M.daSilva
M.daSilva-
First launch
11/03/2015 at 12:29 • 0 commentsWell, this is awkward.
The launch occurred nearly two months ago! I completely forgot to write about it! So many things in mind...
So, the rocket was launched on august 28, with a perfect weather. The engine ignited as it should, and the rocket flew straight as an arrow. After apogee the D12-5 engine fired the ejection charge. However, I didn't put enough wadding, and the parachute melted a bit, resulting in a mess of plastic of wires instead of the nice deployment I expected. Nevertheless, it slowed the rocket enough, and the rocket landed without any damage. The upper half landed nose first and got stuck in the ground.
![Rocket at landing. Nothing got broken, but still...]()
The logger worked as planned: it didn't trigger until launch, and the beacon activated 30s after takeoff.
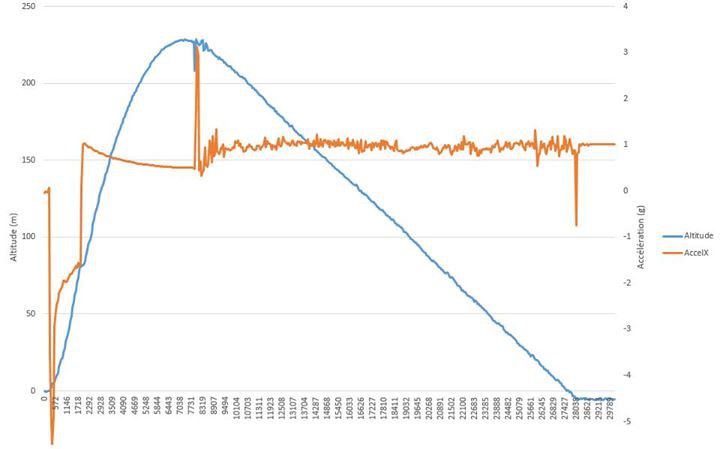
Data recovered from the MicroSD card got processed in an Excel file. Vertical acceleration and altitude were plotted in a time-based graph.
![]()
We can clearly see the initial acceleration provided by the engine, and the engine burnout, at which point the altitude rise slowed down. The two peaks we can see afterwards come from the parachute deployment and final landing. I was able to calculate a speed of 244 km/h at takeoff, and a descend speed of 42 km/h, which can be explained by the failed parachute deployment.
For those interested, the spreadsheet containing calculations and the graph is available here.
-
Rocket Design
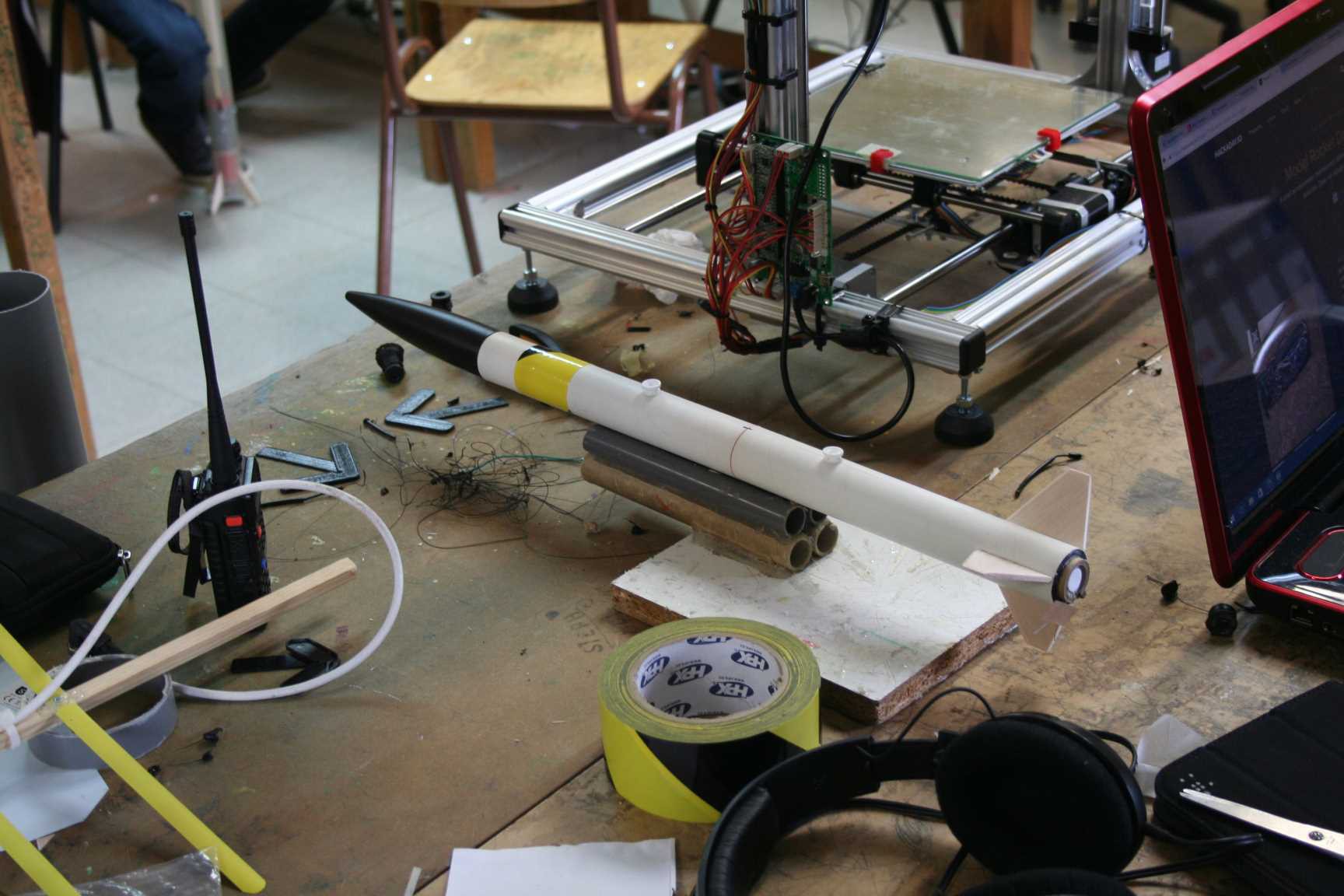
08/30/2015 at 19:36 • 1 commentThe test rocket was built at Euro Space Center, Belgium, during a rocket building camp I had the pleasure to help with. The process was pretty much straightforward.
