The main brain for the LawnBot is an ATMEGA168, programmed wtih BASCOM. It doesn't need to do much but interface wtih an on-board GPS, and the 433 MHz control channel for steering. GPS you say? Yes, the project has the capability of automatic guidance, but I'm a little hesitant to use it until I can add a section in the code to avoid obstacles. If anyone would like any more info, I'd be glad to post it. Just kinda added this to HackaDay for the heck of it.
0%
0%
LawnBot 5000 - The Robot Mover
A lawn mower built into an electric wheelchair, controlled via camera and PS2 game controller. Mow more for higher score!
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Joseph Eoff
Joseph Eoff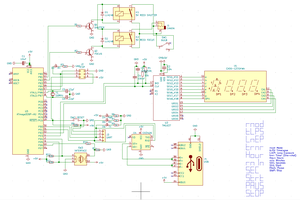
 Torbjörn Lindholm
Torbjörn Lindholm
 Dan Shaurette
Dan Shaurette
 Sergej Stoetzer
Sergej Stoetzer
Cool stuff!
What motor are you using as the "mowing motor" -- the one spinning the blade. I've been toying around with making a lawnmowing rover myself, and so far the hardest problem seems to be finding a suitable motor to drive the cutting element. Everything is either too expensive, or too high voltage, or not enough torque....