 deʃhipu
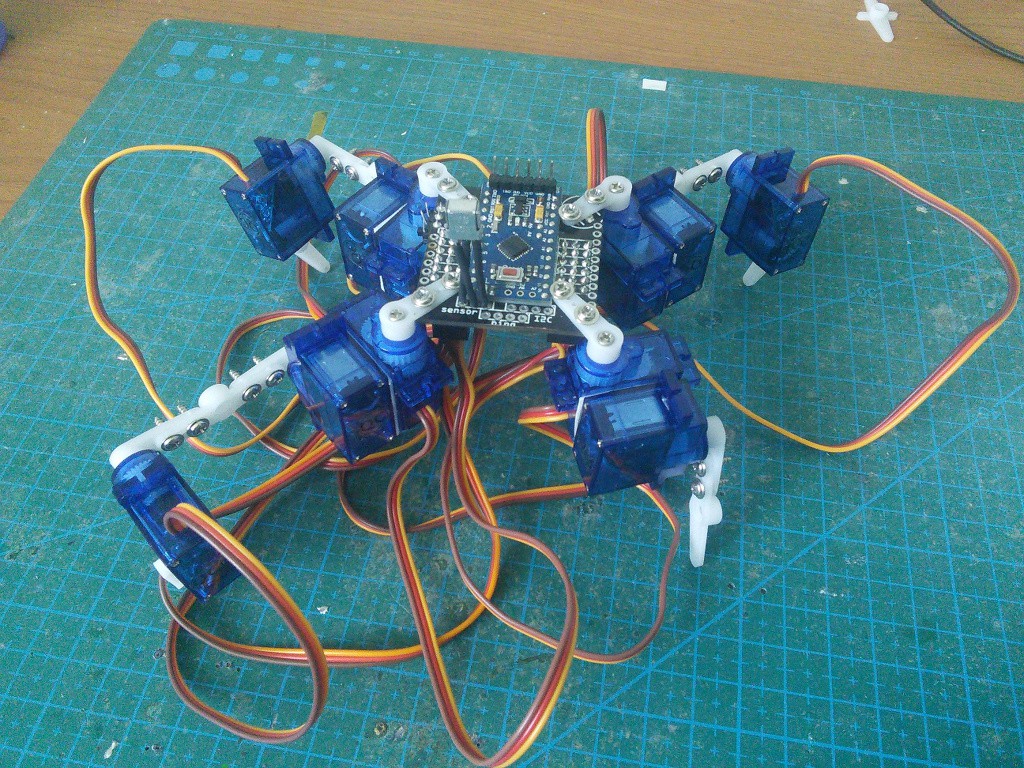
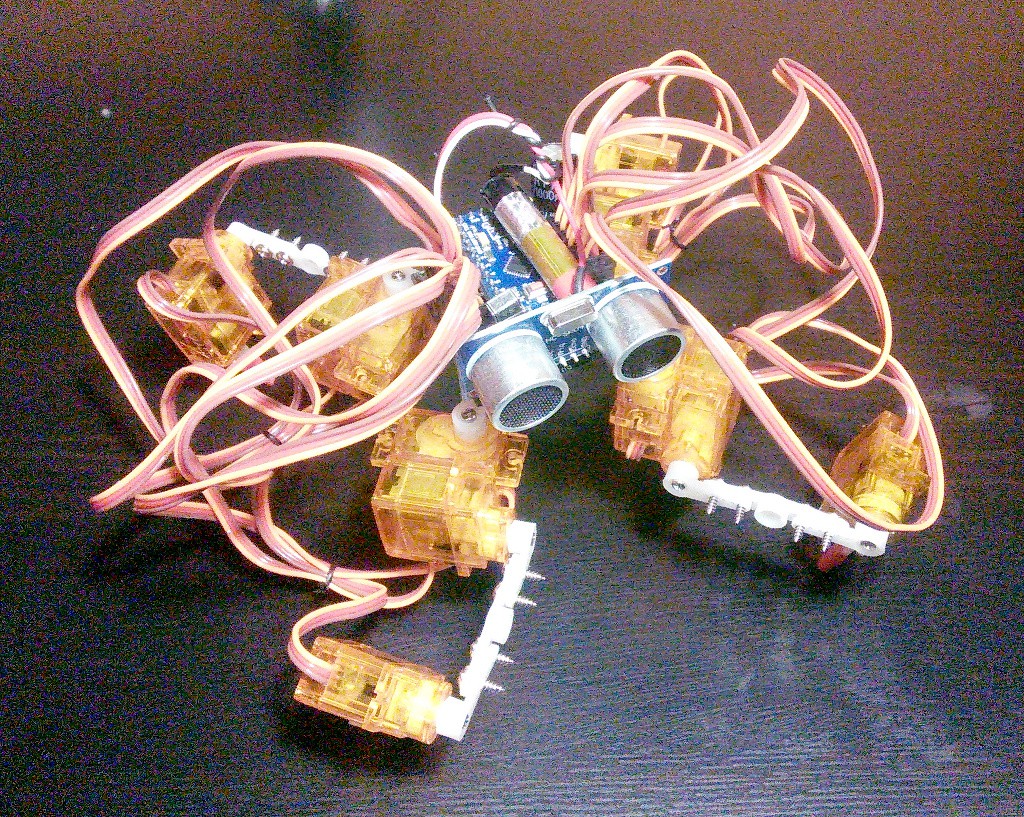
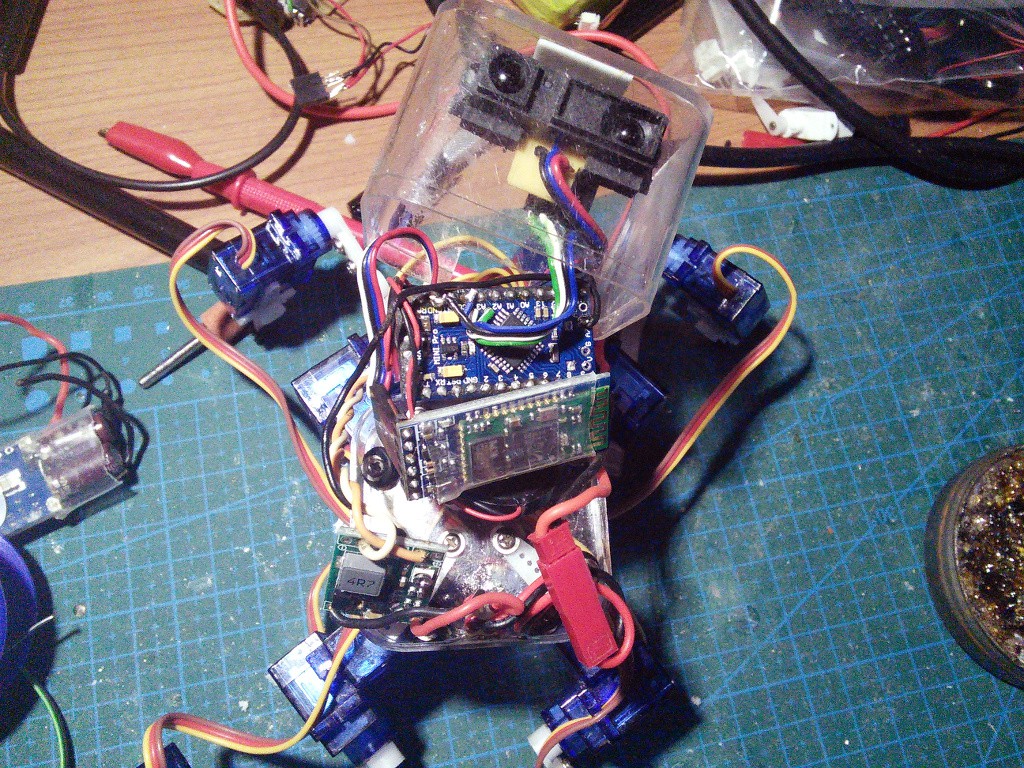
deʃhipuI consider this project more or less complete hardware-wise. I might add a sensor or two more if I can fit them inside... It uses an old iPod Nano box for the body, but you can use pretty much anything: a pill box, a plastic jar, even just a piece of a PCB. All the parts together cost me around $75.
Software-wise, I have the creep and trot gaits working, and I have a program that lets me control it with a gamepad. I'm working on more interesting behaviors.



 jimrd
jimrd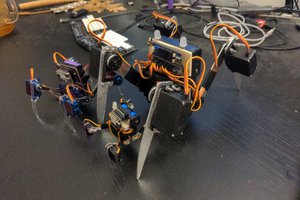
I love how simple/compact it is yet having the 12 servos nice