 Matt Vella
Matt VellaMy family loves Halloween. Every year, we add to our collection of Halloween decorations that we use both inside and out of our house. In recent years, we've hosted an outdoor Halloween costume party for the neighborhood and friends - including a chili contest and movie.
This year, I bought a posable life-size skeleton, the first of this kind that we've owned. Maybe it was the fact that we for many years had a non-posable sound-activated talking figure who we are excited to bring out of storage but soon tire of the same 3 phrases ("Ha! I hope I didn't SCARE you")... It probably had something to do the fact that I work at a robotics software company called Viam... Regardless, I decided I had to automate this skeleton.
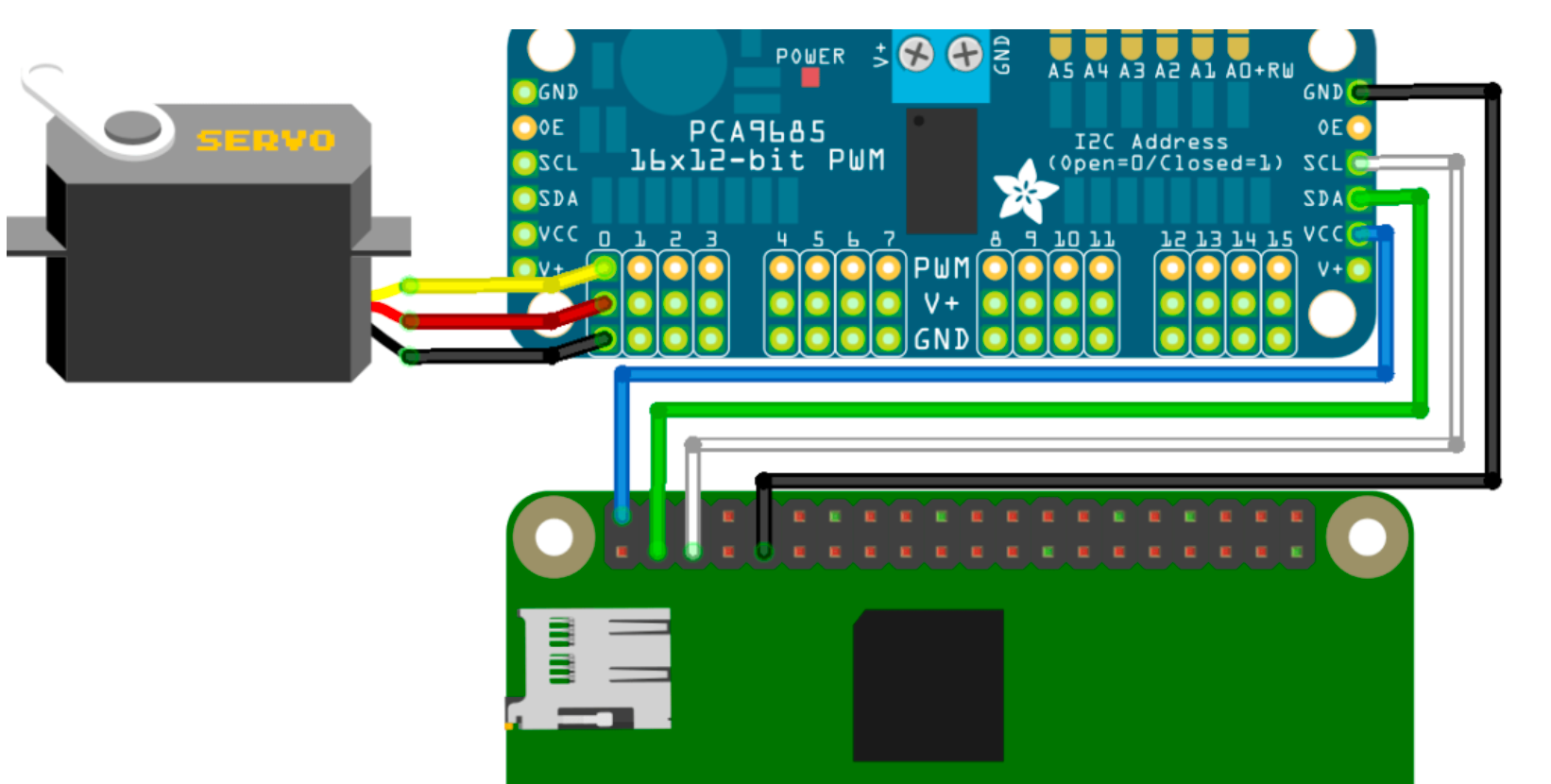
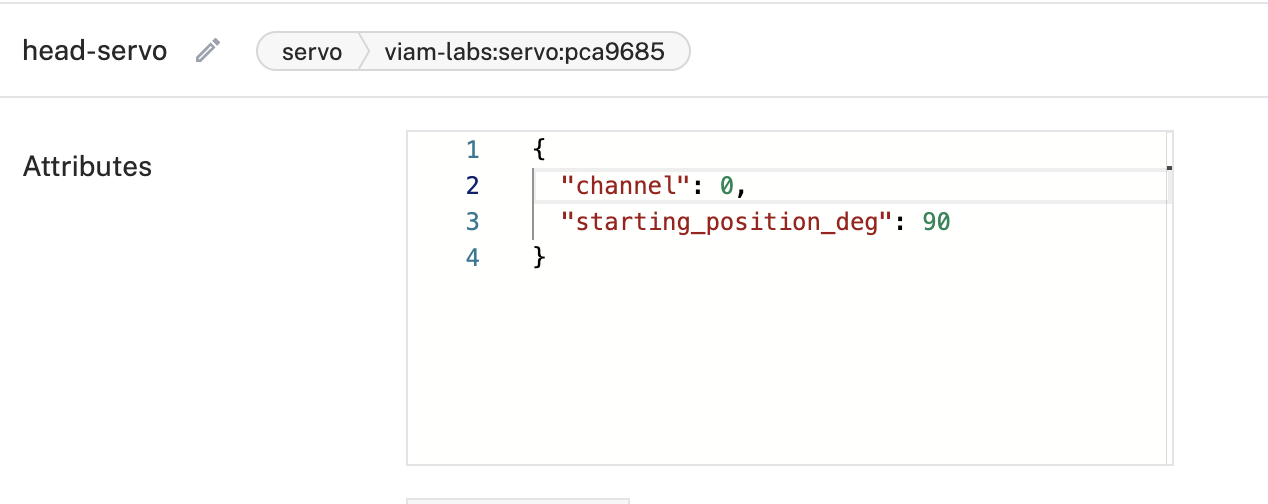
Spending less than $150 (half the cost being the skeleton), what could I do to add interesting and unique capabilities? Adding head and arm motion with servos was a must. Being able to program when this motion occurred by reacting to the environment was critical.
Recently, I've created Viam modules for facial recognition and speech that can be used to add machine machine learning and AI capabilities to any robot. With this software, a webcam, and a speaker - I could have Hack Skellington intelligently interact with his surroundings. Recognize a face and welcome them to the party. Move his head to look them in the eye when they look over. Lift his arm up when they come close, giving them a good scare. Use a creepy AI-generated voice to say various things generated by ChatGPT.
I'll show you how you can do this and more (customize the project to your desires) with less than a couple hundred lines of code!





 Gene Foxwell
Gene Foxwell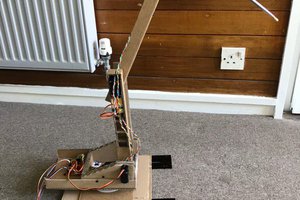

 Stryker295
Stryker295
 Tim Wilkinson
Tim Wilkinson