 Mark Dammer MM0DQM
Mark Dammer MM0DQMMain features of the software:
- Responsive (portrait and landscape mode) AJAX interface for use on desktops, laptops, tablets and phones.
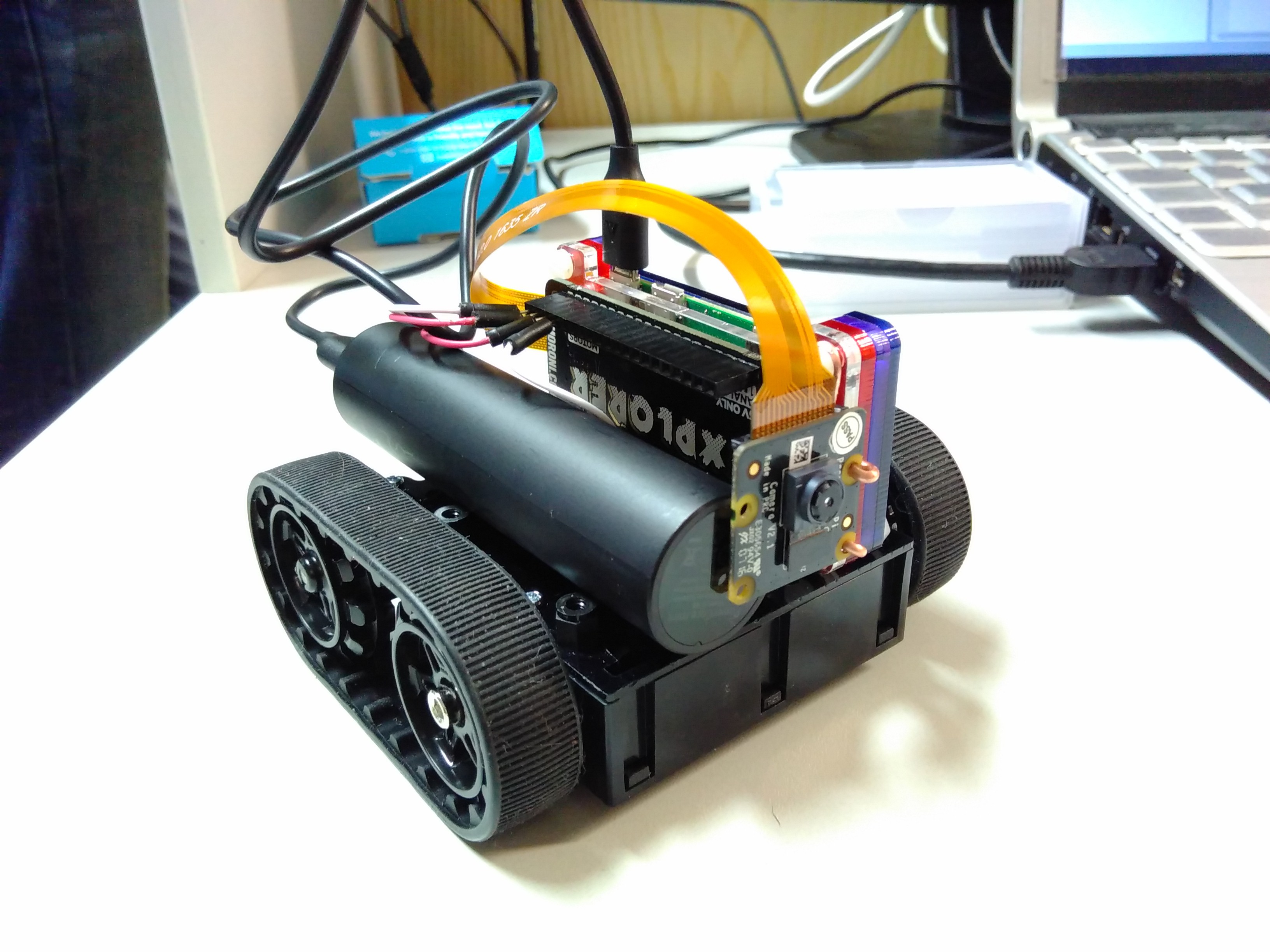
- Designed for Pimoroni STS-Pi and Explorer Hat Pro as hardware interface, but can be adapted to run without IO hardware or using other boards.
- Frontend requires only HTML, Javascript and CSS - no proprietary plugins needed.
- Works without modification when no Raspberry Pi camera is detected - But you are missing something!
- Easy web-API to control the robot from your own application.
- API provides JSON readout of analog and digital inputs.
- API provides both "tank track" style (Y-Y) and joystick style (X-Y) interface.
- Robot stops automatically when connection is lost.
- Data and video connection is automatically reestablished after connection loss.
