0%
0%
 Jarrett
JarrettBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests














 mrpendent
mrpendent
 Jonathan Perry-Houts
Jonathan Perry-Houts
 Christoph
Christoph
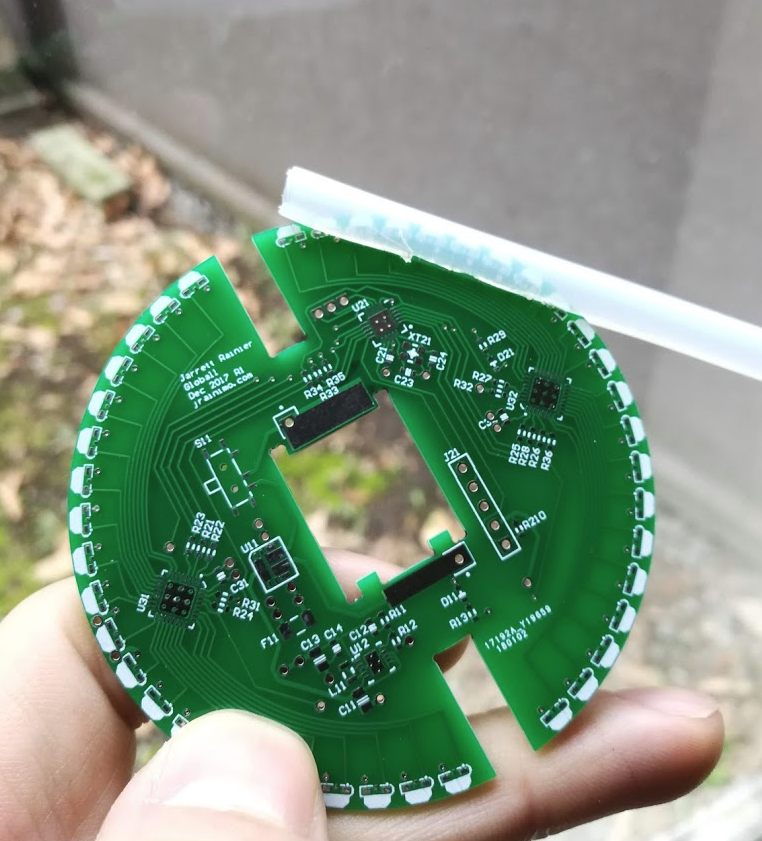
This is awesome. I have a background in geophysics and education, and this could make an amazing visualization/teaching tool for Earth process. A really cool extension of this idea would be to populate the inner part of the PCB as well, in order to visualize 3D structures within the Earth, although I can think of plenty of applications involving just the surface.