 Miguel Davila
Miguel DavilaSuyay or "hope/give hope" in quichua (one of Ecuadors official languages), is the name of the project I want to start in this post. Suyay is a robot designed for beginning in programming and robotics in educational centers, with the objective of providing a base tool for the development of algorithms of collaborative robots, line followers, maze, and soccer players.
Designing a robot for an International IEEE competition is on every engineering student check list. The most important categories are soccer, micromouse, sumo and line follower robots (There are also other new categories as collaborative, drones, humanoids, etc.). But when it comes to learn the basis of this robots or when you need a generic development platform to test your algorithms It’s very time consuming to design something from scratch. Of course, very large and known universities have their own “emblematic” platforms, but in Latin America this reality is completely different: If you need to design something you are entirely on your own. This is a really big problem because every new generation of engineers should start from the ground up, and this leads to very poor, unreliable and amateur designs due to the complexity of balancing homework, final projects and R&D that a robotics competition demands, so, the robots as a result are not the best, we are talking that in a micromouse competition one of the records in solving a 8x4 cells is 50 seconds or so, while in USA and Japan, the best time in solving a labyrinth is around 2 or 3 seconds! So, to ease the robot development and to improve the results in robotic competitions a generic and universal platform is required.
One of the main objectives is to design Suyay with sensors, motors and integrated circuits that can be obtained in developing countries, or in the worst case, can be ordered directly from China (from DealExtreme, FocalPrice, IteadStudio, SeeedStudio, etc.), Achieving a low-cost platform, and an open software and hardware project.
The aim of the project is to create a universal platform, ie it can be used with Arduino, Pinguino, Raspberry Pi, Pi Nano, Banana Pi, Pi Orange, etc. For this, the disign will use an Arduino R3 pinout standard to be compatible with the largest number of platforms in the market.
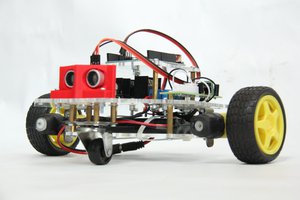
Using the Arduino stack paradigm, Suyay has 3 basic layers: 1) On the base, the locomotion/power supply layer, 2) on the middle the sensor layer and 3) on the top, the brain layer with its adapter
Brain layer: Should be conformed by an adapter changing any type of platform (Arduino, Pinguino, Raspberry, etc.) to an R3 pinout standard and the brain computer or microcontroller that the user want to use for the project.
Locomotion/power supply layer: Should have the motors and the corresponding drivers for them. Should use any type of communication as SPI or I2C, and the option of using only a logic control. It also must have a power supply for the motors, MCU / MPU and sensors
Sensor layer: This layer should be different for the different types of robots the platform will support.
Why different layers instead of a unique solution?
Well, in my experience, having a completely universal solution on a single board will always disappoint a lot of people. For example, if you think of designing a collaborative robot, you will need a basic type of locomotion, also a basic of brains, but an intermediate or advance type of sensors, on the other hand if you want to design a micromouse, you should need an intermediate type of locomotion, advanced brains and intermediate sensors, and so on. If you cram a single board with a lot of sensors or different types of motors, the platform is going to be very inefficient in terms of power and size.
 shamylmansoor
shamylmansoor
 Anthrobotics
Anthrobotics
 Kevin Harrington
Kevin Harrington
 Shifty
Shifty