deʃhipu
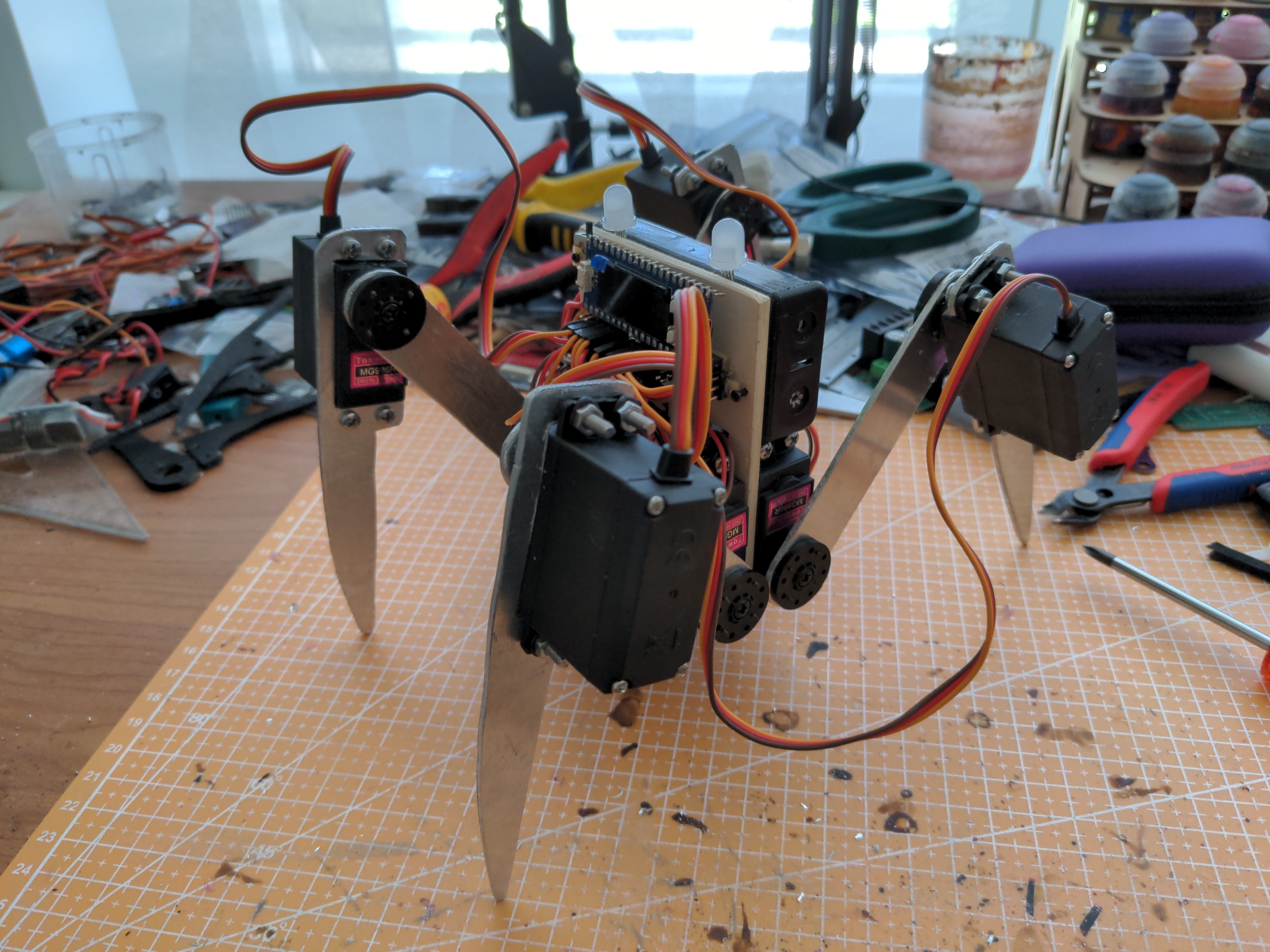
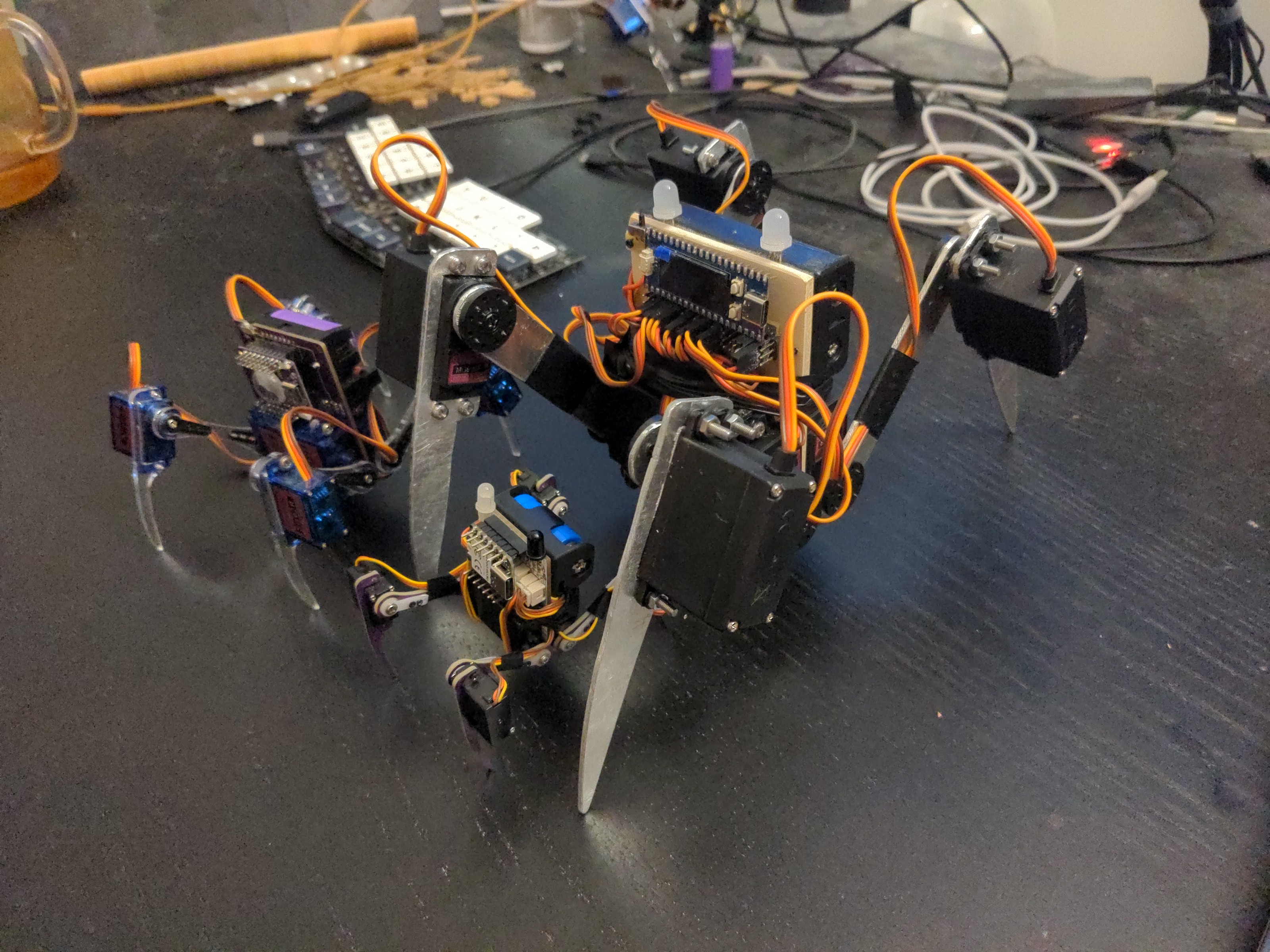
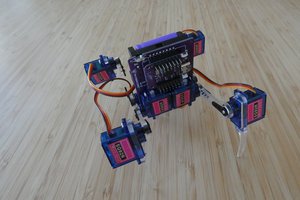
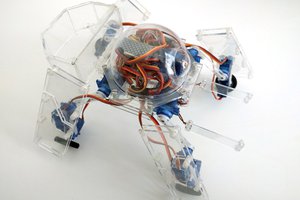
deʃhipuThe parts available to us sometimes drive what we build. When I found some 2g sub-micro servos in my drawer, I decided that my #Fluffbug robot needs a 50% version, and so #Wee Bug was created. Now I found some beefy MG886R servos, so it's time for a 200% (not quite) version.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests