Project status:
I have a working version of the architecture simulated in VHDL. It is synthesizable, and I have downloaded it to an Artix-7 development board - the Digilent Cmod. I have a few simple programs running with a UART interface. I have a bootloader/monitor running so I can load programs over the UART. I've written a simple assembler to generate machine code I can send to the bootloader. I've finished a schematic and layout for making a PCB.
Primary project goals:
- Implements only one instruction - move
- Can be built using a minimal number of simple DIP components (74xx TTL circuitry).
- All components are active. No obsolete or hard-to-find components. All components in stock at popular distributors.
- Useful - it needs to be able to run programs in a short amount of time.
Secondary project goals:
- Useful input mechanism. I expect a set of DIP switches for the input, but I'd prefer something more useful like a UART port or maybe a keyboard.
- Useful output mechanism. I could do a simple LED numeric display, but I'd prefer something more useful like a UART or at least a 4x20 character display. Perhaps I'd even do a video memory with a separate display.
- Easy and natural loading of programs. I'd prefer not to have a roundabout way to load programs into memory. Perhaps even use the above UART to send programs.
- Easily expandable for more memory. I'd like to be able to load very large programs.
- Write/adapt a compiler/assembler. I'd like to be able to take existing programs and compile them to run on the computer. This would probably be the last thing I do considering the complexity.
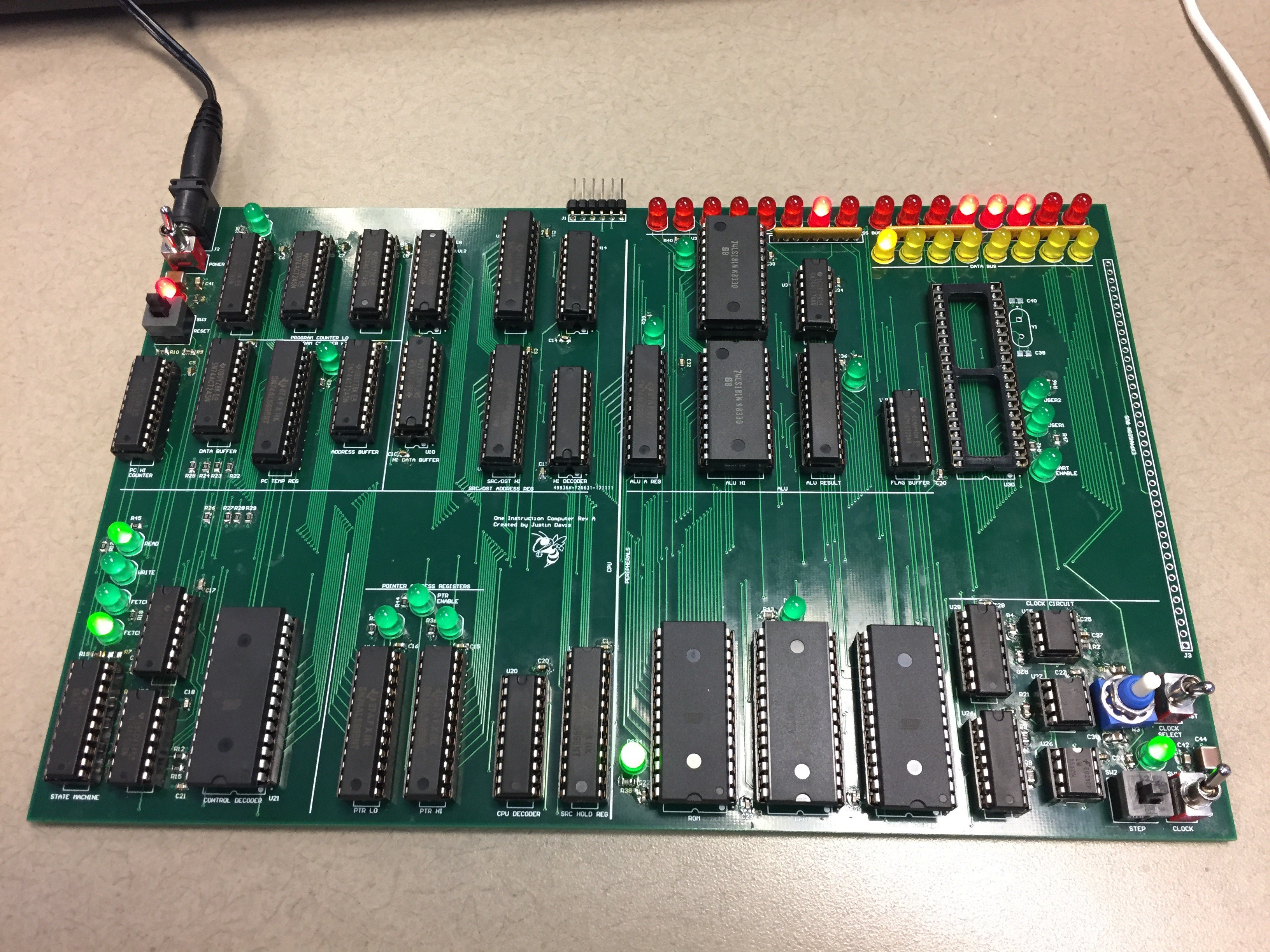
PCB Assembly Plan: bold is completed
- Clock circuit with single-step mode and Reset
- Control state machine with AND/NOT gates and control LEDs
- Program counter Low and High with Memory Address Buffers and address LEDs
- Control Decoding
- Instruction ROM and data bus LEDs
- Src/Dst Hi/Lo registers with data buffers and Src/Dst decoders
- Source Hold Register
- Program counter Temp register and data buffers
- ALU A
- ALU '171 chips
- ALU result reg
- AEB/Carry FFs/buffers
- Pointer address registers
- UART
- RAM




 Tim Ryan
Tim Ryan
 Charlie Smith
Charlie Smith
 kaimac
kaimac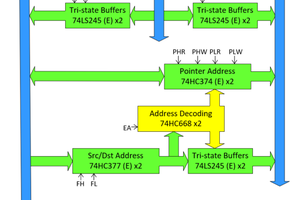
Hi Justin,
Step back and relook at what a TTA is:
MOV [DST], [SRC]
---
The machine cycles are:
Fetch SRC (address)
Fetch Data from [SCR]
Fetch DST (address)
Deposit Data to [DST]
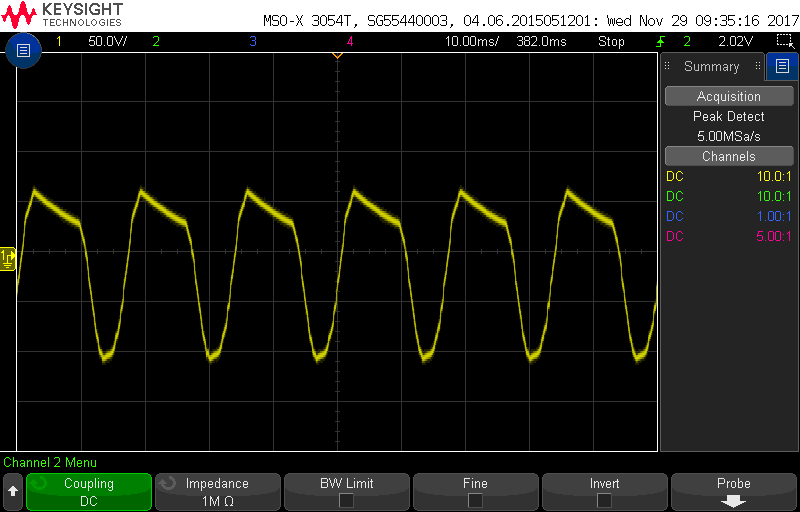
This is what the timing diagram of the control signal looks like for the above machine cycle:
---
Sorry there is no load immediate but your assembler can store a constant for you to simulate a load immediate.
---
For indirect addressing (pointer to pointer moves, you will need these at some point), you will need self modifying code.
That is for another time.
--
If your happy with the above the decoder logic is four chips including the clock.
---
AlanX