Overview
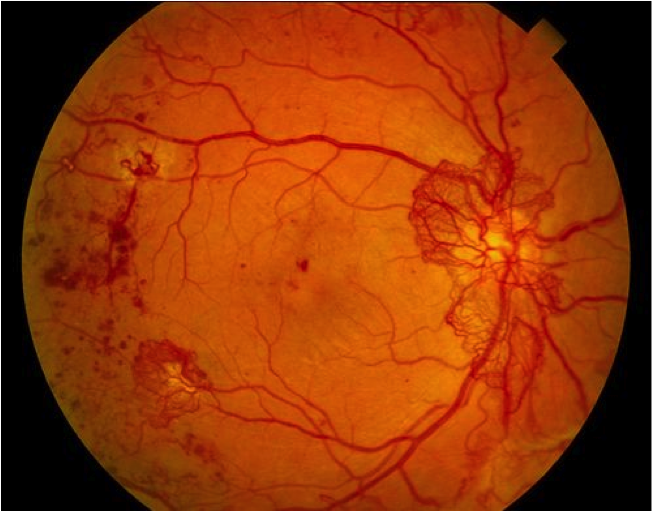
Currently there are over 422 million people worldwide suffering from diabetes. 28.5% of them suffer from Diabetic Retinopathy(1) . 50% of diabetics are unaware about the risk of losing their vision(2). The number of cases of diabetic retinopathy increased from 4 million in 2000 to 7.69 million in 2010 in US alone. Early detection and Treatment can help prevent loss of vision in most cases.
Detection of Diabetic Retinopathy, requires expensive devices for Retinal Imaging , even the cheapest of them costing more than $9000 each. This makes good quality eyecare, expensive and inaccessible to the less privileged. The key idea in the development of OIO(code-named Project OWL) is to provide an affordable solution to help identify DR and hence prevent cases of "avoidable blindness".
What is OIO?
OIO(OWL) is an idea conceived in the Fall 2015 MIT Media Lab Engineering Health Course. Development of the electronics, enclosure, and optics have continued since Spring 