0%
0%
Bootstrap 3D Printer
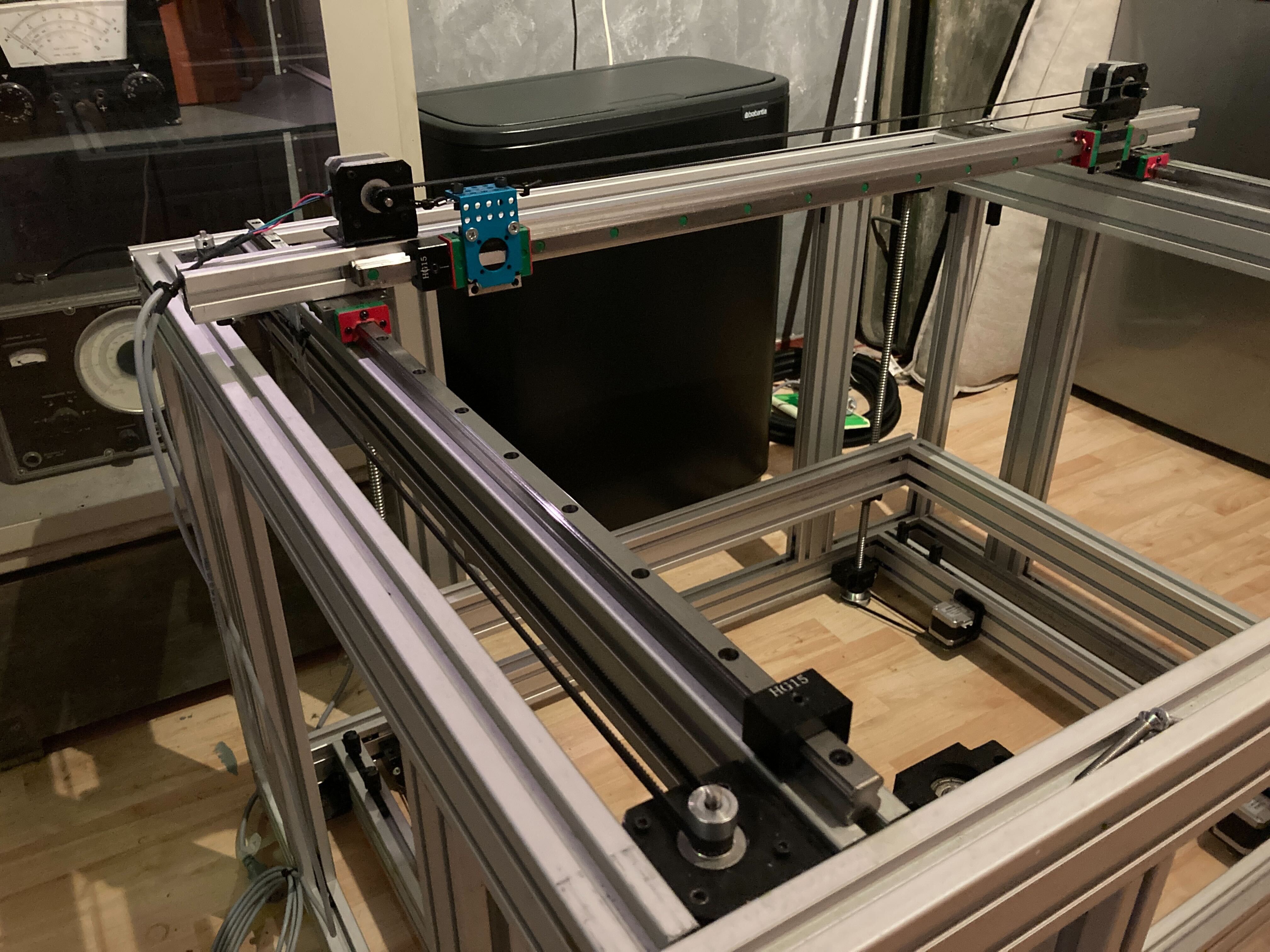
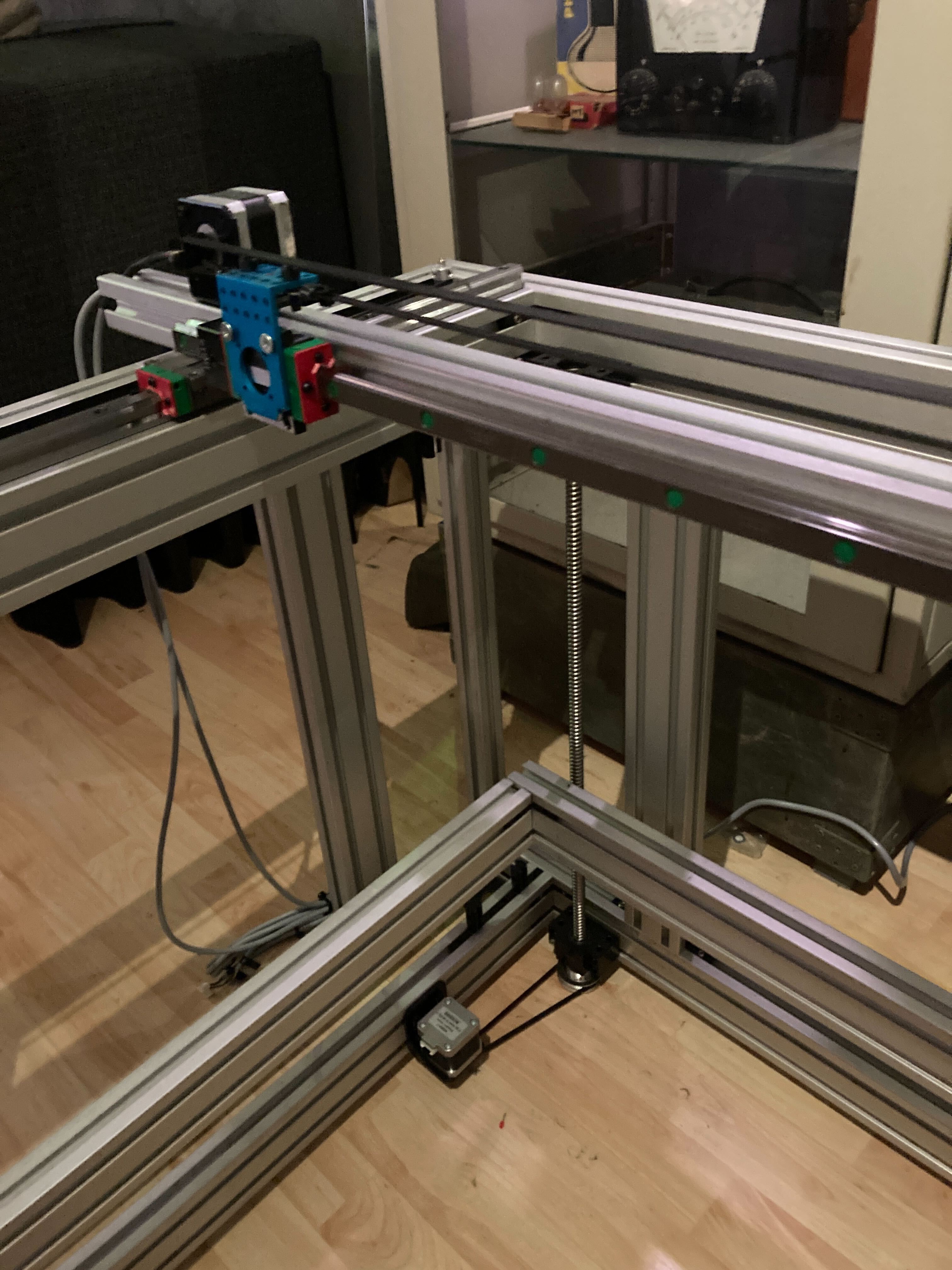
Bootstrap: A large volume 3d printer that can be built at home without requiring any custom 3d printed or machined parts.
 E/S Pronk
E/S PronkBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








 Cees Meijer
Cees Meijer
 Saabman
Saabman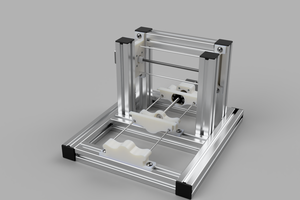
 Myles Eftos
Myles Eftos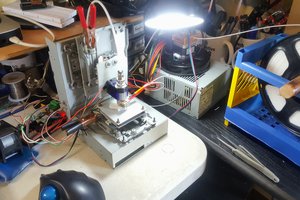
 AccidentalRebel
AccidentalRebel
Solid project, love it!
