 Kevin Ferrare
Kevin FerrareBasically, you need to build the USB-ST4 interface described in the github project page and modify your control pad like explained here if it doesn't have an ST4 port.
Modifying the control pad means soldering and wiring an RJ12 socket to the pad buttons.
Once the hardware is done, you will need to install the ASCOM platform and the driver.
After this you can use a software like the open source stellarium to play with your telescope or PHD for astrophotography.
More details are available on the github project page.
Here is a small guide to use it with stellarium.
Sample video of the telescope moving:






 Louis H
Louis H

 atomkemp
atomkemp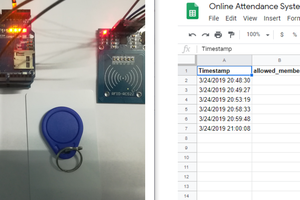
 Embedotronics
Embedotronics
NOTE: I eventually found a solution to this problem (see below), but here is the scenario:
My implementation for a telescope autoguider uses a standalone Atmega328. I communicate with it via an FT232 USB-Serial converter board. I can download an the Arduino Autoguider program to the chip. I can download Blink to the standalone 328 - it works just fine.
I am using an an autoguiding program called PHD2. PHD2 cannot communicate with the Arduino Autoguider because the computer only sees the FT232 board.
If I instead programmed the Arduino Autoguider program into an UNO board, (which means that I am now using the UNO’s onboard USB-Serial converter), the Arduino Autoguider program works just fine. The is no apparent clash between the autoguider and the FT232 drivers.
My question was: Should it be possible to communicate with the autoguider on the standalone Atmega328 via the FT232?
While I was writing up this post on the Arduino forum, I was prompted to look at this post “Standalone ATMEGA328 with CP2102 USB-Serial Converter”, which had not cropped up in my previous searches.
@iceeyes1992 – at the Arduino forum had the exact solution.
“i had the same problem.i had a atmega328p and a cp2102 with dtr pin.i tried different ways.after spend of 3 days i found the solution.
after burn bootloader to raw atmega328p with arduino as isp or usbasp you must choose only arduino pro or pro mini as your board in tools menu and one of the avr isp or arduino as isp or avr isp mkll as programmer.and then upload your sketch.that’s it.”
NOTE: I had burned a bootloader onto the Atmega328 earlier via the UNO board. And then had uploaded the Arduino Autoguider sketch, probably with Board: Arduino UNO selected – I think. Uploading worked fine, but PHD2 did not see the autoguider.The COM port was 4 and called something like “Serial Converter” when I was expecting to see “ArduinoST4 telescope driver (ASCOM)”.
So – following the advice from @iceeyes – I reconnected to the standalone ATmega through the FTP232 converter. I simply selected Board: “Arduino Pro or Pro Mini”. An extra field opens up – Processor, from where I selected the “Atmega328P (5V, 16Mhz)”. I then uploaded the Autoguider program again.
The PHD2 guiding program then saw the “ArduinoST4 telescope driver (ASCOM)” in the Mount selection list in PHD2. Success! Guiding is working fine.
(Note: PHD2 will not connect to the autoguider after the Arduino IDE has been connected to the 328. Messages received were COM4 denied or other times response too slow. I had to unplug the autoguider, then plug it in again. )
Bottom line – for standalone Atmega328 through USB-Serial converter, Select Arduino pro or pro mini as your board.
PS: I might be mistaken about some of the sequences, but became very confused while sorting out the problem over several days.