0%
0%
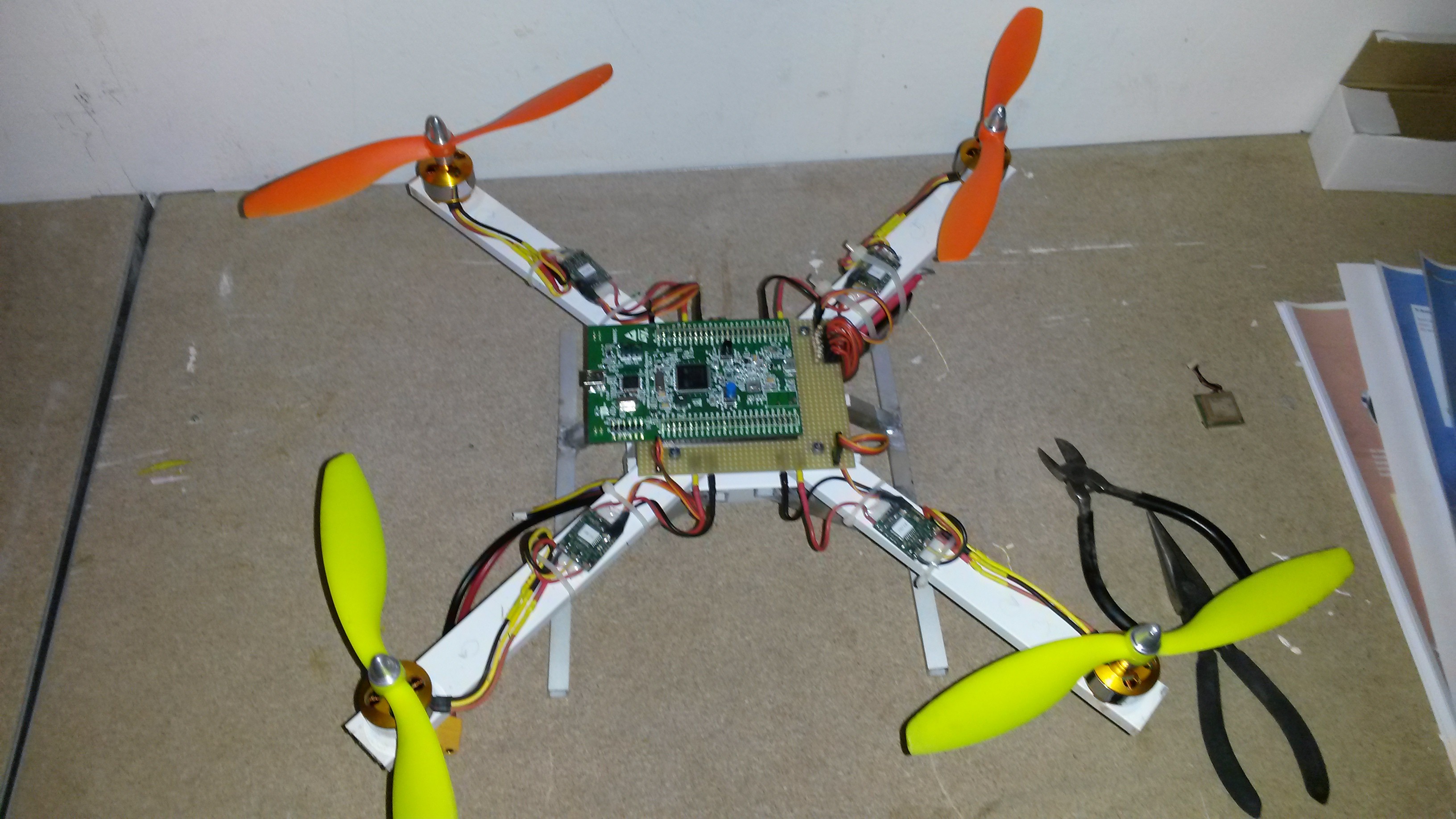
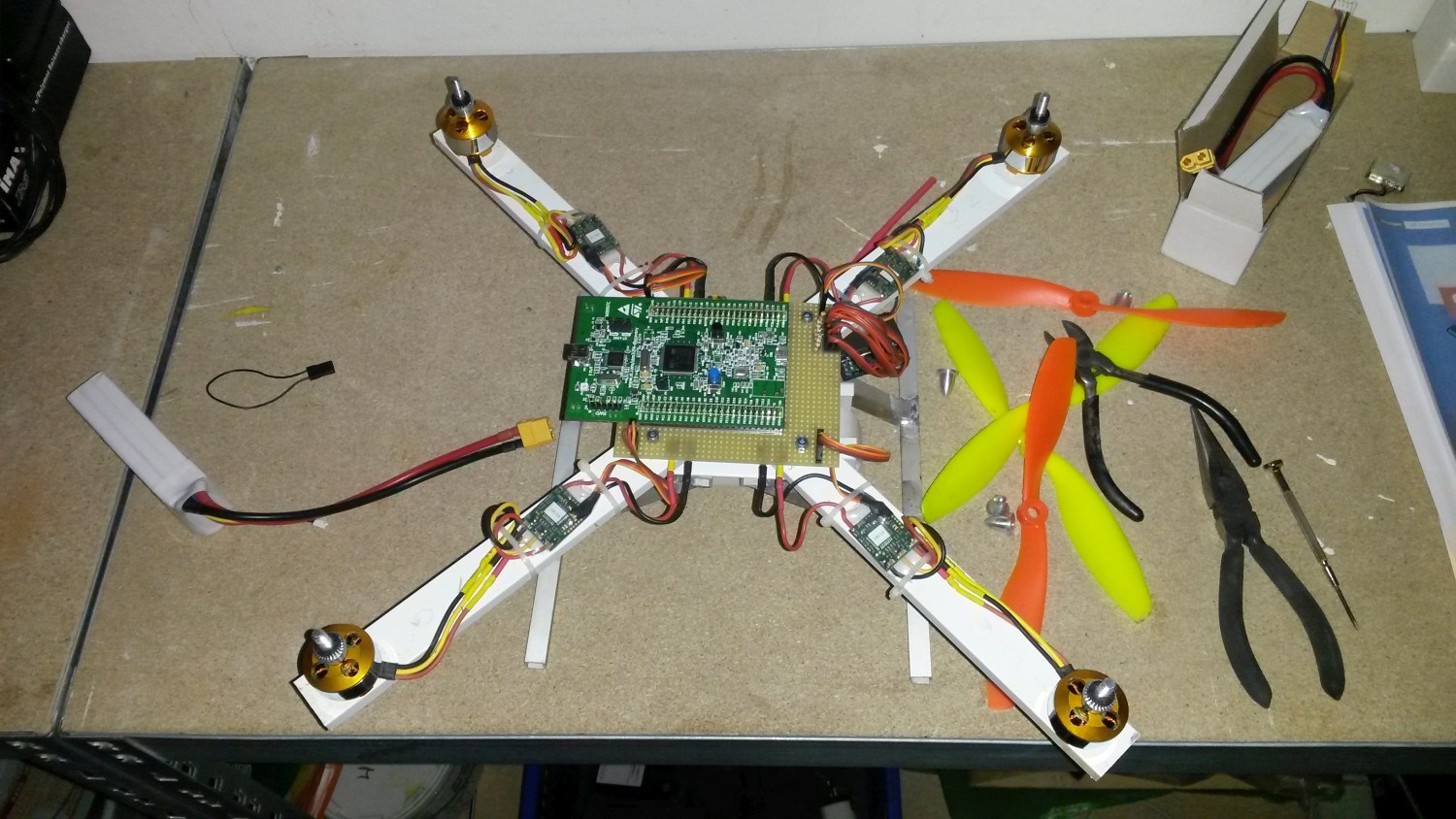
DIY Quadrocopter
Yet another Quadrocopter - built from scratch. Running on a STM32 evaluation board.
 hebel23
hebel23Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Sensors...