I used a standard Estes BT-55 body tube, with the ability to split in half, thus allowing me to install the module in the upper part. The parachute would stay in the lower part.
![]()
For this test, I used a D12-5, and a trashbag parachute. The nose cone is an Estes NC-55. I figured out the stability with OpenRocket, and the fins were designed to allow a stability of around cal 3.0.
![]()
The motor mount is made of rolled paper, the spacers are 3D printed.
The actual data logger sits at the top of the rocket: I just need to remove the nose cone to swtich on the module, and I can easily reprogram the module if I need to.
![]()
While testing the module inside the rocket, I noticed the accelerometer didn't register the launch impulse on every try! That was quite annoying, and even after installing a few decoupling caps, the problem was still there. After looking for different causes, I figured out that the radio transmitter was at cause: the emission was creating RF interference, causing the accelerometer to spit out stupid values. To fix that, I just modified the script a bit: the radio sends a tone, stops, THEN the accelerometer switches on. I tried it 30 times after that mod, and the accelerometer triggered the recorfding 30 times. Good enough for me!
-
Small snags
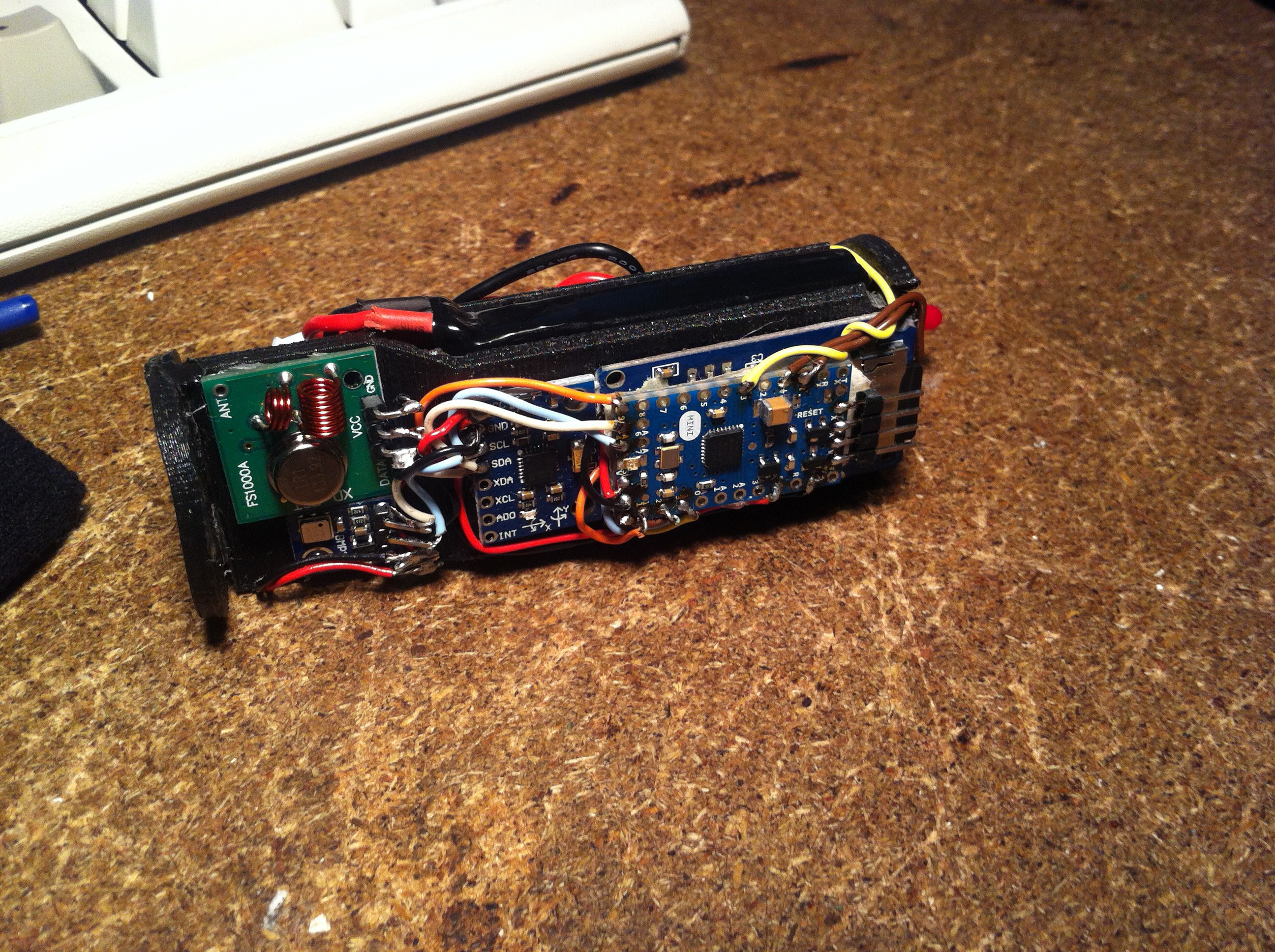
08/13/2015 at 22:12 • 6 commentsI ran into a small problem: the Arduino module is too big, and I can't fit the SD card reader inside!
So back to the drawing board!
![]()
I chose a smaller Arduino Mini board stacked on top of the SD reader. I had to chop some plastic off the support I printed to allow the slot to be exposed. The programming header is also broken out, to allow future debugging/reprogramming, without having to take the whole thing out of the rocket.
-
Printed the structure, microcontroller in!
