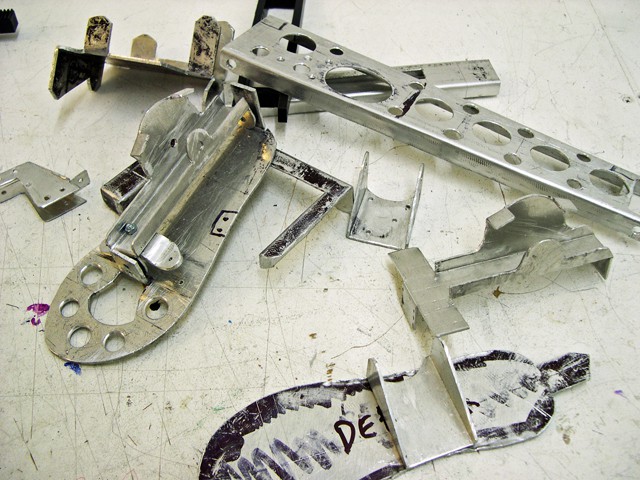
Test bed with legs, on a budget
This project entry is merely a single component towards another.
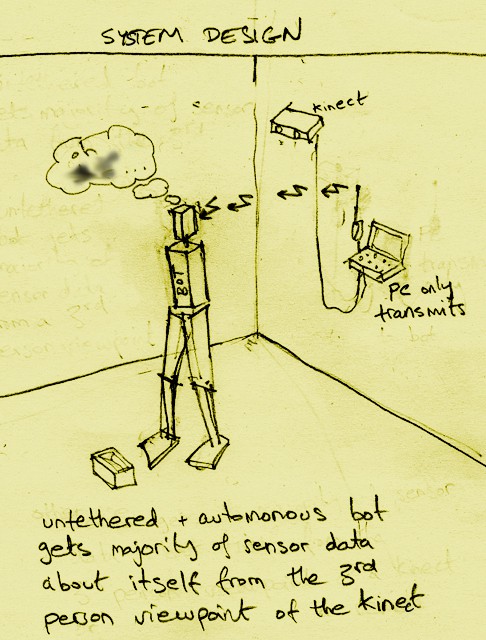
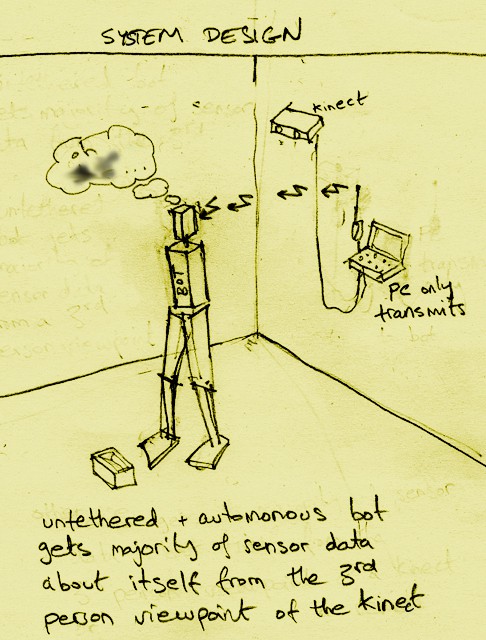
Eventually I hope to have a slightly humanoid 'robot' that will sense
itself and experience its environment only from the 3rd person
perspective . Perhaps a kinect and pc would be suitable to detect and
transmit its stance, attitude, orientation etc, both internally and
environmentally to it.
This communication would only ever be one way, the robot would act
autonomously on the data sent.I should stress that this is not an
attempt to build a darpa challenger type walking robot. Its just a
platform to try out a few ideas with, and a platform that perhaps the
kinect can recognise as a vaguely human shape. I don't mind if it can
only fall on its back and wiggle its legs a bit, so long as this can,
one day, be detected and controlled from a 3rd person viewpoint to
itself. I hesitate to call this sub-project a "robot", it really is just
a test bed.
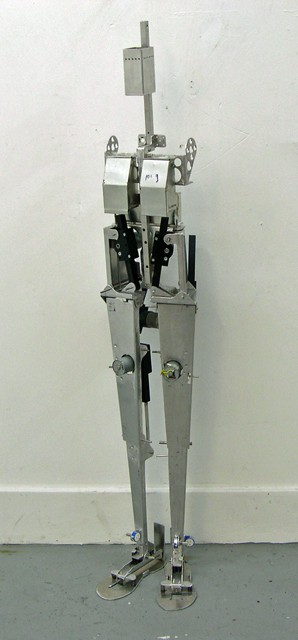
It will need to be the following:
1. Under £ 600 (money is tight)
2. At least the size of a small person.
3. Recognisably humanoid.








 Alain Sanguinetti
Alain Sanguinetti
 Kenny.Industries
Kenny.Industries
 Shifty
Shifty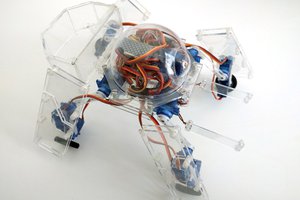
 deʃhipu
deʃhipu
Hey, any new updates on the project, or is this long gone now?