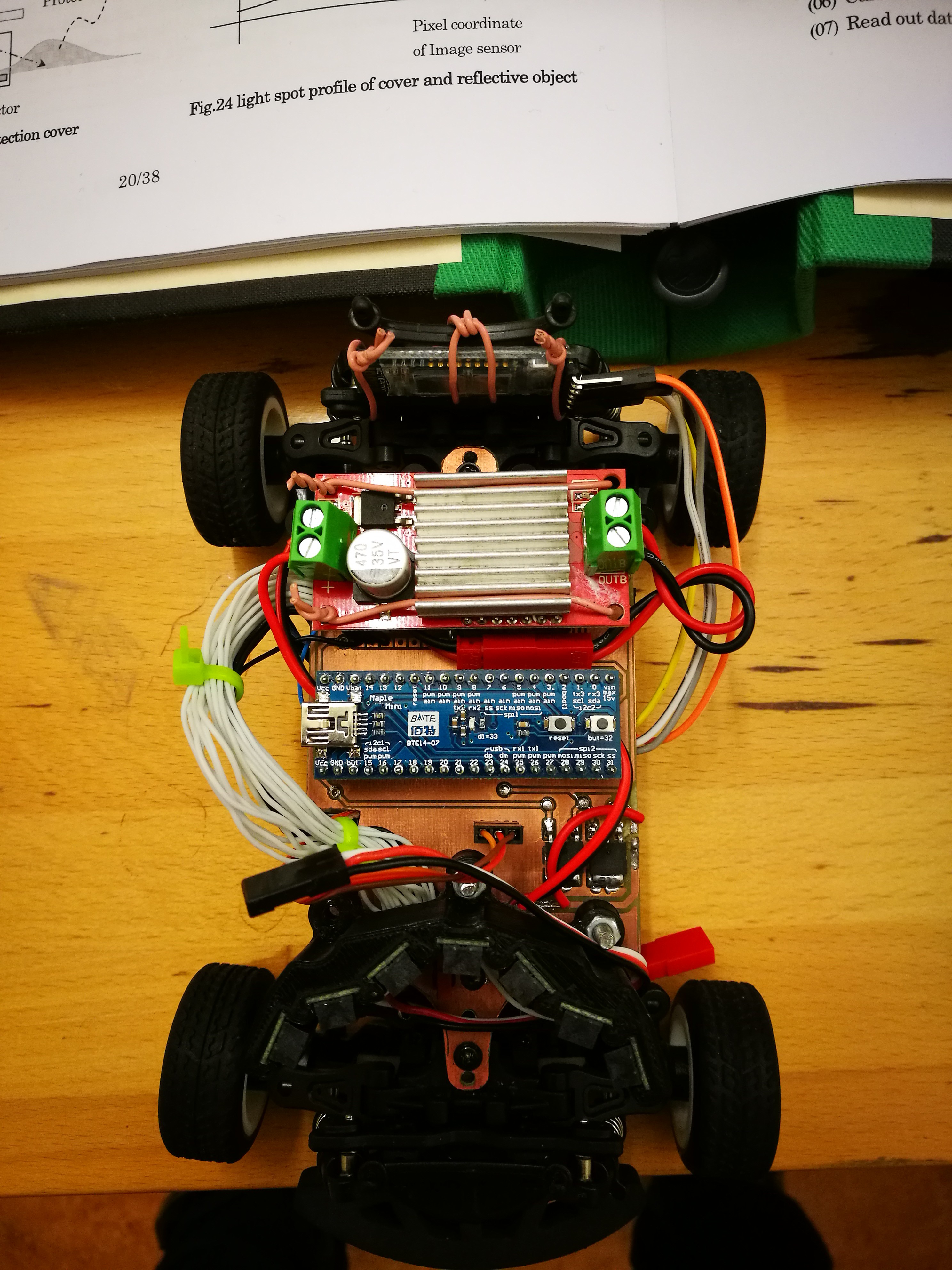
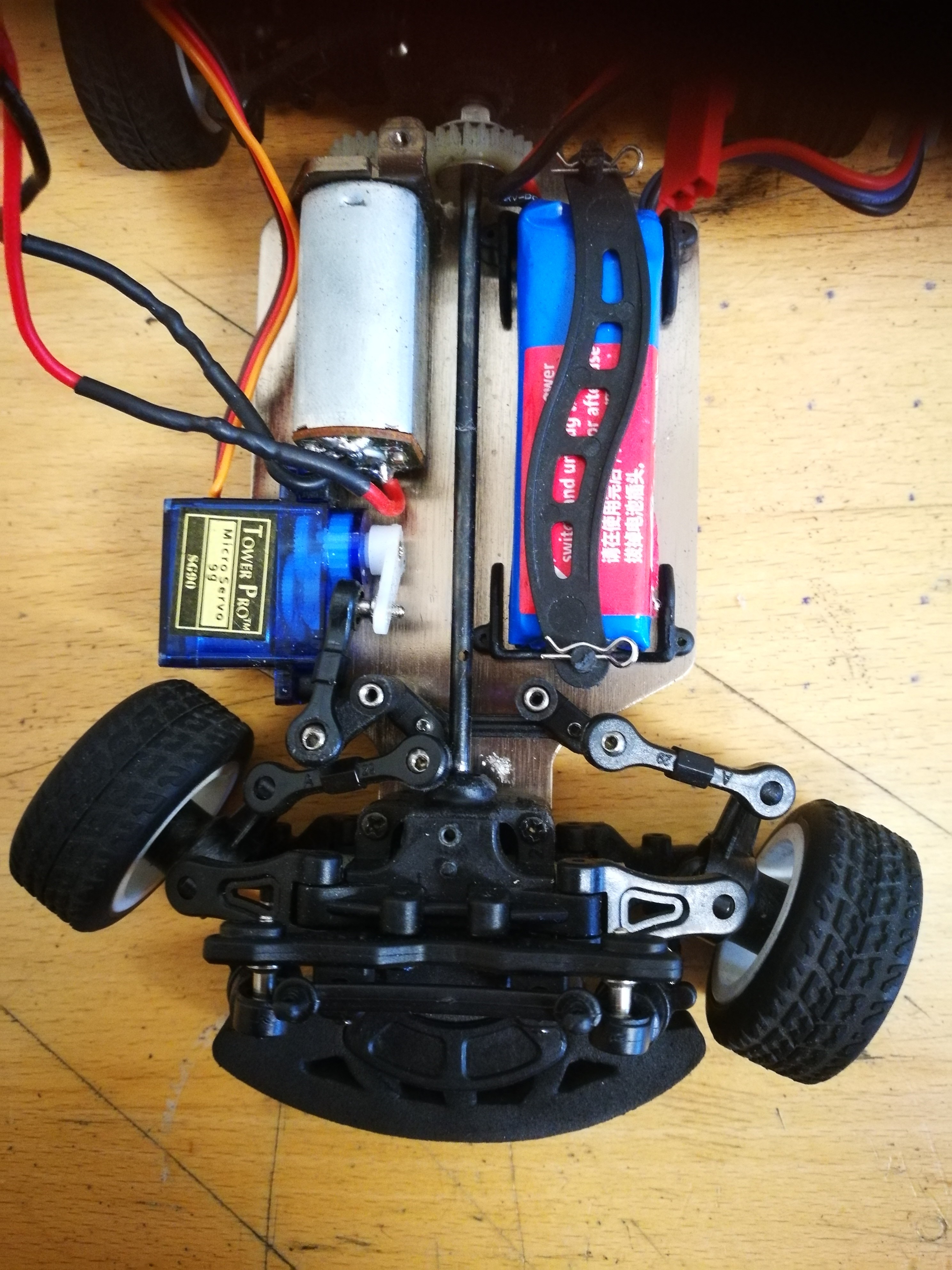
