0%
0%
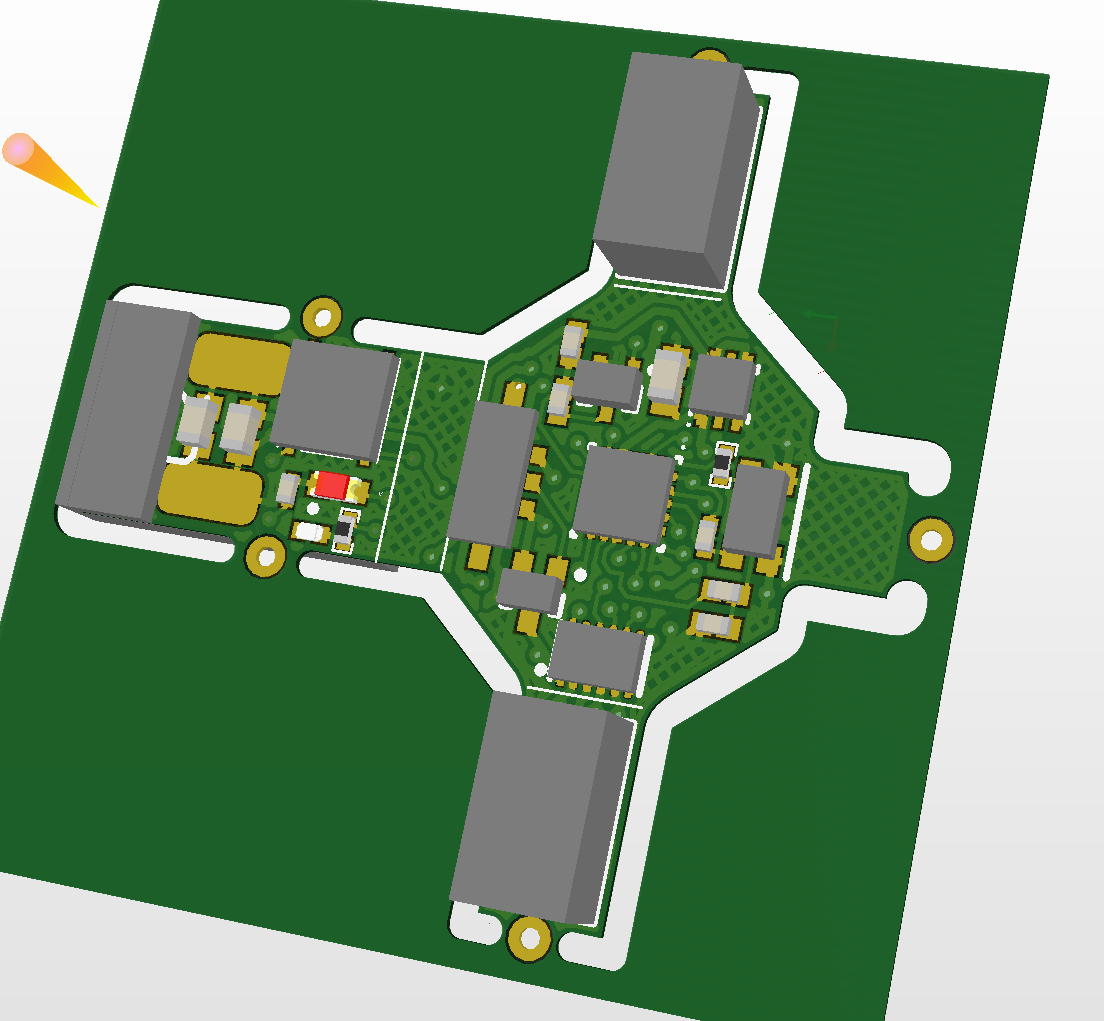
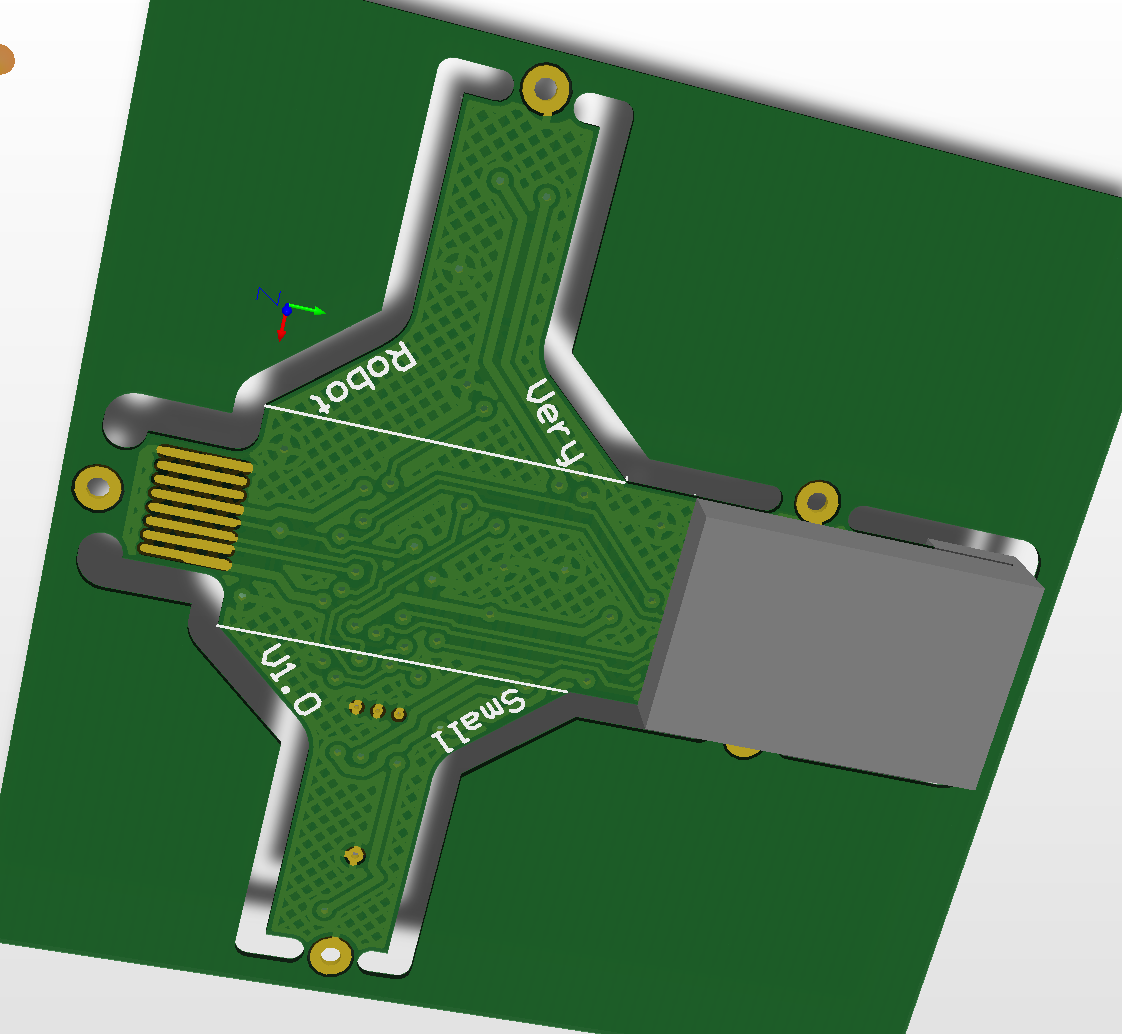
1.5g Robot
I wanted to make a robot that is impractically small.
 Joshua Elsdon
Joshua ElsdonBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Carl Bugeja
Carl Bugeja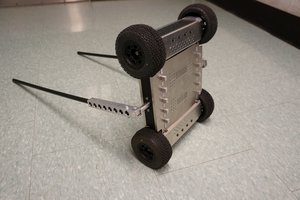
 Dominic Robillard
Dominic Robillard
 Pascal Buerger
Pascal Buerger
 Ted Huntington
Ted Huntington
Thanks for the hint. I have sent an email. Alternatively there are some Chinese suppliers that can do it, though flex seems much less streamlined from a hobbyist point of view.