0%
0%
Good sound from bad
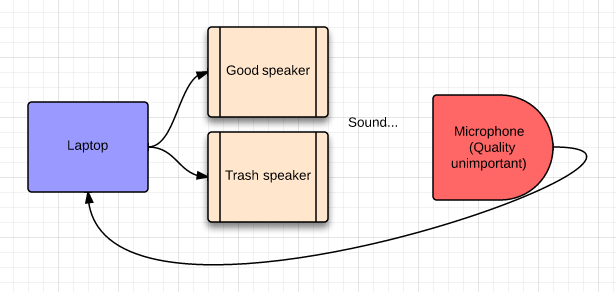
Lets use machine learning to make a bad speaker make good sound.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Alex Lungu
Alex Lungu
 2FTG
2FTG
 Inne
Inne
There has been a great deal of value to me in my involvement with the project. Would like to share it with the sound of text male voice team so they can also read it and implement something new.