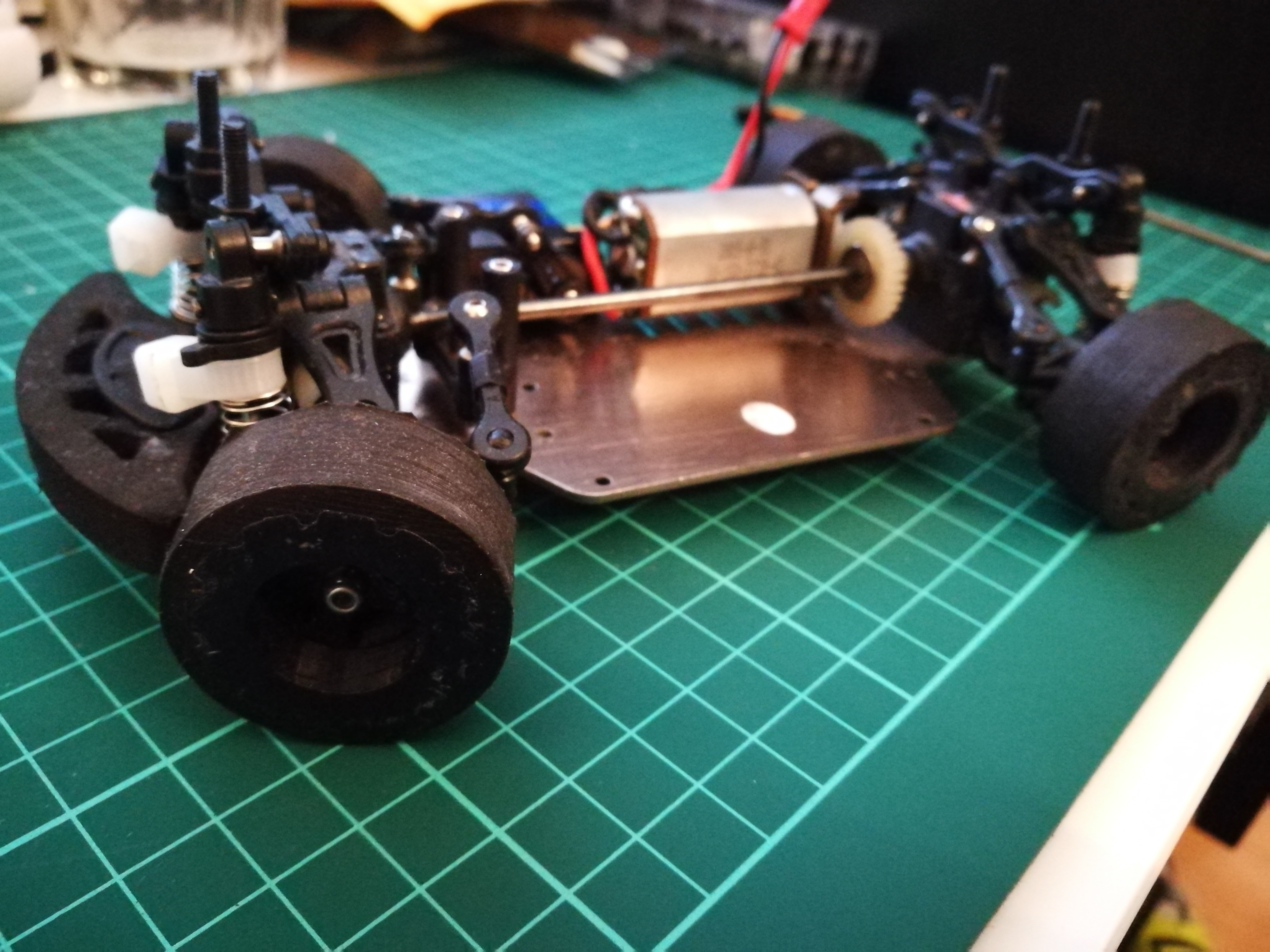
I use a WLToys A242 along with Maple Mini (STM32Duino), Sharp distance-sensors and a lot of brain grease to get the things together.
