 Robin Fröjd
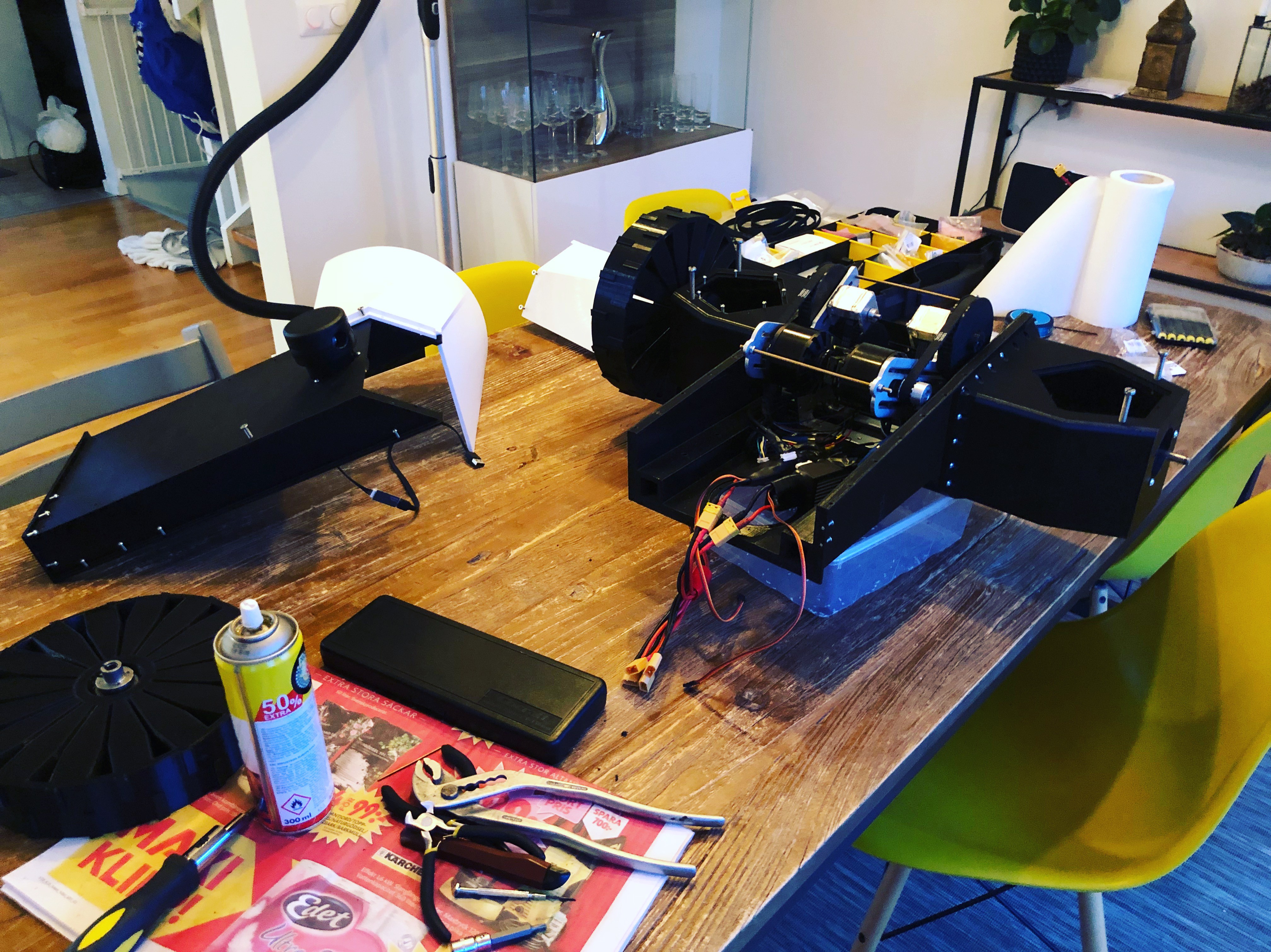
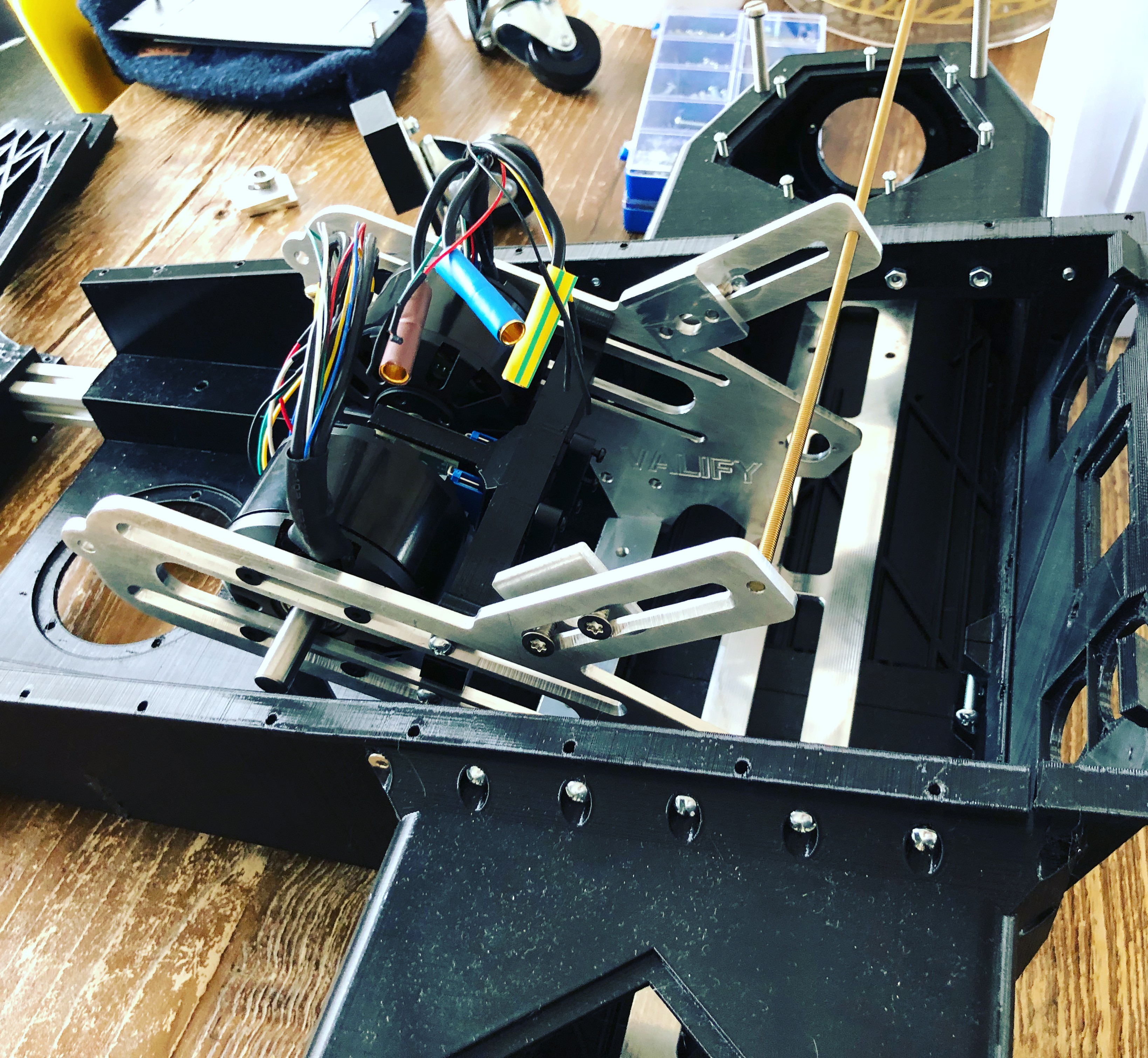
Robin FröjdValify Robotic lawnmower. A hobby project created with a great interest in technology.

