0%
0%
Project Titan
Create a mechanized robot inspired by the TitanFall titan, but using pneumatic actuators and building it with a reasonable budget
 Shifty
ShiftyBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Anthrobotics
Anthrobotics
 OpenRomibo
OpenRomibo
 Joshua Elsdon
Joshua Elsdon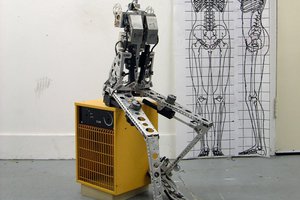
I understand from your logs/comments that you are still in a research phase, I was curious as to whether or not you had given these details any thought yet.
Overall, I like this project.