 Rob
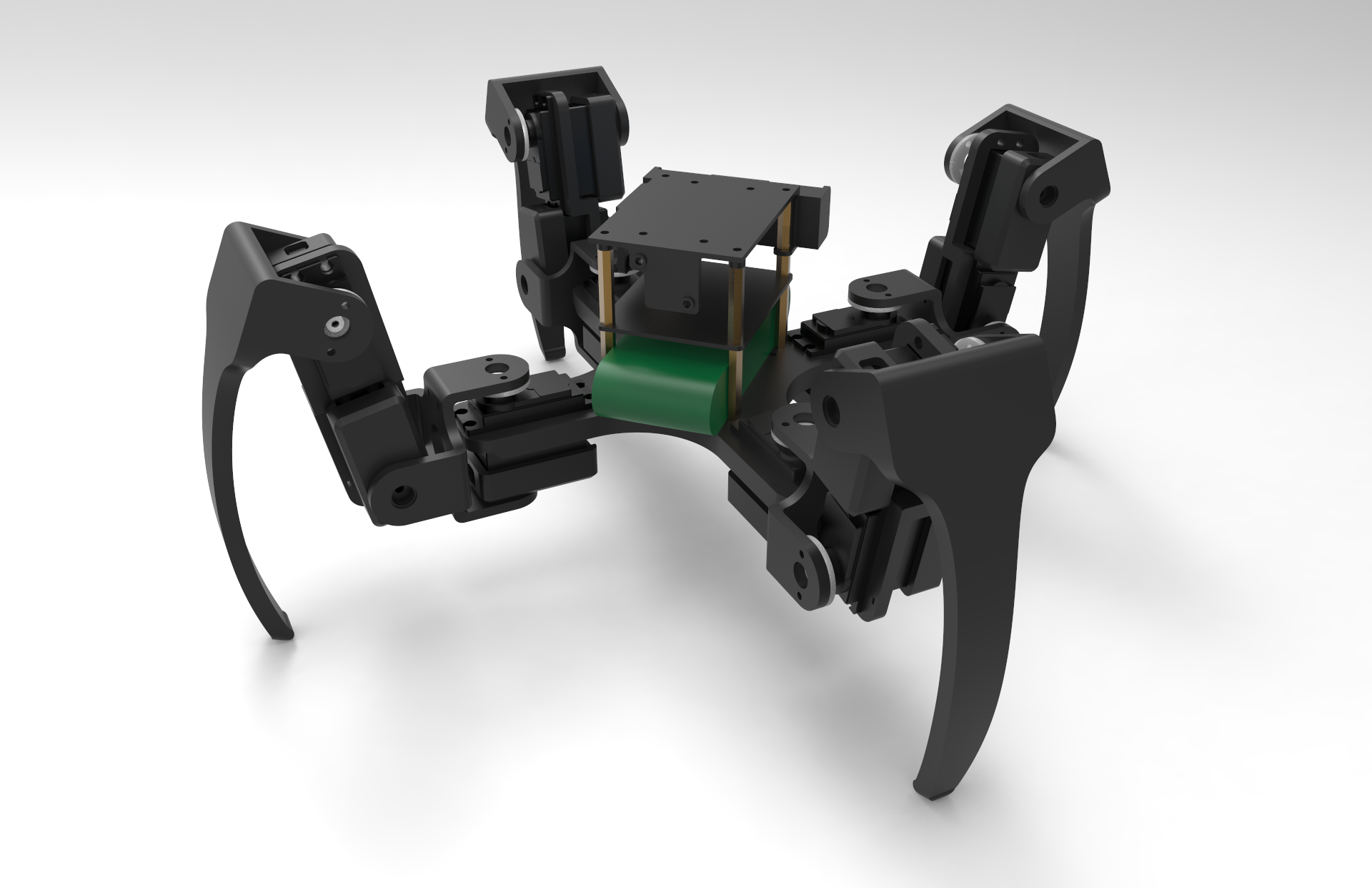
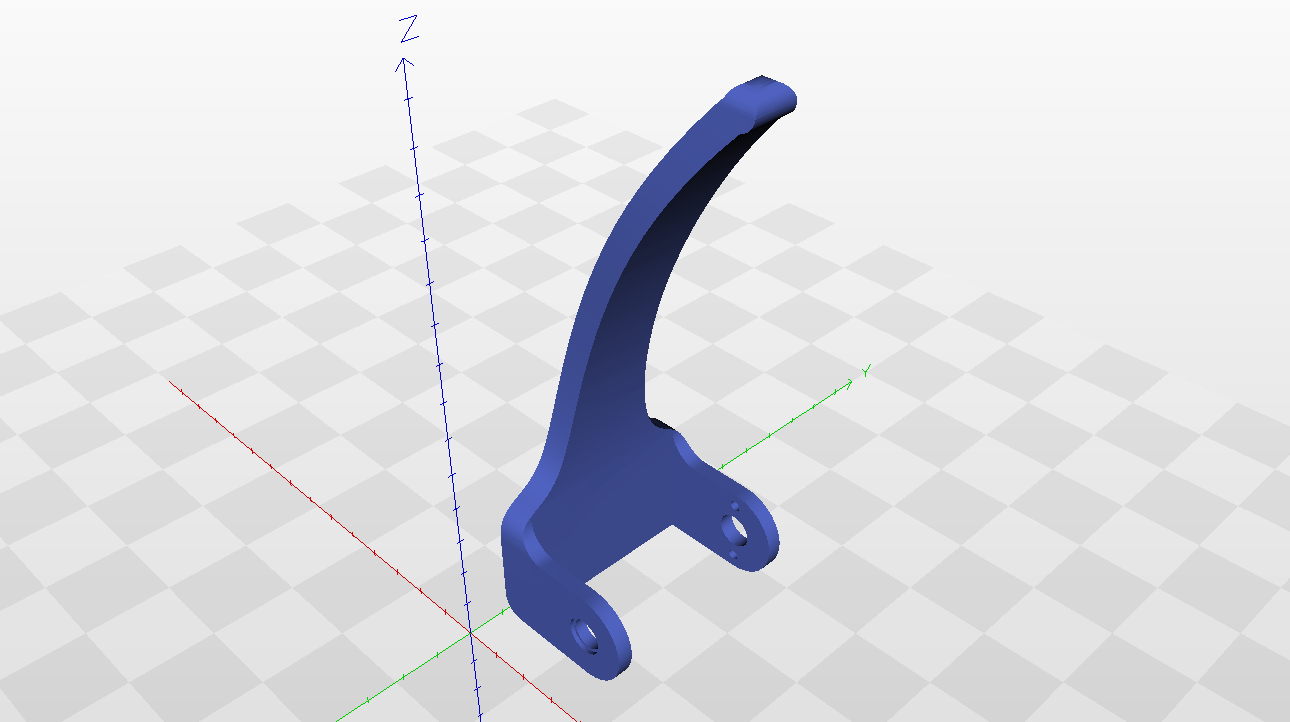
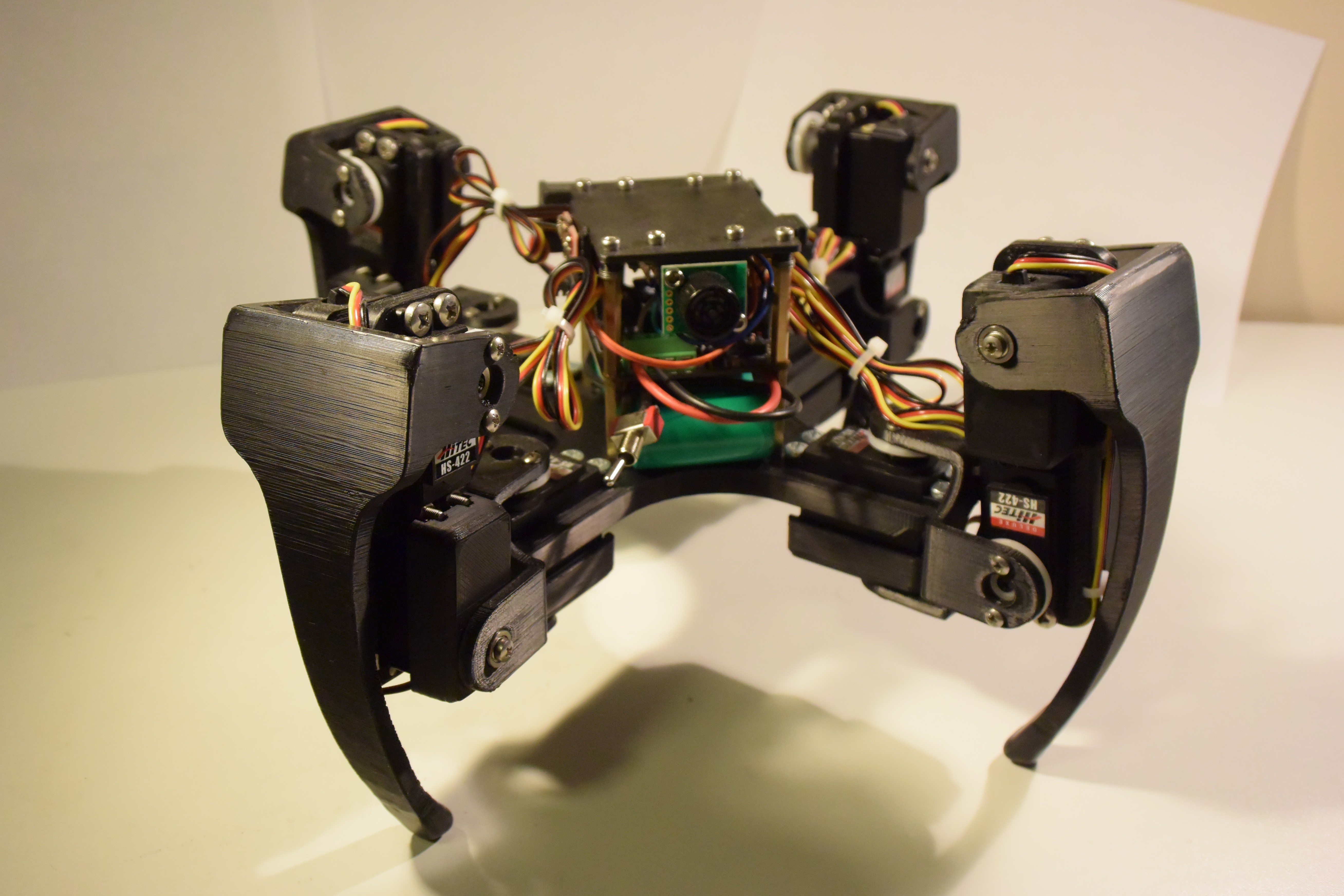
RobI am a strong believer in simple design with as few unique components as necessary, thus Quadrup3D is build up of only 6 simple parts! You will need 1 X base, 1 X electronics bracket, 12 X servo brackets, 4 X Shoulder, 4 X Femur and 4 X Tibia. If The .STL files for printing your own Quadrup3D are available for download below.
You can find the Python code running locally on the Raspberry Pi Zero here: https://github.com/RobWks/Quadrup3d
This work is licensed under a Creative Commons Attribution 4.0 International License.
Thanks to Karol Rabalski for the great pictures.





 jacksonliam
jacksonliam
 Daniel Resio
Daniel Resio
 sujoy2900
sujoy2900
 jdelbe
jdelbe
Ok - i need to print one of these up - do you have those .stl files?