- Example client application to control STS-PiLot with a Joystick or Gamepad from a remote computer.
The code with installation instructions can be downloaded / cloned from https://github.com/mark-orion/STS-PiLot
A video showing STS-PiLot in action. The user interface has been updated both in design and functionality since this video was recorded:
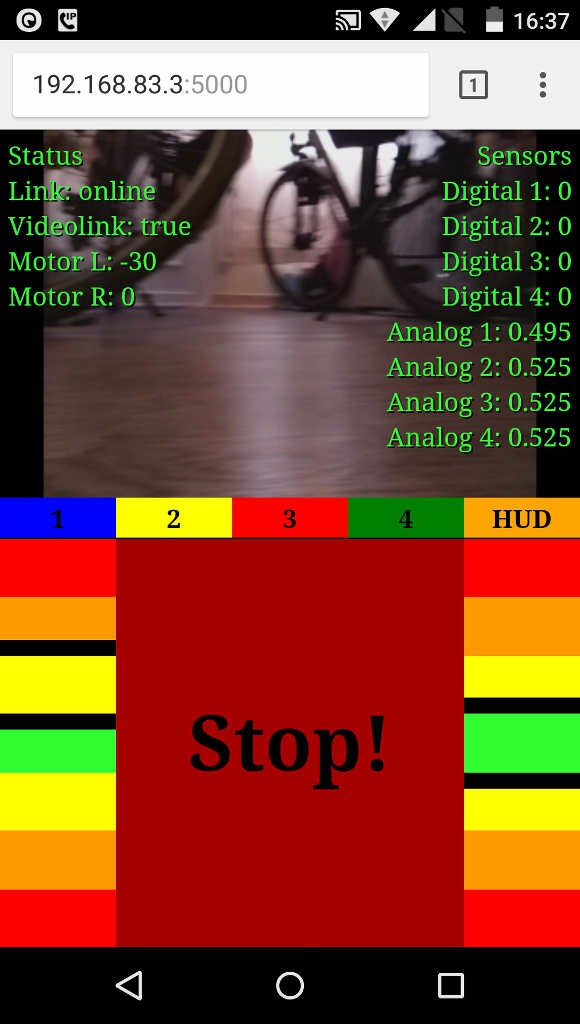
Here are some screenshots of the actual design in both portrait and landscape mode:
Portraid mode on an Android phone (Fairphone 2):
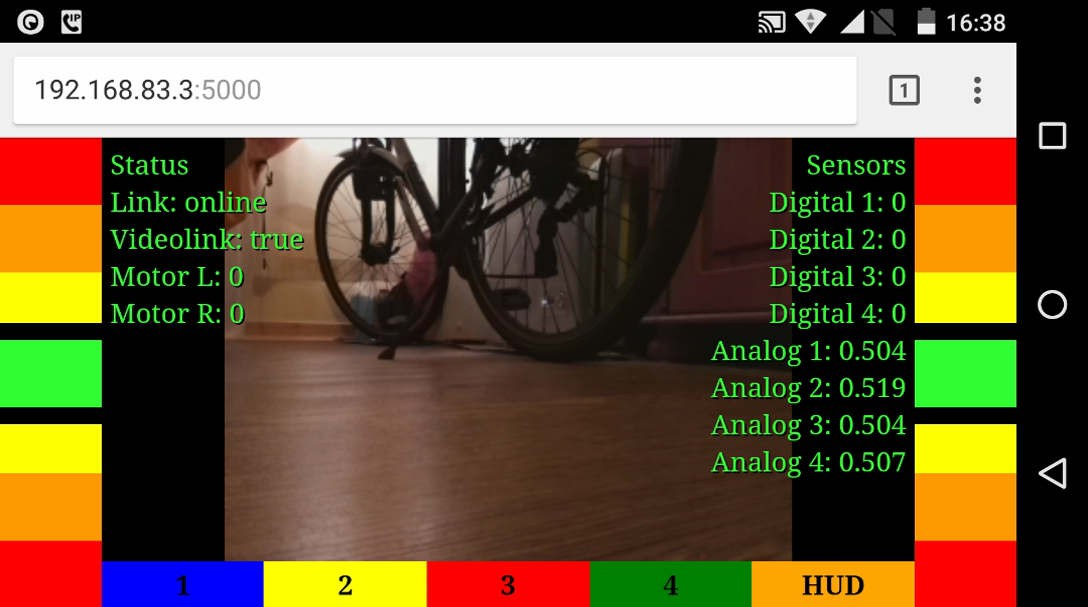
 Landscape mode:
Landscape mode:



 kutluhan_aktar
kutluhan_aktar
 Mahmut
Mahmut
 Matthew Gorr
Matthew Gorr
 Ray Patel
Ray Patel