The main driving principles for this project are
- Resolution in the nanometer range - graphite would be nice.
- Build time of about six hours.
- Setup, troubleshooting, and testing in three hours.
- Cheap components.
In terms of tooling, the project needs are modest - a hacksaw, a drill, soldering iron, hot glue gun, etc. A band saw and a drill press are nice to have but not essential.
In terms of parts (excluding the data acquisition system), the cost is fairly low at under $100. The data acquisition system is the expensive part of the project. The National Instruments boards cost about $350.
Additional details are on my studentSTM page at my university. The link is on the left side of this page.
The best resolution recorded by my students so far is 5 nm. I have push it a bit further on my own and gotten fair HOPG pictures.



























 Quinn
Quinn
 Dan Berard
Dan Berard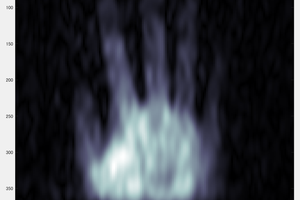
 yashiro
yashiro
 G.Vignesh
G.Vignesh