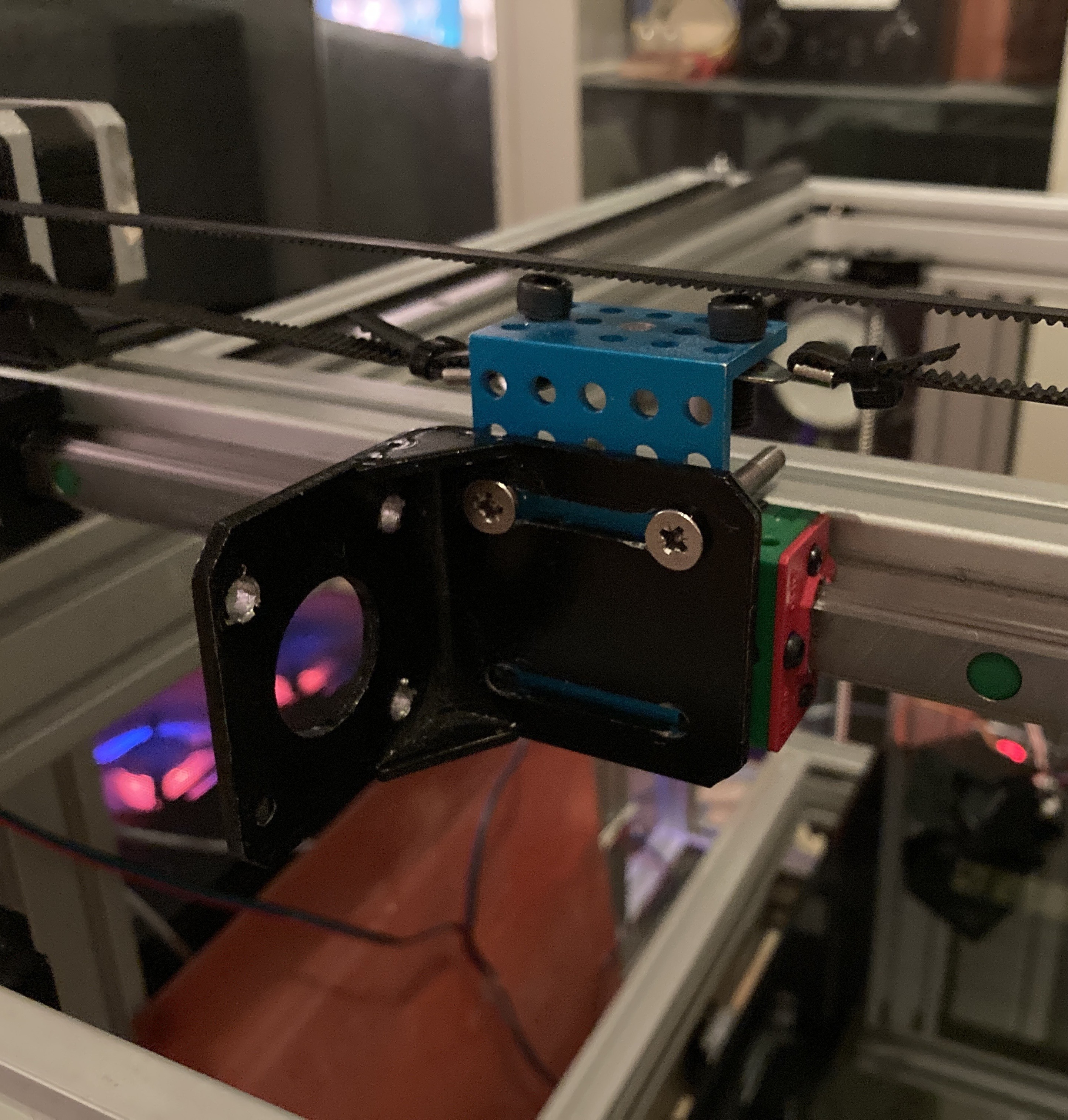
(you're probably adjusting belt tension via the motor mounts. I'll leave a link to my write-up on belt tensioning with a re-purposed hose clamp here for your enjoyment and inspiration: https://hackaday.io/page/7198-hose-clamp-style-gt2-belt-tensioners)