As I'm writing my first post here on Hackaday.io, the robot is already up and running.
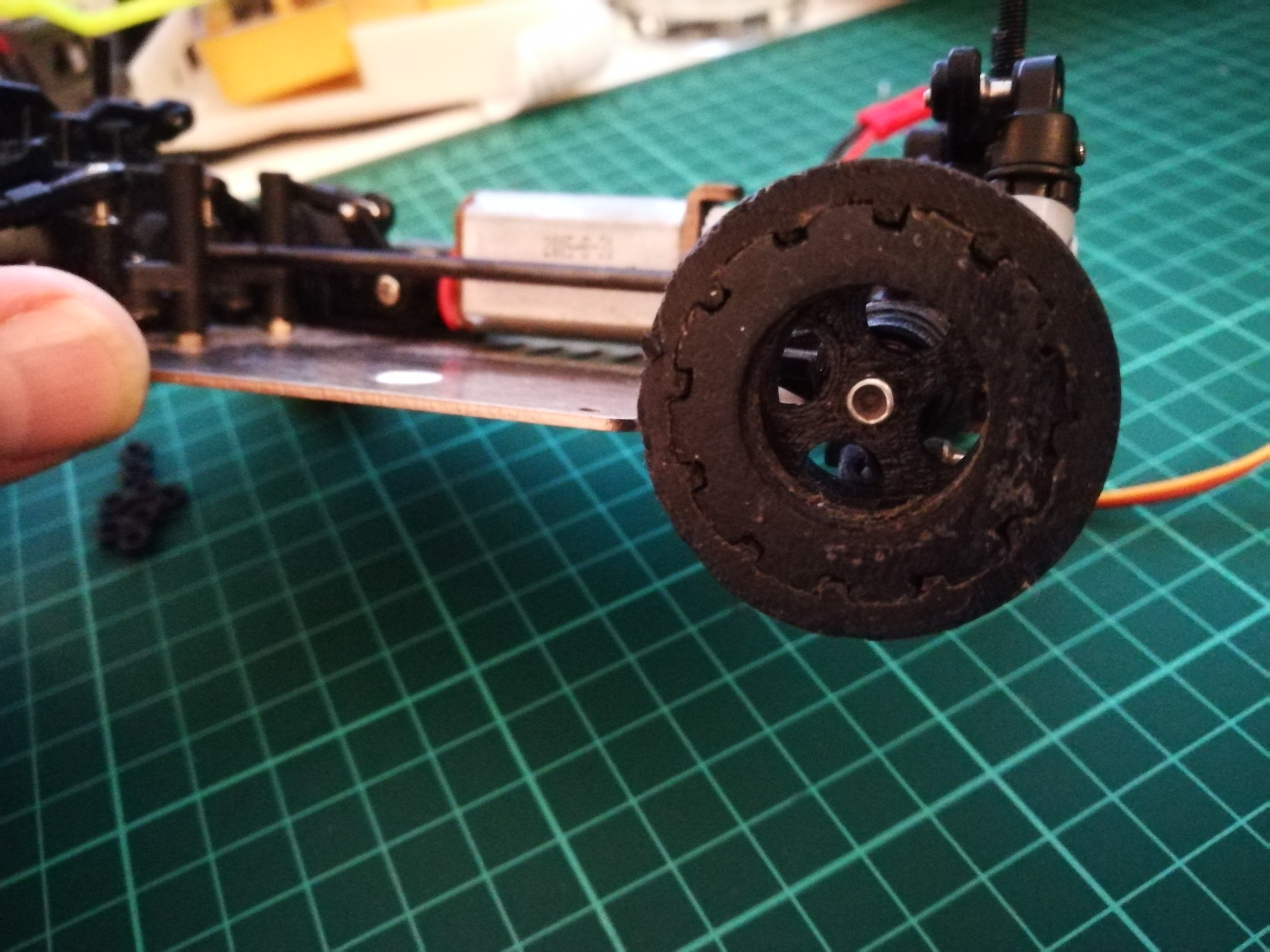
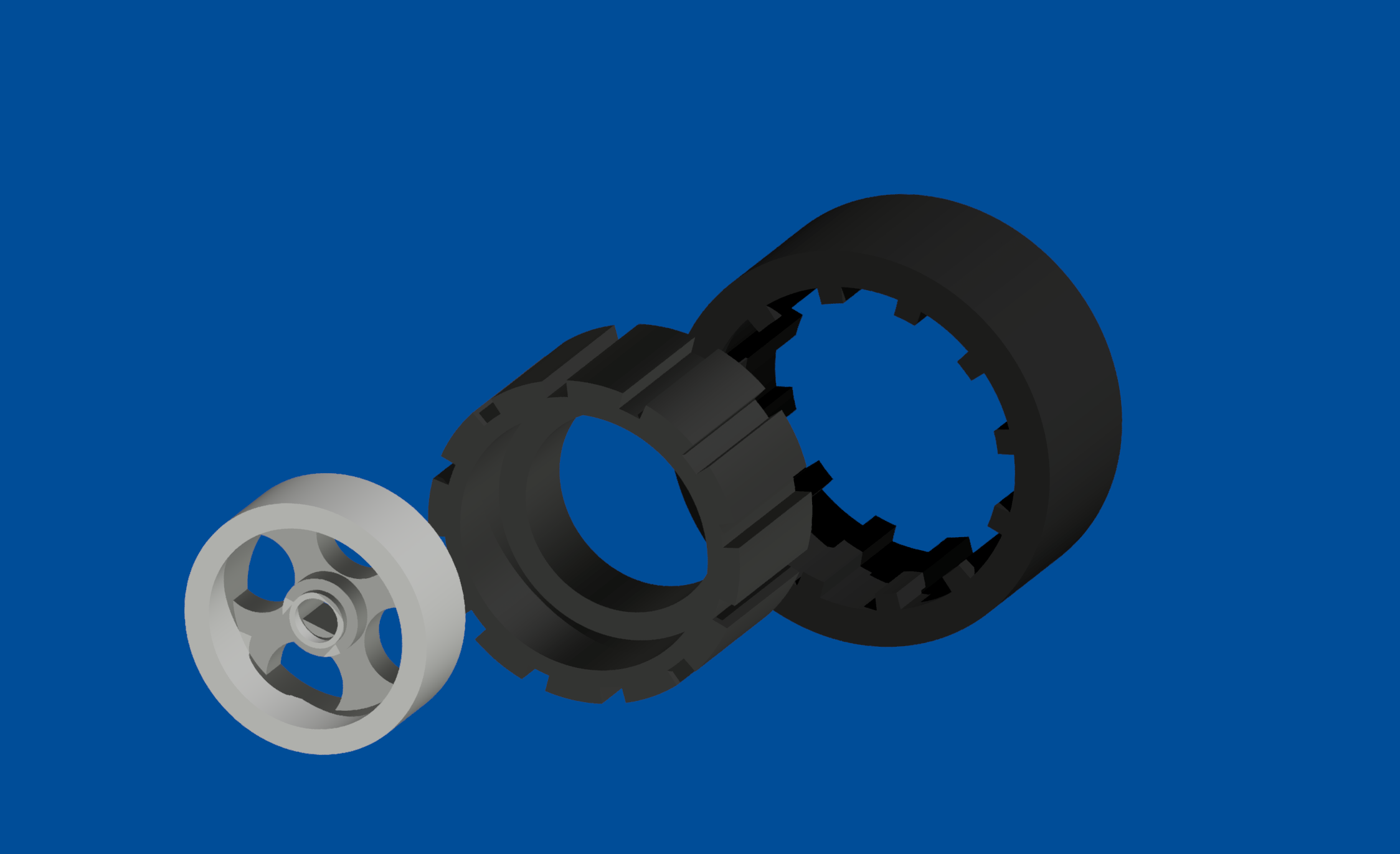
