 frankstripod
frankstripodLike most hackers, I am fascinated by hobby multicopters, but something feels wrong when I see them in action. Then the subconscious mad scientist inside me starts solving problems that don't exist; Why are all multicopters steered by tilting them? You wouldn't drive your car everyday by tilting it (OK maybe some of you would.)

See Car Skiing https://en.wikipedia.org/wiki/Ski_%28driving_stunt%29
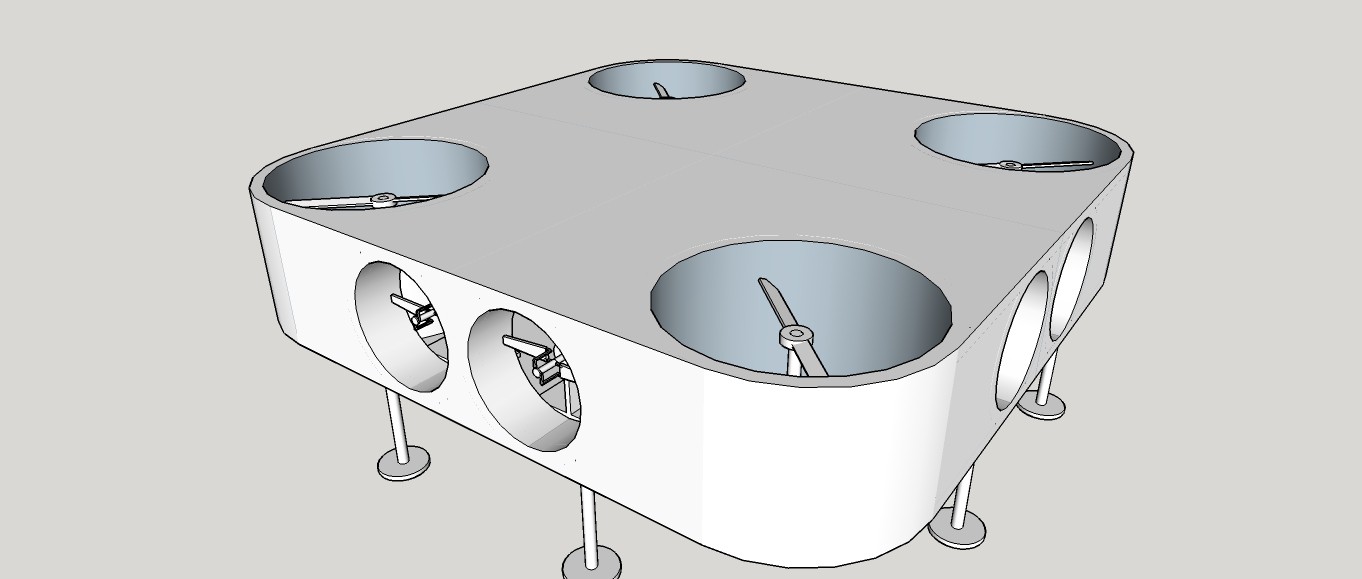
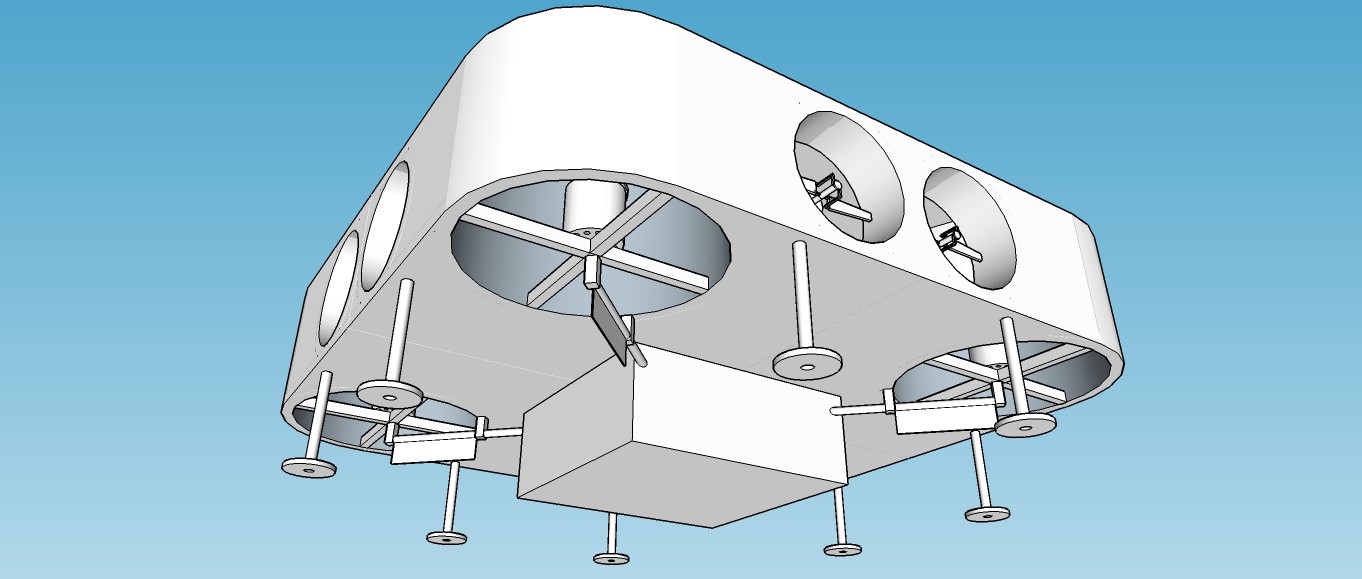
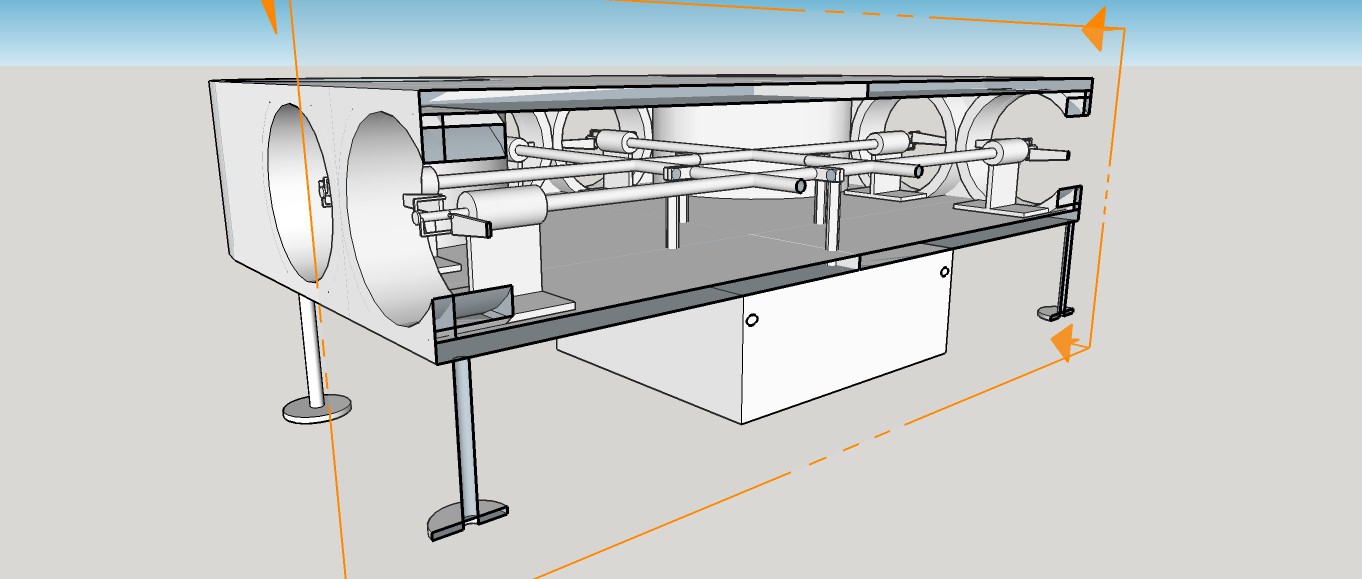