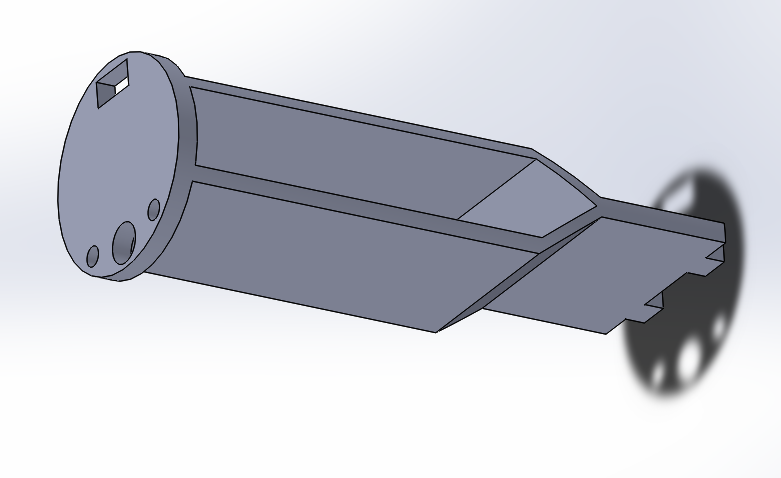
08/13/2015 at 20:22 • 0 commentsThe actual holder is pretty simple: a V-shaped structure hold the battery in-between the electronics.
One slot is used for the USB ports (for programming purposes), one switch and two LEDs (power and status) are also planned.
Another disc is snapped in at the bottom.
![]()
Didn't take any pics of the printing in progress, but here it is after I started to fit the microcontroller.
![]()
The altimeter is also in, along with the radio module!
![]()
So far so good, the whole thing fits perfectly in the body tube, along with the batteries!
I still have to put in the SD reader and the step-down regulator.
-
Challenges
08/13/2015 at 20:00 • 0 commentsAll right, so the first things I had to think about were the following:
- What do I want to measure?
- How big do I want it to make (for what class of rocket?)
- For what price?
For the sensors, I settled for three measurements:
- Acceleration
- Temperature
- Height (calculated from the atmospheric pressure)
The acceleration will be measured by a MPU6050, pressure and temperature by a BMP180.
I'll throw in an Arduino for the processing, a SD card reader for logging purposes, and a small radio module as a beacon (and maybe later telemetry...)
I want the whole thing to fit in a small-sized model rocket (C or D class engine). I settled for a BT-55 size, which uses a 32mm inner diameter tube. I'd like the assembly to be able to slide in and out of the tube easily.
My initial budget will be around 20€, we'll see later on the total cost... I'll mainly use chinese breakout boards, to reduce the costs as much as possible...
Model Rocket Data Logger
A small accelerometer, thermometer, altimeter, SD card logger, with a radio downlink. Does not include Kerbal life support.