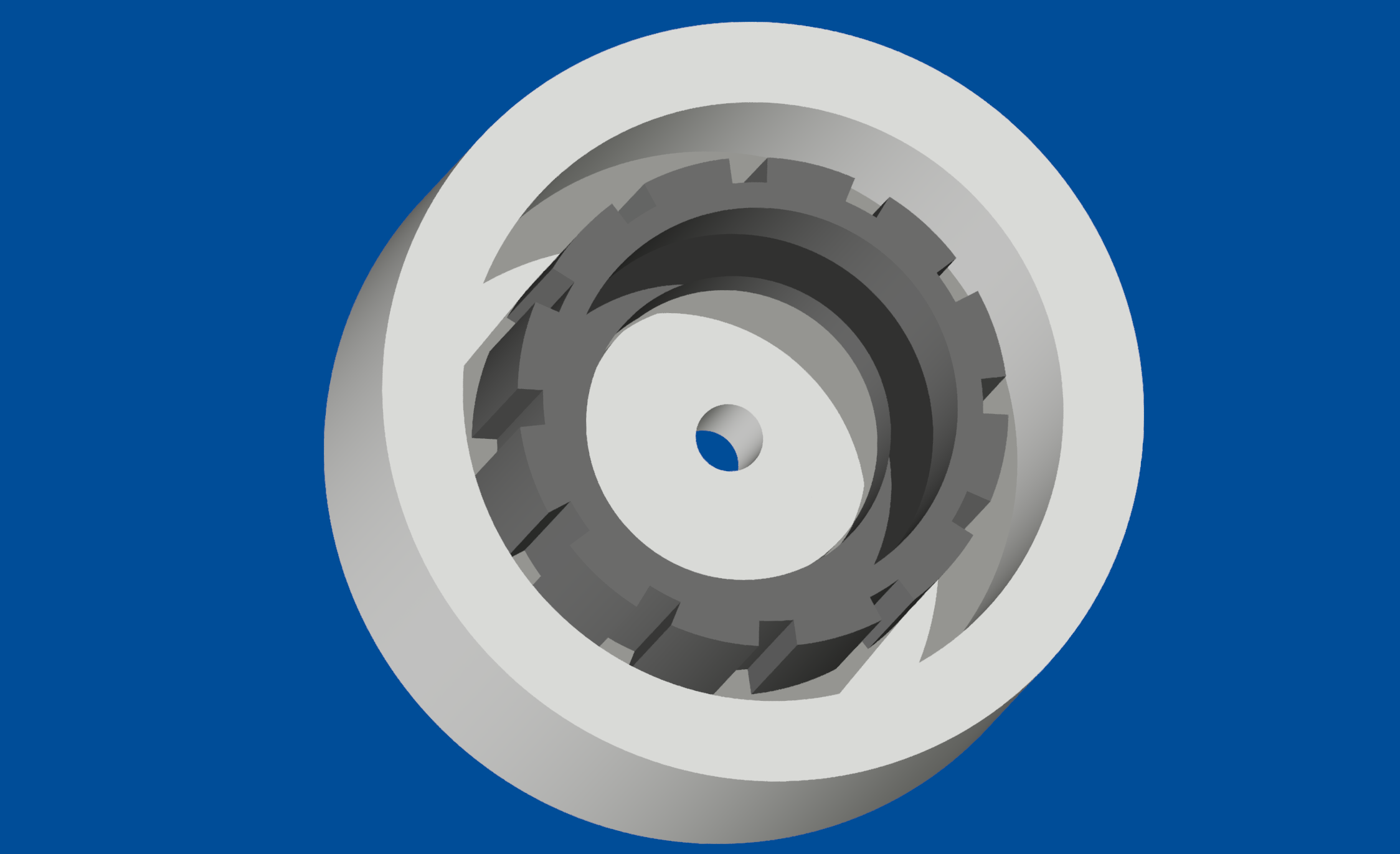
Important design feature: Replace dog bone with PCB.






