 oneohm
oneohmChallenge Addressed:
- OHMni-stick tackles the challenges faced by individuals with disabilities or limited mobility in effectively accessing and controlling technology. Traditional input devices often pose barriers due to their high force requirements and large movements. OHMni-stick aims to provide a comprehensive solution that overcomes these obstacles, enabling users to engage more independently in various activities.
Problem Alleviation:
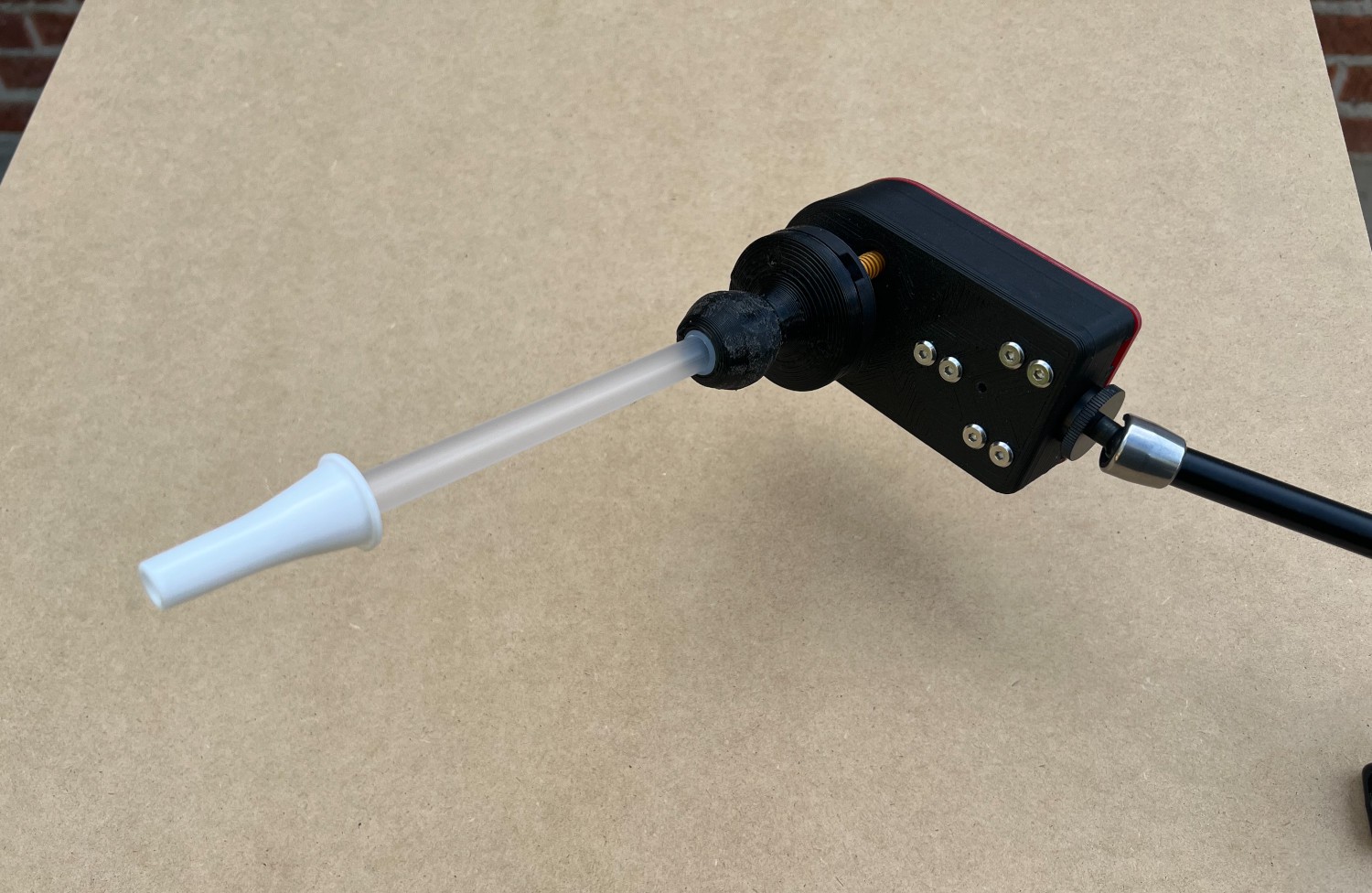
- OHMni-stick offers a practical solution to alleviate the challenges faced by individuals with disabilities or mobility limitations. This low force and displacement force-based joystick requires minimal effort and allows for precise control, making it accessible to users with limited strength or dexterity. Additionally, the pneumatic pressure-sensitive buttons provide customizable force sensitivity and tactile feedback, further enhancing control and adaptability for users.