Sensors...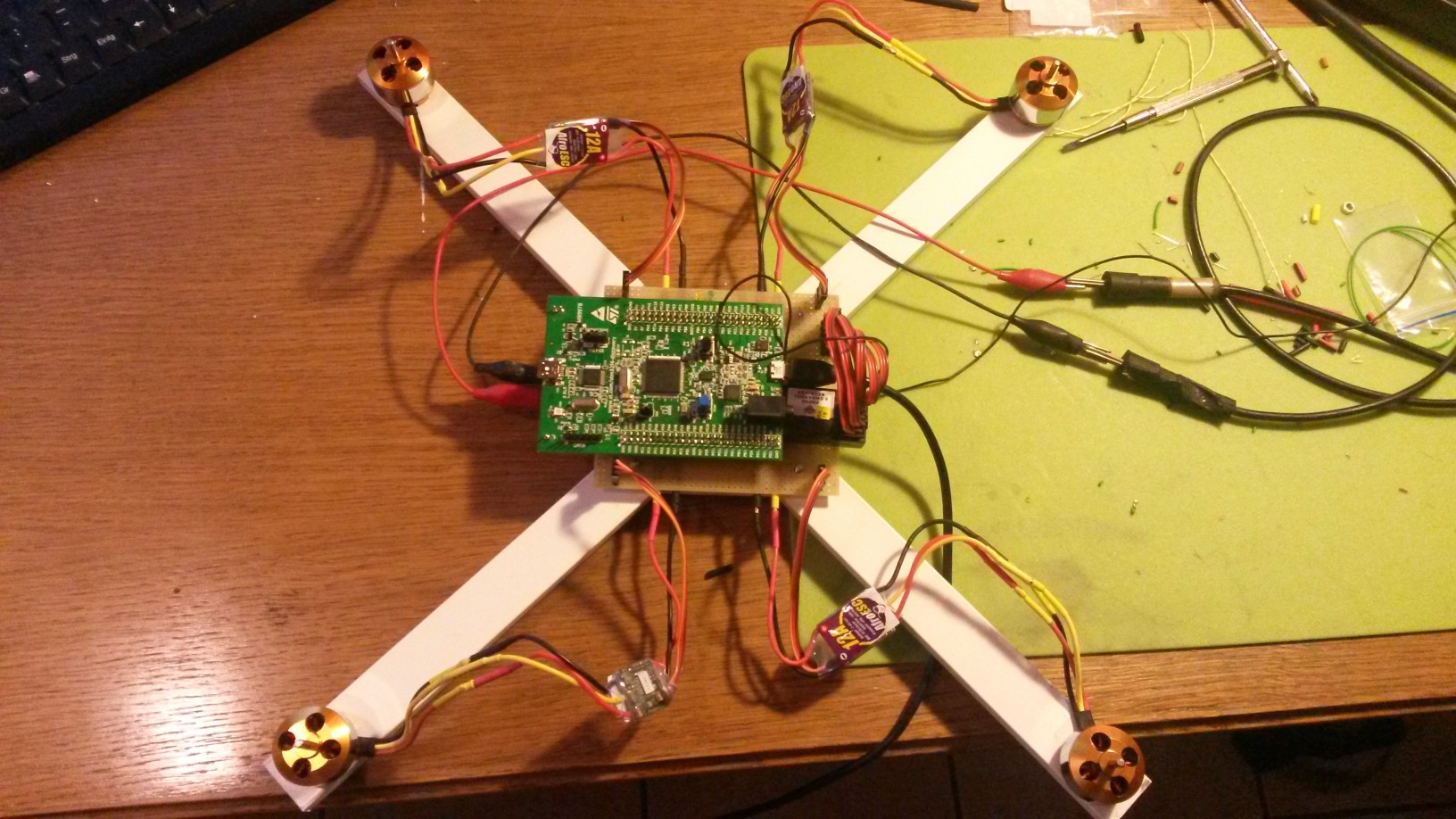






 StéphaneAG
StéphaneAG
 Ben Lim
Ben Lim
 Tanmay Karpe
Tanmay Karpe
Can you share your code? Thank you.