Artur Majtczak
Artur MajtczakStory

Almost every Raspberry Pi enthusiast tries their hand at motion at some point—whether it's moving, sliding, or rotating objects. The most straightforward and economical method usually involves using servos. However, it doesn't take long to realize that servos are noisy, imprecise, and quickly prone to failure.
In this project, we demonstrate how, with the use of incredibly fast, powerful, and near-silent BLDC Gimbal Motors, we can create a camera that tracks color, objects, and even the user's face.
Advantages of BLDC Gimbal Motors:
- Accuracy to a fraction of a degree
- Amazing speed (consider how quickly such motors spin in drones)
- Silent operation (at low revolutions, they are practically noiseless)
- Reliability (with no gears, gearboxes, friction, or jolts - there's nothing to break down)
- Significant power (dependent on motor size)
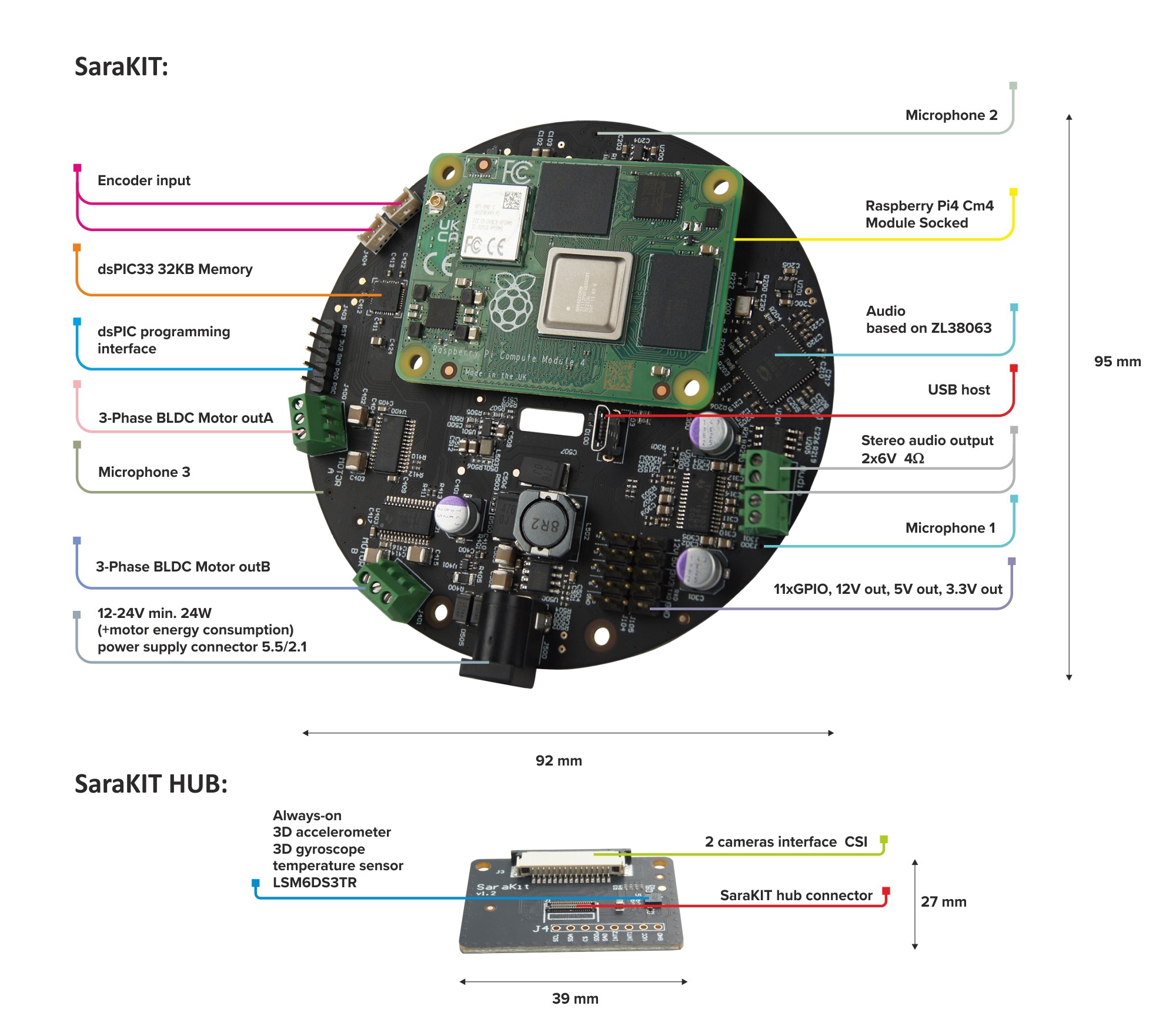
We utilize the open-source SaraKIT, equipped with drivers for precise control of two BLDC motors used in this setup. One motor is responsible for vertical camera movement, while the other takes care of horizontal movement.
For image recognition, color tracking, object tracking, and face tracking, we primarily rely on OpenCV libraries and ready-to-use functions for BLDC motor drivers—all of which are freely available in our GitHub repository.
SaraKIT is Open Source Project a Raspberry Pi CM4 expansion board that enables advanced voice control and precise motor control. It features three sensitive microphones with sound localization for voice recognition up to 5 m away, two independent BLDC motor controllers providing quiet, fast and precise control for gimbal motors, a CSI interface with two cameras on a flexible cable, two accelerometers, a gyroscope, and a temperature sensor.
Now available on Crowd Supply!

 David Held
David Held
 roboteurs
roboteurs