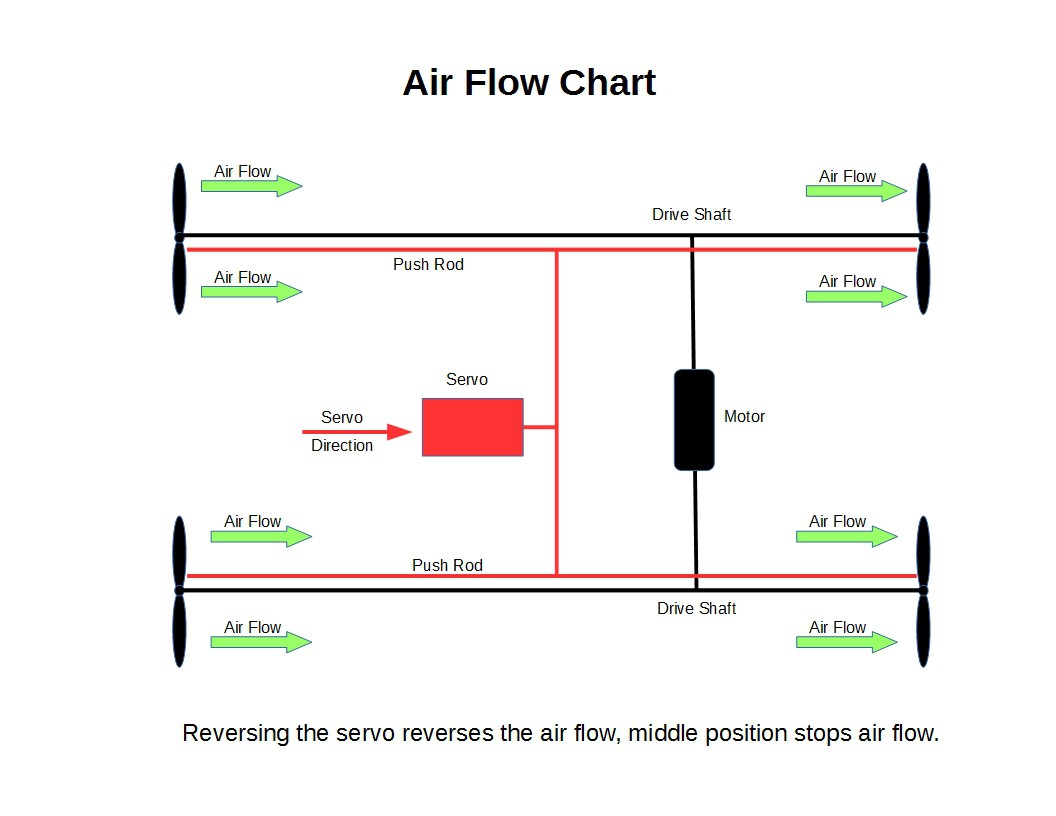
Concept: Two part aircraft mashed together. First, a stabilized quadcopter to remove the consequences of gravity, holding just the vertical Y position of an XYZ axis creating a virtual zero gravity vehicle. Second, a horizontal only thrust and break system that allows playing around on the horizontal XZ plane (like an air hockey puck with breaks.)
Unrealistic expectations:
- Mashing two systems together does not double the weight so that it never leaves the ground.
- Horizontal thrust and breaking dramatically reduces acceleration and deceleration times.
- Starting this project will not side track me into a 3D positioning system using something like OpenMV.
- Pilots can be easily replaced by computers.
- This is a new concept no one ever thought of before, and even though I have little experience, I will not need much help.





 Bharbour
Bharbour
 Les Hall
Les Hall
 Avye
Avye
 Jamie
Jamie
I'm a big fan of unconventional drone projects. I think you could whip up a rough prototype using glued-together hot-wire-cut foam blocks, or just add a few motors onto an existing quad. Very cool!