 Horst Schlawutzke
Horst SchlawutzkeAs years pass, transistors become more SMD while eyes can't keep up. In fact flokatis eat up considerable amounts of devices. To end this, wouldn't it be good to have a robot handling tiny stuff?
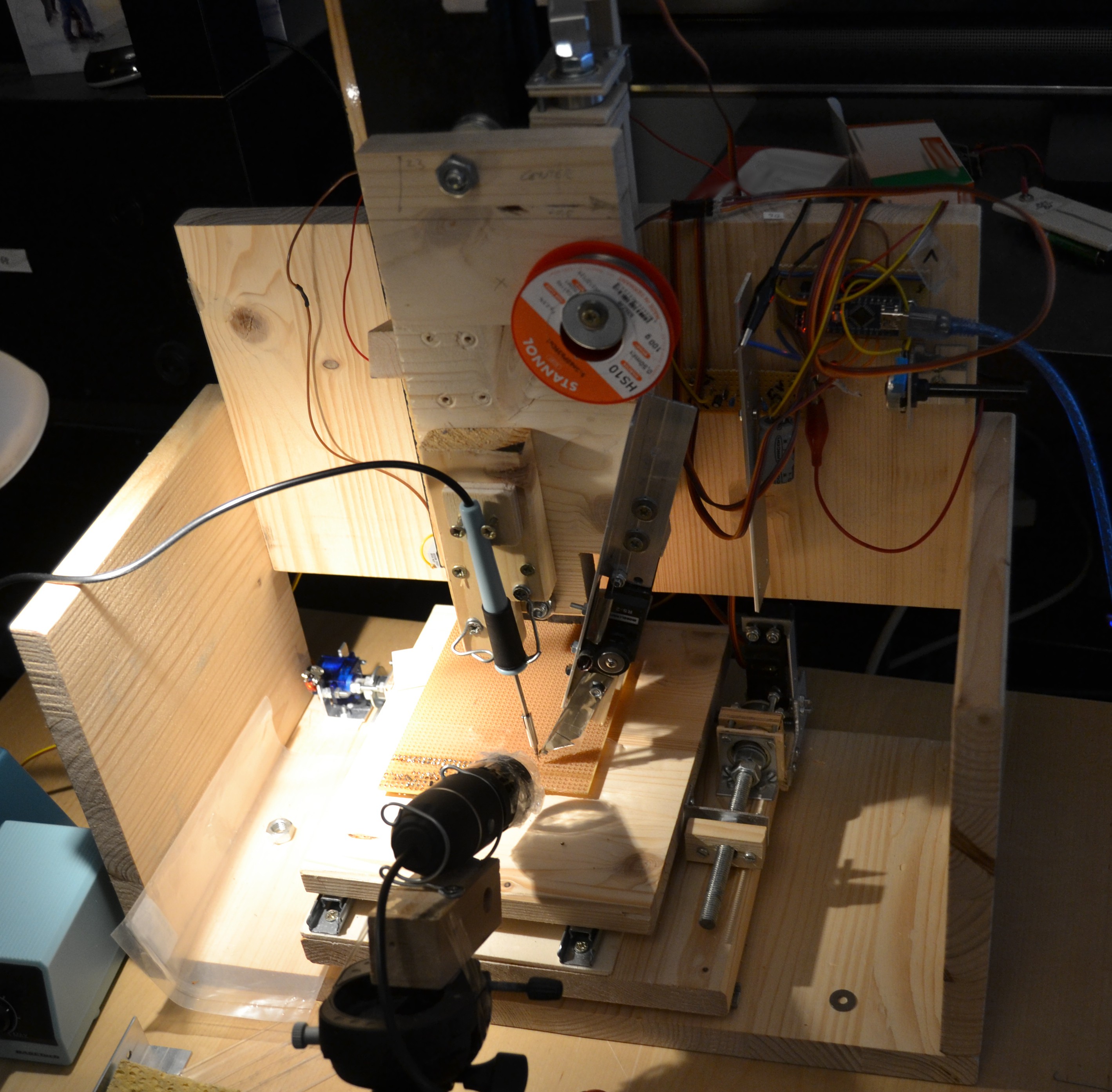
Luckily, you don't need a full grown CNC to manage that. This project aims to have manipulator for soldering and other tasks that is cheap, fun building it and fits inside a bookshelf while not used.
