-
RPLIDAR and ROS programming- The Best Way to Build Robot
05/07/2019 at 06:36 • 0 commentsAs LIDAR becomes more and more popular in different areas, including self-driving cars, robotics research, obstacle detection & avoidance, environment scanning and 3D modeling etc., we’ve also got many inquiries about RPLIDAR recently. Why it's a good product for research in SLAM (not the NBA news magazine of course!)? What software is recommended for RPLIDAR and robotic applications?
Here we go! We’ve prepared a guide with details about how to quickly learn software and hardware for RPLIDAR and apply SLAM in robotic research!
A Brief Background of ROS and Lidar
As a robot software platform, ROS provides similar operating system functions for heterogeneous computer clusters and plays an important role in research of robot walking. However, as the core sensor of robot positioning navigation, Lidar plays an important role in robot autonomous walking and positioning navigation. RPLIDAR is the ideal cost-effective sensor for robots and hardware researchers and hobbyists. The combination of the ROS and RPLIDAR will definitely make the robot autonomous positioning navigation better.
The tutorial for ROS well explains ROS as the open-source software library, it is greatly used by robotics researchers and companies.
1.What is RPLIDAR?
RPLIDAR is a low-cost LIDAR sensor suitable for indoor robotic SLAM application. The produced 2D point cloud data can be used in mapping, localization and object/environment modeling. RPLIDAR will be a great tool using in the research of SLAM (Simultaneous localization and mapping)
Right now, there are three kinds of RPLIDAR for different features.
RPLIDAR A1M8 is based on laser triangulation ranging principle and uses high-speed vision acquisition and processing hardware developed by SLAMTEC. The system measures distance data in more than 8000 times per second.
RPLIDAR A2M5/A2M6 is the enhanced version of 2D laser range scanner(LIDAR). The system can perform 2D 360-degree scan within 18-meter range. The generated 2D point cloud data can be used in mapping, localization and object/environment modeling.
RPLIDAR A3 can take up to 16000 samples of laser ranging per second with high rotation speed. And equipped with SLAMTEC patented OPTMAG technology, it breakouts the life limitation of traditional LIDAR system so as to work stably for a long time.
RPLIDAR Application Scenarios
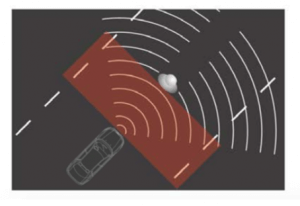
[caption id="attachment_18629" align="alignleft" width="300"]
![Obstacle detection and avoidance]() Obstacle detection and avoidance[/caption]
Obstacle detection and avoidance[/caption]
[caption id="attachment_18630" align="alignleft" width="300"]![Environment scanning and 3D modeling]() Environment scanning and 3D modeling[/caption]
Environment scanning and 3D modeling[/caption]
[caption id="attachment_18628" align="alignleft" width="300"]![Multi-touch technology and man-machine interaction]() Multi-touch technology and man-machine interaction[/caption]
Multi-touch technology and man-machine interaction[/caption]
[caption id="attachment_18631" align="alignleft" width="300"]![Robot simultaneous localization and mapping]() Robot simultaneous localization and mapping[/caption]
Robot simultaneous localization and mapping[/caption]2. Overview of ROS Package for RPLIDAR
This package provides basic device handling for 2D Laser Scanner RPLIDAR A1/A2 and A3.
Through the wiki, you can learn about the description and usage flow of the corresponding RPLIDAR products, interfaces and parameters, as well as the latest version information of the current ROS support.
In any package of ROS ecosystem, you only need to find the corresponding wiki and github page, you can clearly understand its data interface and internal implementation.
The github of rplidar_ros mainly contains the source code of the package and the version management and developer problem dialogue of the package.
![The github of rplidar_ros]()
Any problem with the...
Read more »
This user joined on 05/07/2019.
 Obstacle detection and avoidance[/caption]
Obstacle detection and avoidance[/caption]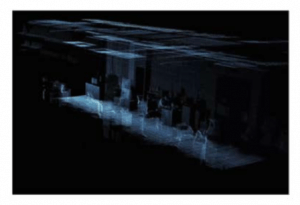 Environment scanning and 3D modeling[/caption]
Environment scanning and 3D modeling[/caption]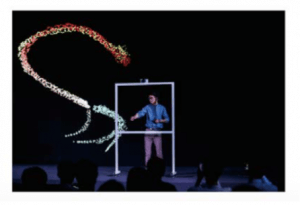 Multi-touch technology and man-machine interaction[/caption]
Multi-touch technology and man-machine interaction[/caption]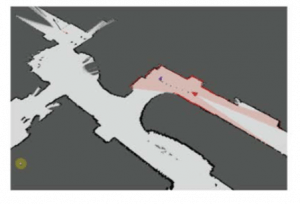 Robot simultaneous localization and mapping[/caption]
Robot simultaneous localization and mapping[/caption]
 Víctor Mayoral Vilches
Víctor Mayoral Vilches Hexastorm
Hexastorm Alex Klimaj
Alex Klimaj Danny FR
Danny FR Henrik Langer
Henrik Langer Lucy Fauth
Lucy Fauth Jon Klein
Jon Klein Dmitry
Dmitry jareklupinski
jareklupinski jay-t
jay-t j0z0r pwn4tr0n
j0z0r pwn4tr0n Cary W.
Cary W. Adellar Irankunda
Adellar Irankunda hewball
hewball