 mclien
mclien
 Val
Val
 jupdyke
jupdyke
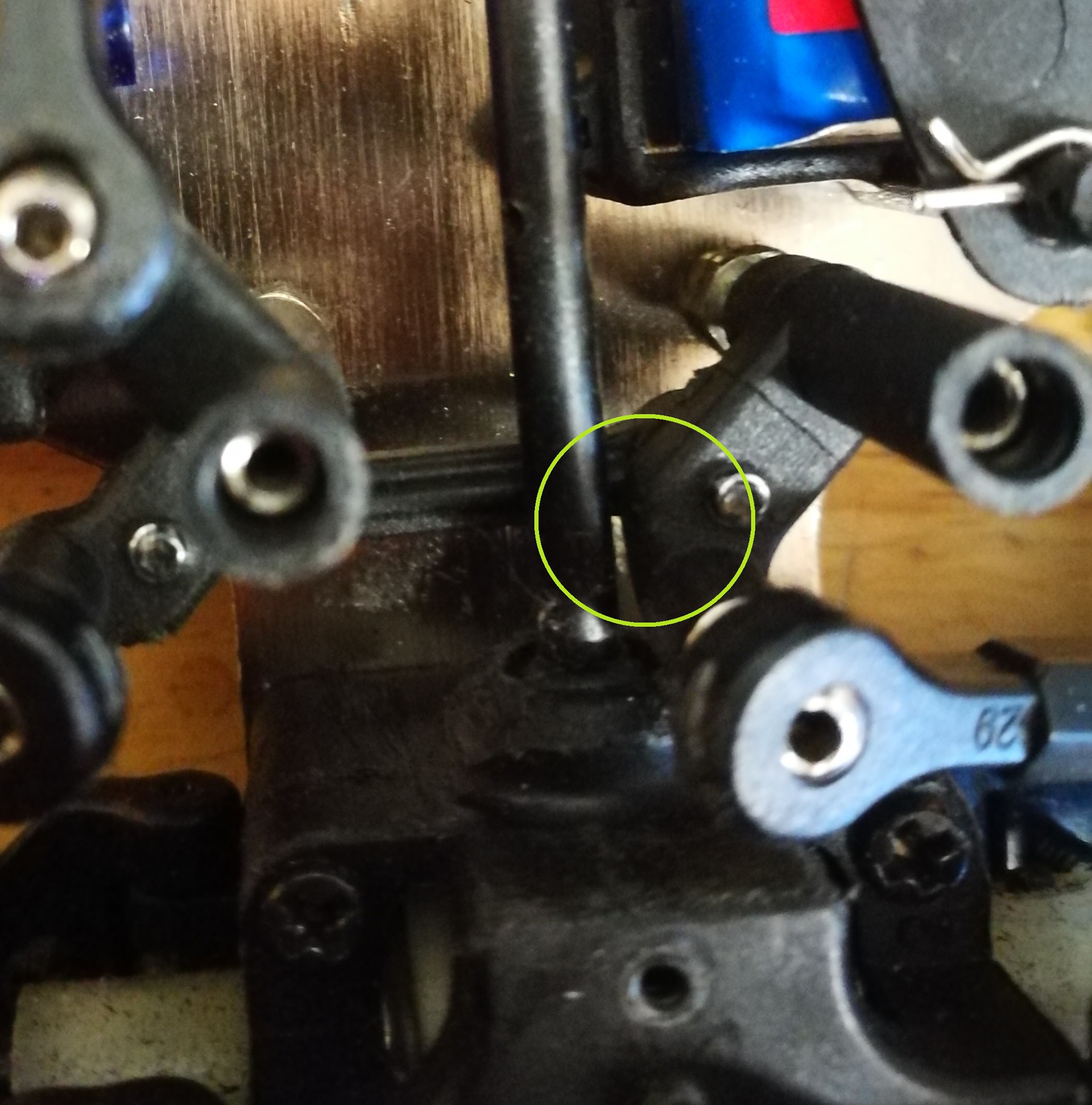
Hello, i will own this model soon, a242, can you tell me more about the steering improve? i don't understand the way you use.
Thanks