0%
0%
JVC to Clio
I want to use a JVC car radio with Renault Clio's built-in steering wheel remote
 Németh Csaba
Németh CsabaBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 jlbrian7
jlbrian7
 davedarko
davedarko
 Hari Wiguna
Hari Wiguna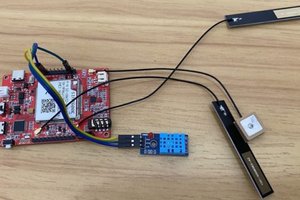
 electronicsworkshops
electronicsworkshops
Hey Nemeth,
Great job, I really appreciate the fact it works! I'm struggling with similar thing - JVC radio in a Renault Clio. Therefore, I would like to replicate your project. Could you share the schematics, please?