The challenge completing it is everything except tiny, but some components look promising:
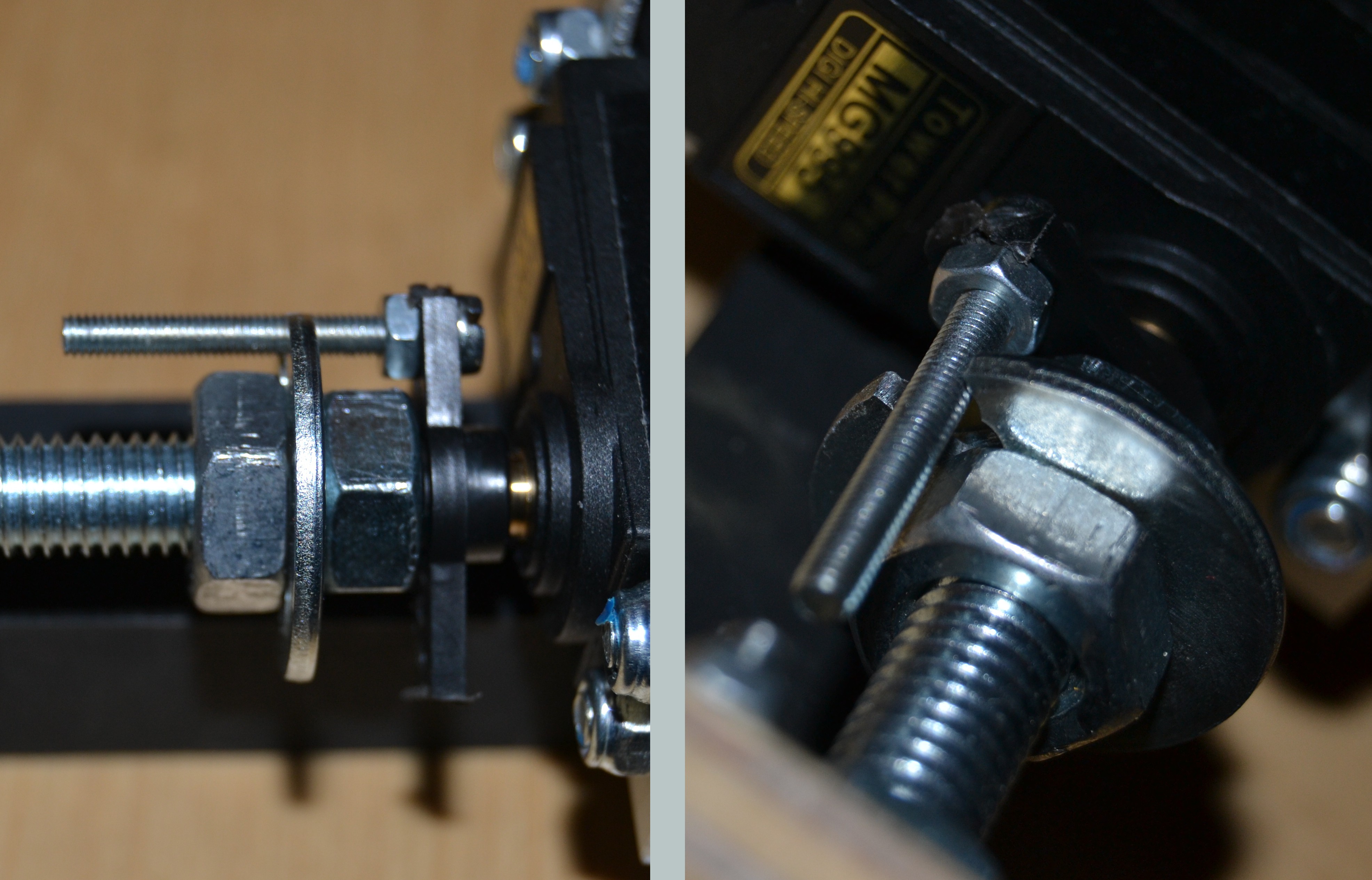
* hacked servos
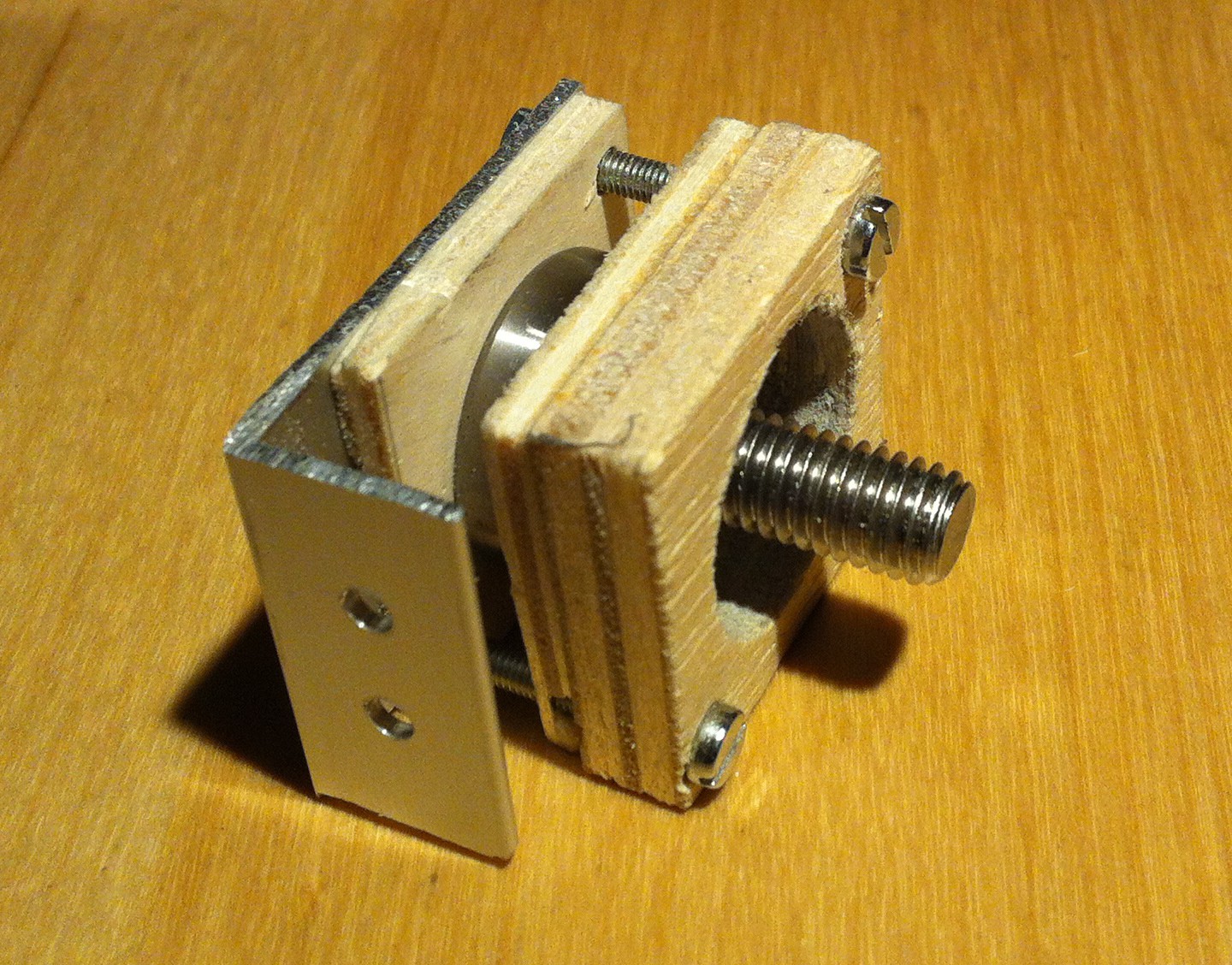
* threaded rods, skateboard ball bearings and ball bearing drawer slides
* µC with USB interface
* USB cam to guide manual operation
They're everywhere available at very low price while a "real" automatic soldering robot would be many $1000. The main difference would be Shelfie not being automated but intented for manual operation and much slower. Just to have it said. There are other advantages on Shelfie.
* Mount, controls and space for various tools and modifications
* Learning experience while building it
* Low cost: below 100 EUR
* Backyard design
Critique welcome!
---
---
Note: There is a similar project with a premanufactured CNC as component on hackaday already. While this is one million times better of course, the other one could be what you're after:
https://hackaday.io/project/20260-manual-smt-pick-and-place-machine




 Paul McClay
Paul McClay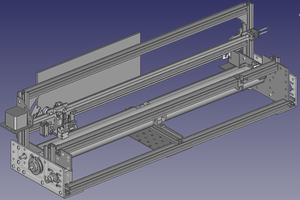
 Kārlis
Kārlis
 Alastair Young
Alastair Young
 Greg Duckworth
Greg Duckworth