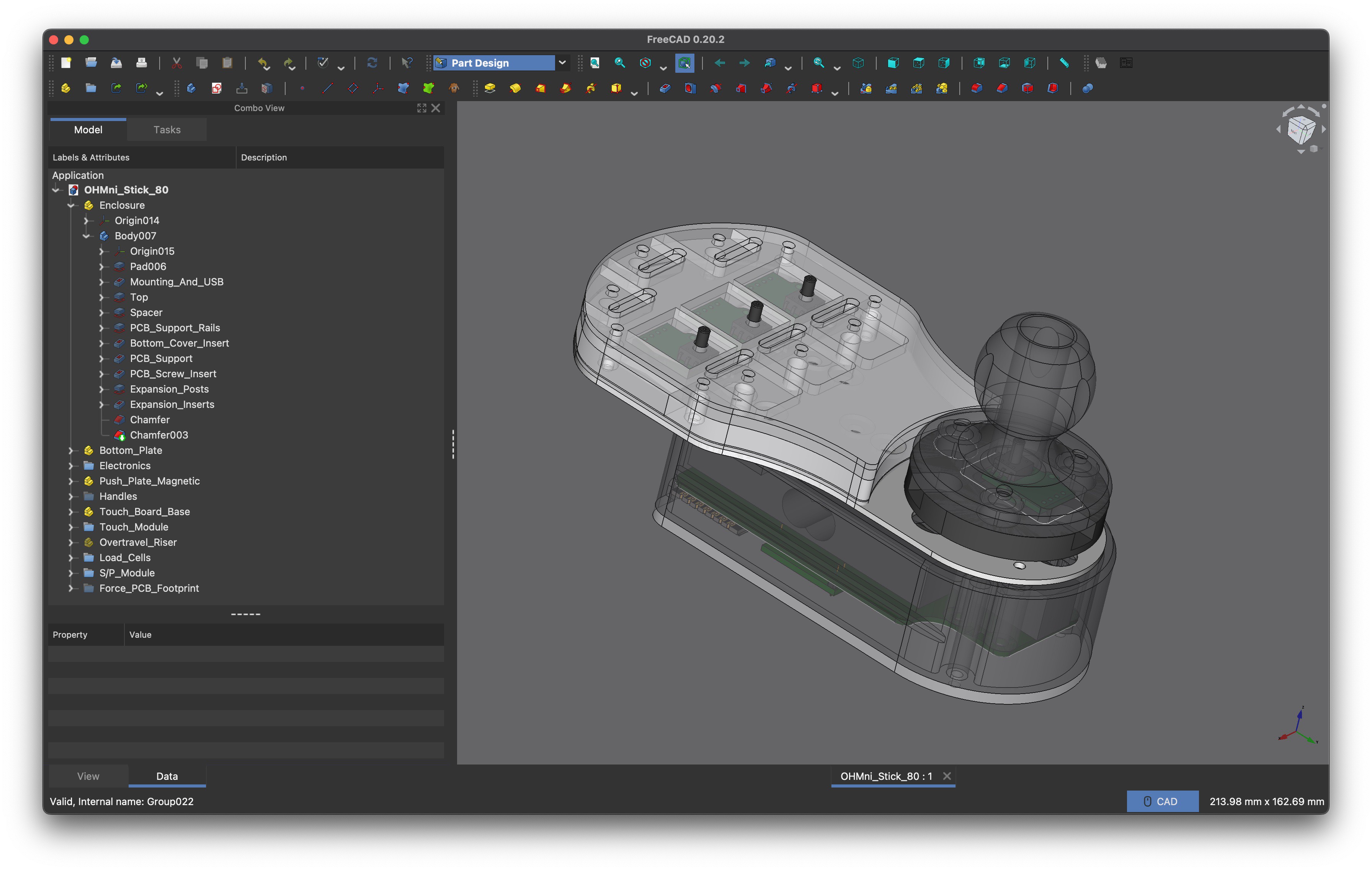
Hardware Solution:
- OHMni-stick is a hardware solution designed to assist, adapt, and rehabilitate individuals with disabilities or mobility challenges. It aims to enhance learning, working, and daily living by offering a versatile input device. Whether it's aiding in rehabilitation exercises, controlling equipment, or providing a more accessible gaming experience, OHMni-stick is designed to cater to diverse user needs.