A robotic lawn mower is an autonomous robot used to cut lawn grass. A typical robotic lawn mower requires the user to set up a perimeter wire around the lawn that defines the area to be mowed.
The robot uses this wire to locate the boundary of the area to be trimmed and in some cases to locate a recharging dock. So this project was born in my mind when I bought my first house and invested in a Robomow RC312 for the garden. Running it for almost 2-years I
encountered lot of problems with the existing “brains” and basic
functionality of the “robot”. So I started thinking of ways to improve this. After a some research. It seemed that technology existed to build a really smart robot that could make its own decision and adapt itself to the garden. Looking up different solutions on how to solve this, I found the RTK technology was very interesting. But a bottle neck existed, the GPS signal needed to be quite strong to receive centimeter accuracy (would not work well with trees and other items that cover the satellite reception).

Combining the RTK with Lidar sensors, Intel® RealSense™ 3D Camera and the odometry coming from high-resolution rotary position sensors on the motors would maybe give the needed accuracy for autonomous lawnmower that could 3D map the garden and make its own decision based on the environment with centimeter accuracy.

The goal is to have the ability to create virtual boundaries around objects and the flexibility of adapting to environment changes without today's hazzle with perimeter wires.

I believe that in the next few years all new mowers will have the ability to navigate without the perimeter wire. A transition to actual autonomous robots will happen and this is my development project entering the world of robotics.


















 newdrive
newdrive
 saipraveen
saipraveen
 Anthrobotics
Anthrobotics
 Darren V Levine
Darren V Levine
I need one of these so, so much.
Amazing project!