0%
0%
Crunchtrack
The smallest open source GSM+GPS+CAN board ever
 Mastro Gippo
Mastro GippoBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



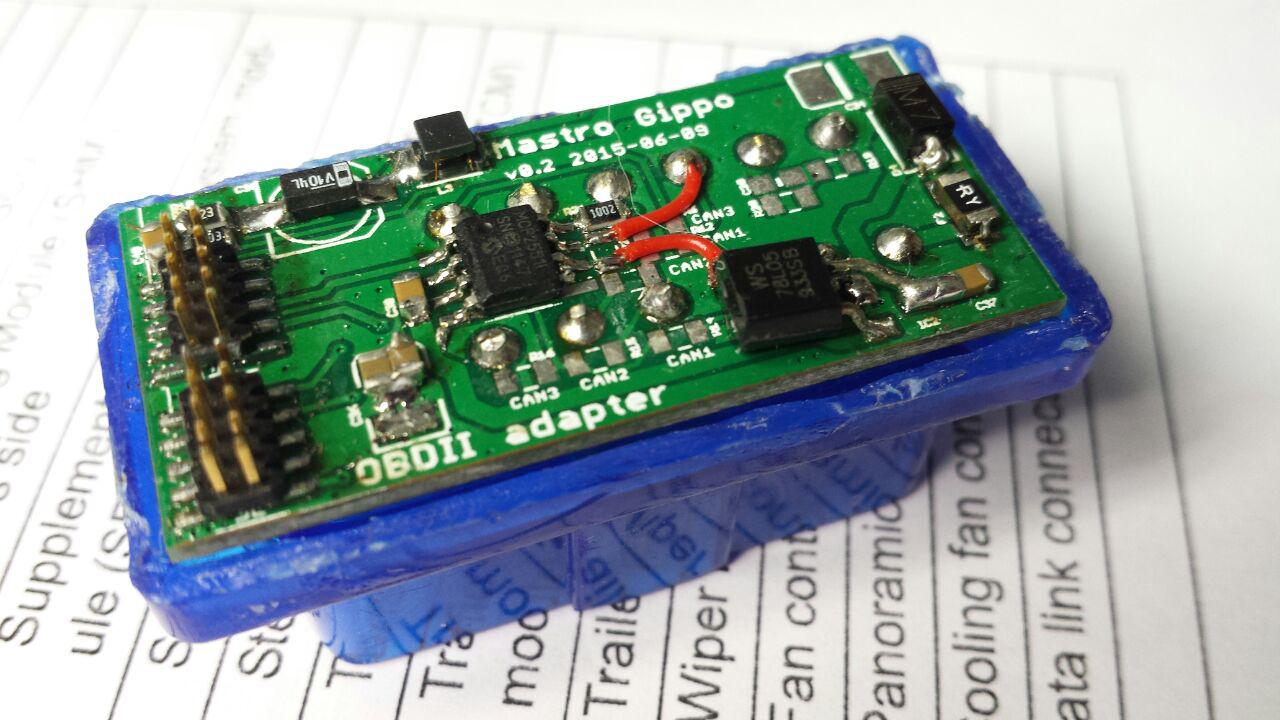


 That didn't work of course, and I messed it up beyond repair, a very nice excuse to start working on the second prototype.
That didn't work of course, and I messed it up beyond repair, a very nice excuse to start working on the second prototype.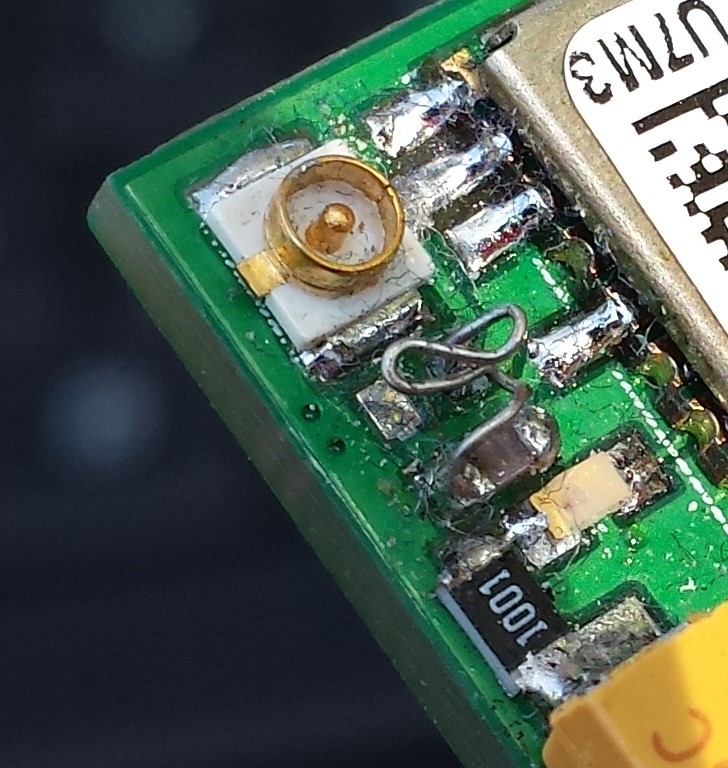







 charliex
charliex

 Paul Kocyla
Paul Kocyla
 Jared
Jared
Mastro, great project and I love the small size. The website is also a fun concept. I know a guy here in the Detroit area that was thinking about a similar concept for a website. Check out slide 37. Don't think the site ever got up and running though. http://www.canbushack.com/defcon19/workshop.pptx