The open-source nature of OHMni-stick reflects a commitment to collaboration, knowledge sharing, and community involvement. The project documentation and shared design files encourage further innovation and customization. By fostering an inclusive ecosystem of developers and users, OHMni-stick aims to contribute to the ongoing improvement of assistive technologies. The design is released under GNU General Public License v3.0.
Advantages of the OHMni-Stick:
- Enhanced Accessibility: Enables individuals with limited muscle strength and range of motion to control devices effortlessly.
- Low Force and Displacement: Requires minimal force and displacement for operation, accommodating users with extremely limited strength and mobility.
- Customizable Grips: Interchangeable grips provide personalized comfort and adaptability.
- Responsive Pneumatic Buttons: Delivers precise and tactile control with adjustable sensitivity.
- High Sensitivity and Accuracy: Responds to forces as low as a single gram and offers real-time tracking.
- Open-Source Design: Promotes collaboration, innovation, and continuous improvement within the community.
- Inclusive Design: Enhances learning, work, and daily living for individuals with disabilities or mobility challenges.
- Versatile Applications: Suitable for controlling wheelchairs, operating assistive devices, and interacting with technology.
Direct links to the project Logs:
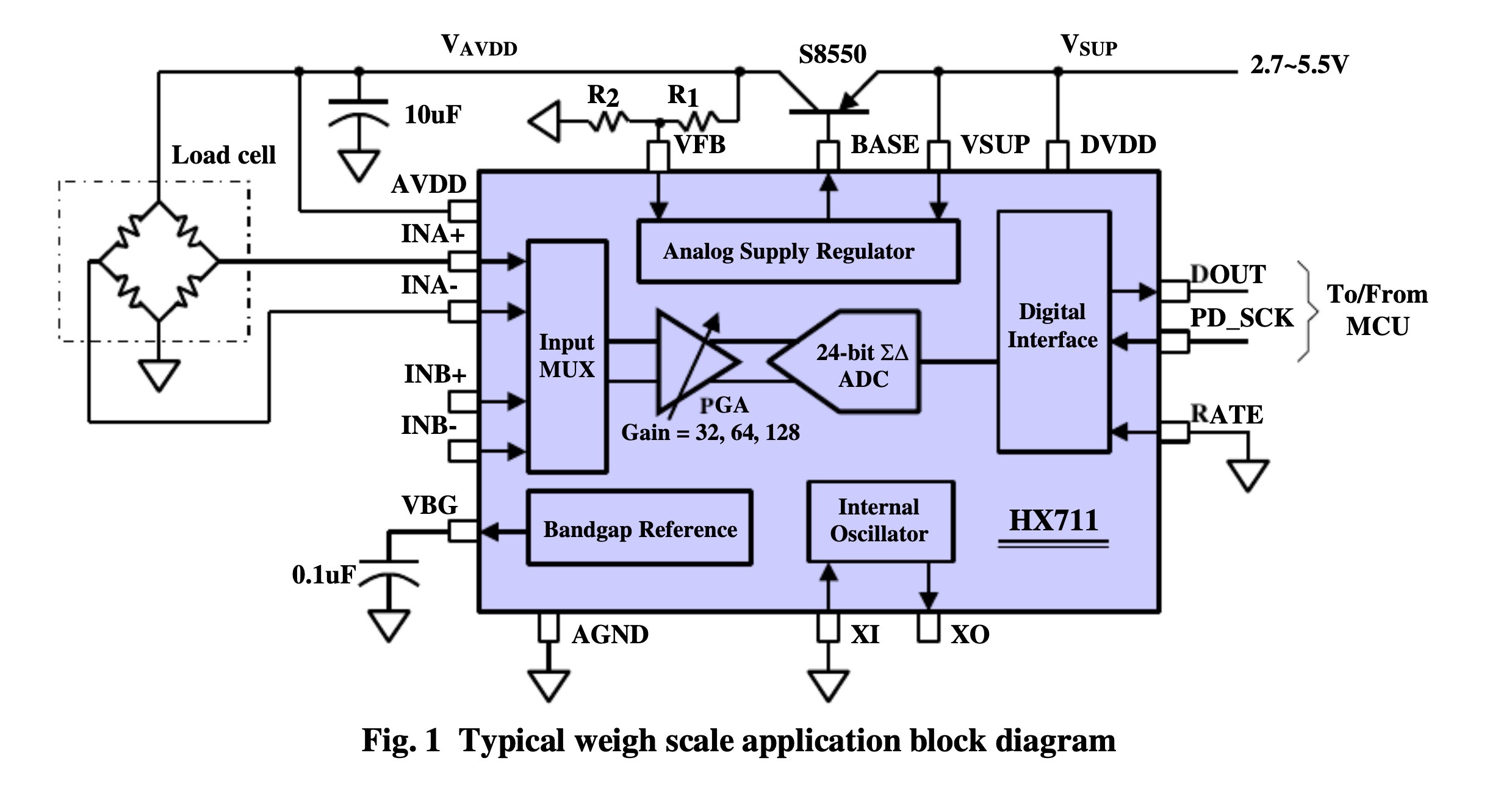
Objective Force and Displacement Measurements
Pneumatic Pressure-Sensitive Buttons
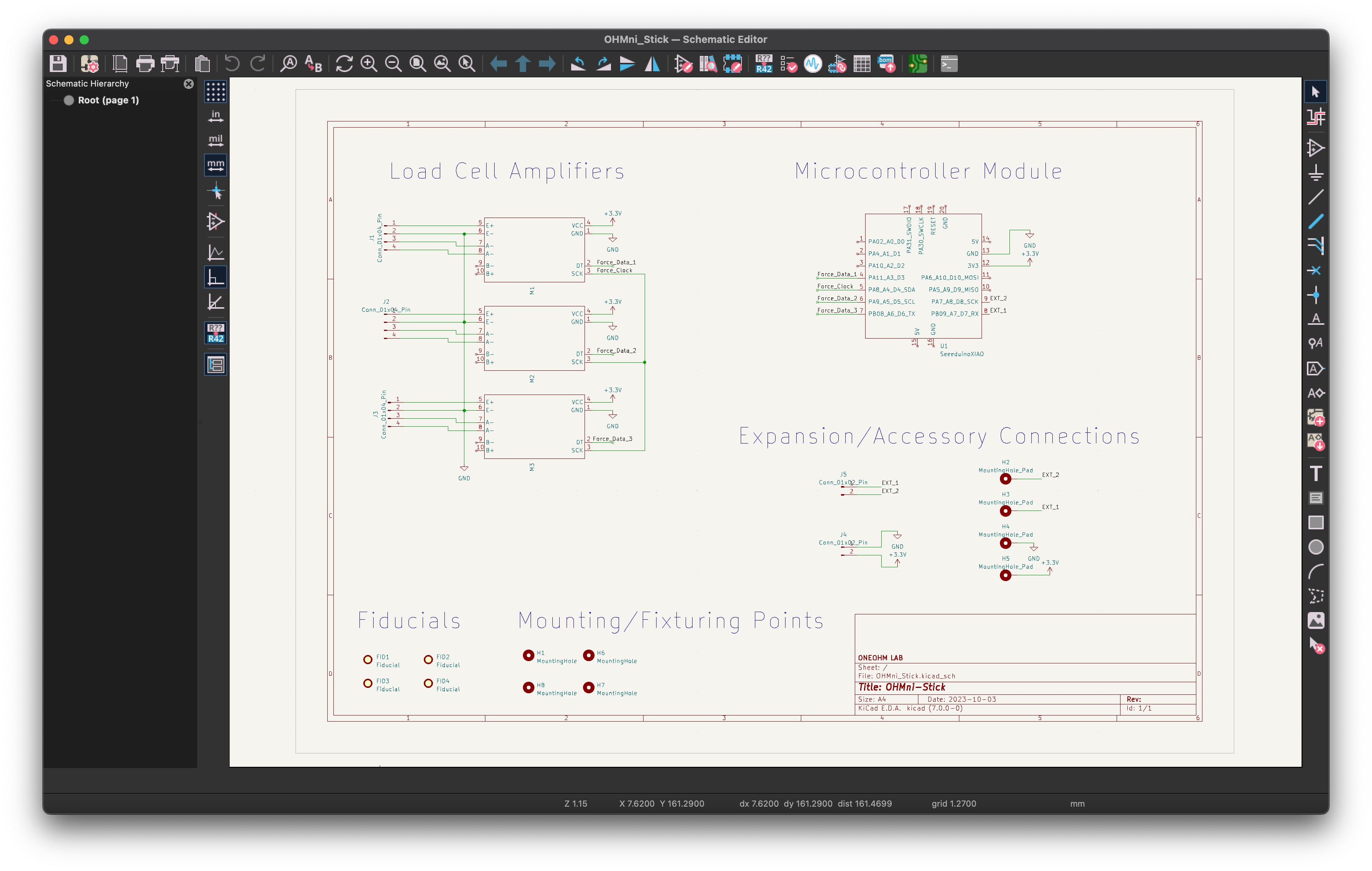
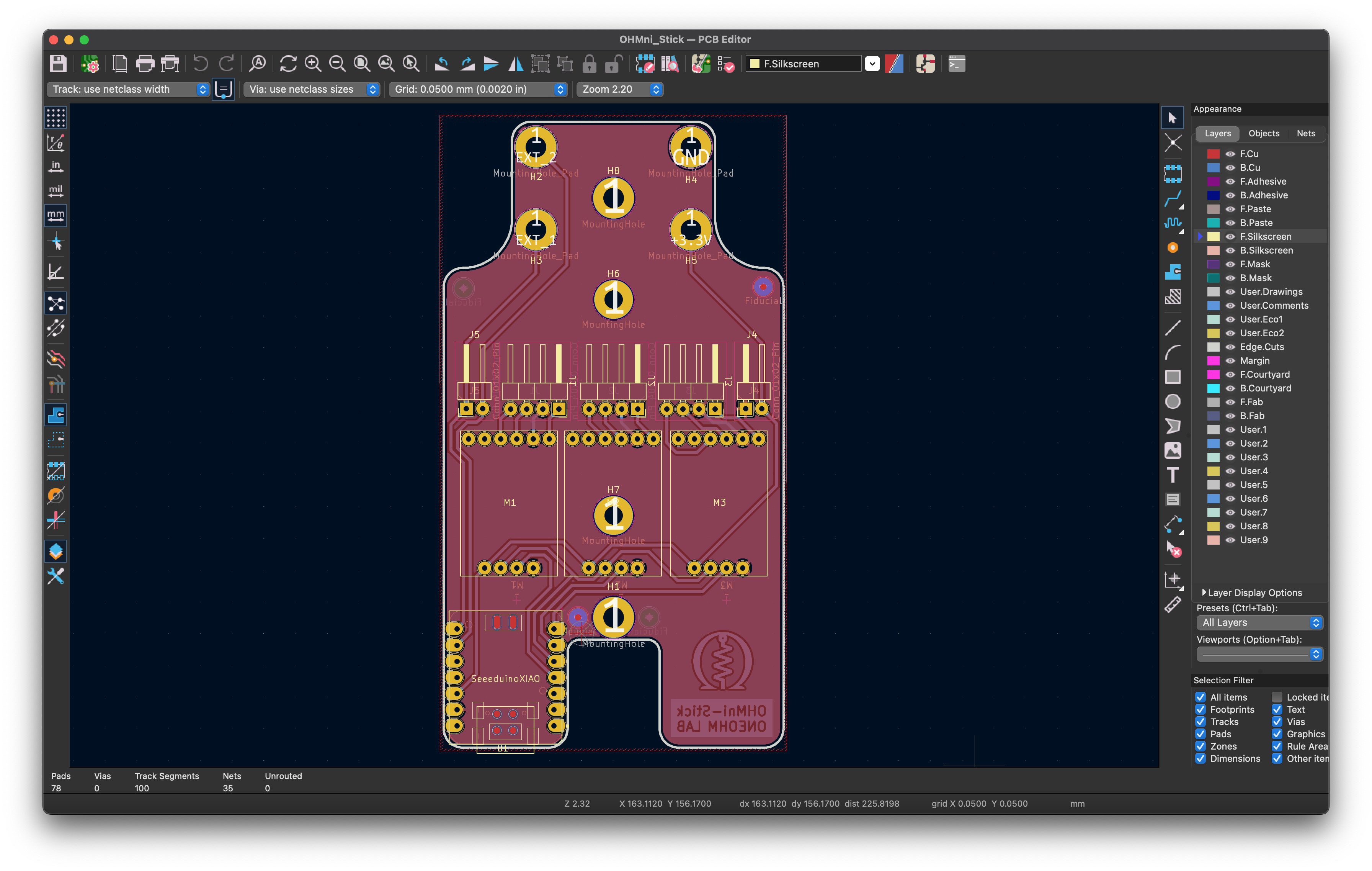
KiCad Schematics and PCB Design






 Bianca Russo
Bianca Russo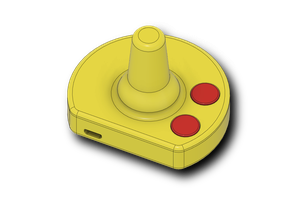
 Julien OUDIN
Julien OUDIN
 spacefelix
spacefelix
Great job! Could I translate your work to vietnamese and share to our community with original link include ?