Dobsonian telescope:
- Wikipedia - https://en.wikipedia.org/wiki/Dobsonian_telescope
- YouTube -
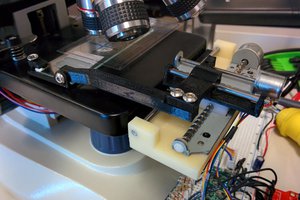
- Design - I used a wooden frame rather than a cardboard tube. The telescope is balanced on a mount that sits on a swiveling base, which can be rigged with bike gears and stepper motors to automatically point the telescope. The azimuth can be controlled by a 3D printer threaded rod and stepper motor. Is it worth it to automate that or is it good enough to have an optically functioning telescope and no more? You decide.
- Materials list:
- Primary and secondary mirror (such as 114 spherical mirror)
- Eyepiece (e.g., 15-25mm Plossl)
- 3ft ~1x1” fence posts (6 or 7 of them)
- Craft plywood (~4sqft)
- Fasteners (nuts, screws, bolts, angle brackets, straight brackets)
- For spider mount:
- Bike spokes (or something similarly thin)
- Fasteners (if you want adjuster screws)
- Bottle cap or cardboard tube (e.g., aluminum foil roll tube), thumb tacks, duct tape, ect., to mount the secondary mirror.
- For a motor drive
- 2 stepper motors (e.g., Nema 17 Stepper Motor Bipolar 1.5A 42Ncm 42x42x38mm 1.8deg 4 Wires)
- RPi stepper motor hat (e.g., Adafruit) and soldering kit if the pins are not soldered. The Adafruit hat was the only driver that worked for me with my stepper motors and Raspberry Pi 4B.
- 3D printer threaded rod and nut, 3D printer kit bearings, fasteners (e.g., wood screws)
- Bike chainring, bike chain, bike sprocket, fasteners
- 12V battery
- Breadboard, capacitor for the battery power, lead wires, and ribbon cables for stepper motors
- Cost (approximate):
- Mirrors: $30
- Eyepiece: $20
- Wood: $30
- Fasteners: $30
- Camera: $32 (I used a Raspberry Pi IMX462 HDR 2MP Arducam camera)
- Motor drive components:$150
- Cost summary of your telescope by tiers of functionality:
- Basic functioning ~50x magnification telescope: $110
- “” with camera: $142
- “” with motor drive: $300
- Astrophotography
- Technical constraints: larger pixels have more sensitivity, giving a better dynamic range, but this correlates with a lower resolution for a given sensor area. Less expensive cameras (e.g., webcams, jetson nano / ribbon cable Pi cams) have smaller sensor area than DSLR cameras, and a small sensor area means that it is hard to locate a sky object with a smaller sensor.
- There is a <$100 pricepoint for Pi cameras and I found that using IMX462 ($32, 6.46mm diagonal) with RPi libcamera to control exposure time was good but low resolution, 2MP. The smaller the sensor (diagonal), the smaller the field of view (FOV). A smaller FOV makes it hard to locate objects and keep them in frame.
- Higher Pi cam price points are the IMX586 ($200, 8mm diagonal), and IMX283($340-$450, 15.86mm diagonal). See the Arducam website.
- This brings us to DSLR cameras (Nikon, Cannon, etc.) where a used DSLR is >$300 and the sensor diagonal is >12mm. Use a T-mount or T-ring to connect the DSLR body to a commercial telescope focuser.
- Image processing (consider using Python OpenCV and NumPy, Qt widgets). Here is my code: https://github.com/acvanp/AstroImage
- Take images of your subject (star, planet, whatever), align those images and average them.
- Place a blanket over the telescope and take "darks", 4 or so of them, average the darks and subtract the dark average from the image average.
- Shine a light into the telescope and take "flats", average the flats and divide the dark-corrected image average by the flats average.
- After this you can do touch ups like brightness/contrast/saturation/sharpness. Consider using ImageJ software from NIST.


 JanThar
JanThar
 Artur Majtczak
Artur Majtczak