2016 at the Srujana Innovation Centre at the LV Prasad Eye Institute, Hyderabad, India. It aims at capturing good quality retinal images using an affordable device, mainly to help make identification of Diabetic Retinopathy accesible to all.
Key Features:
- Ultra Low Cost: Under $400, compared to its contemporaries
- Open Source and Design: Expands the scope of the device worldwide
- High Portability: Weighs less than a laptop
- Intuitive interface: No specialized training needed to operate the device, making it perfect for use in rural areas

This work is licensed under a Creative Commons Attribution 4.0 International License.
The Team:
Dhruv Joshi: Team Coordinator + Deep Learning
Sandeep Vempati: Engineering Lead
Tristan Swedish: Original Design + Deep Learning + Optical Improvements
Devesh Jain: Original Design
Dr Nag Konda
Sankalp Modi
Ebin Philip
Ayush Yadav
Aamir Jowher
Nish Mohith Kurukuti
Deepika Dixit
How it works?
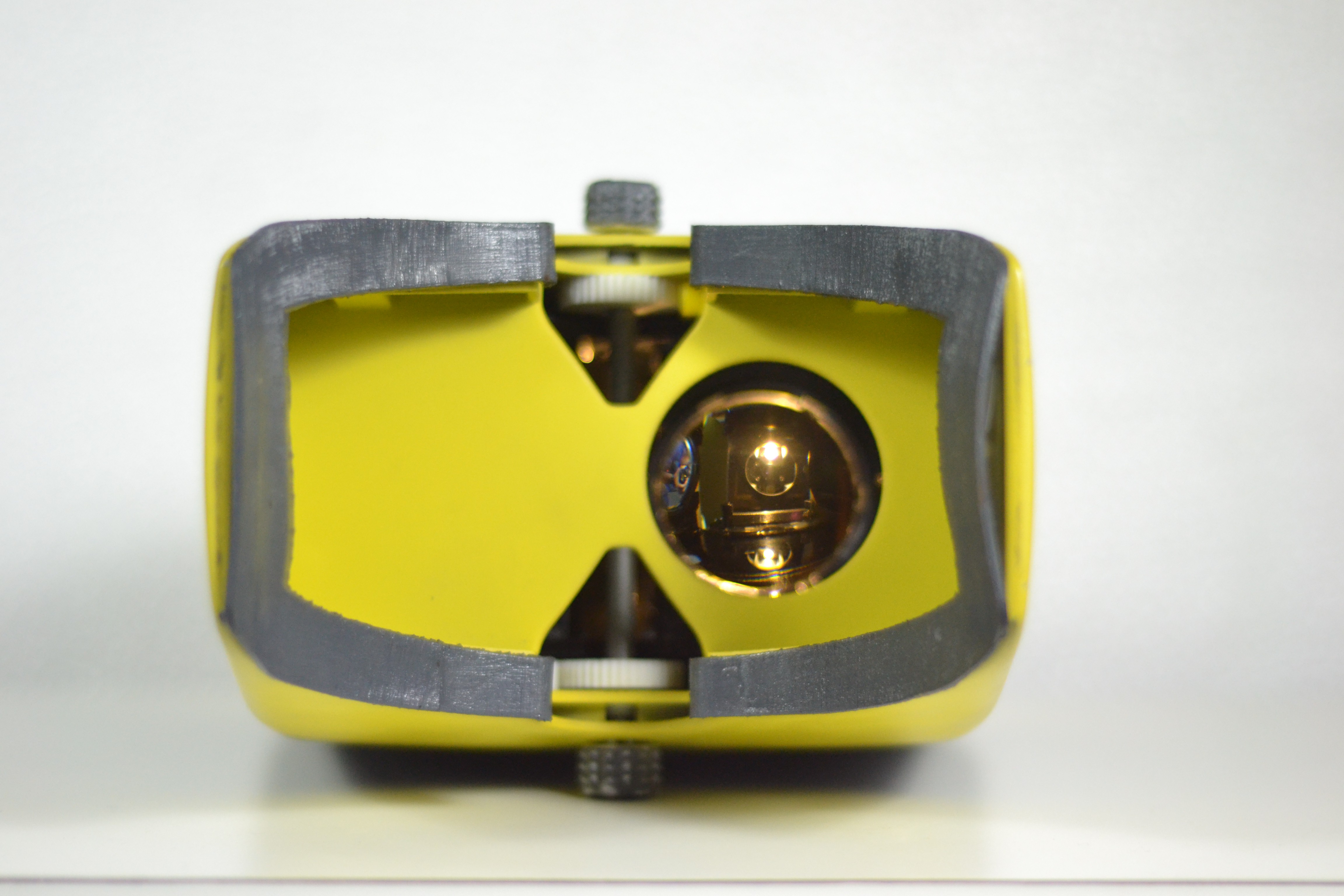
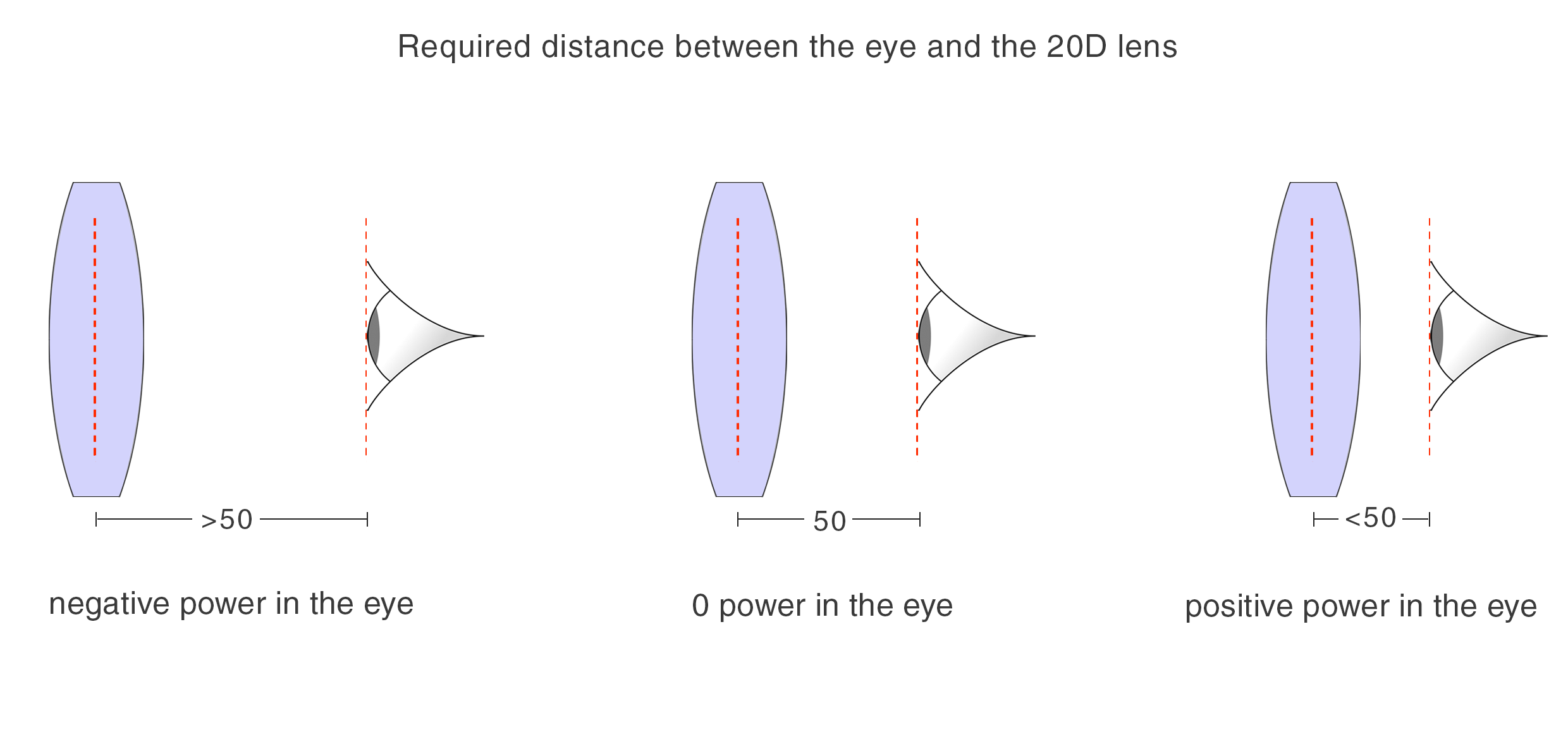
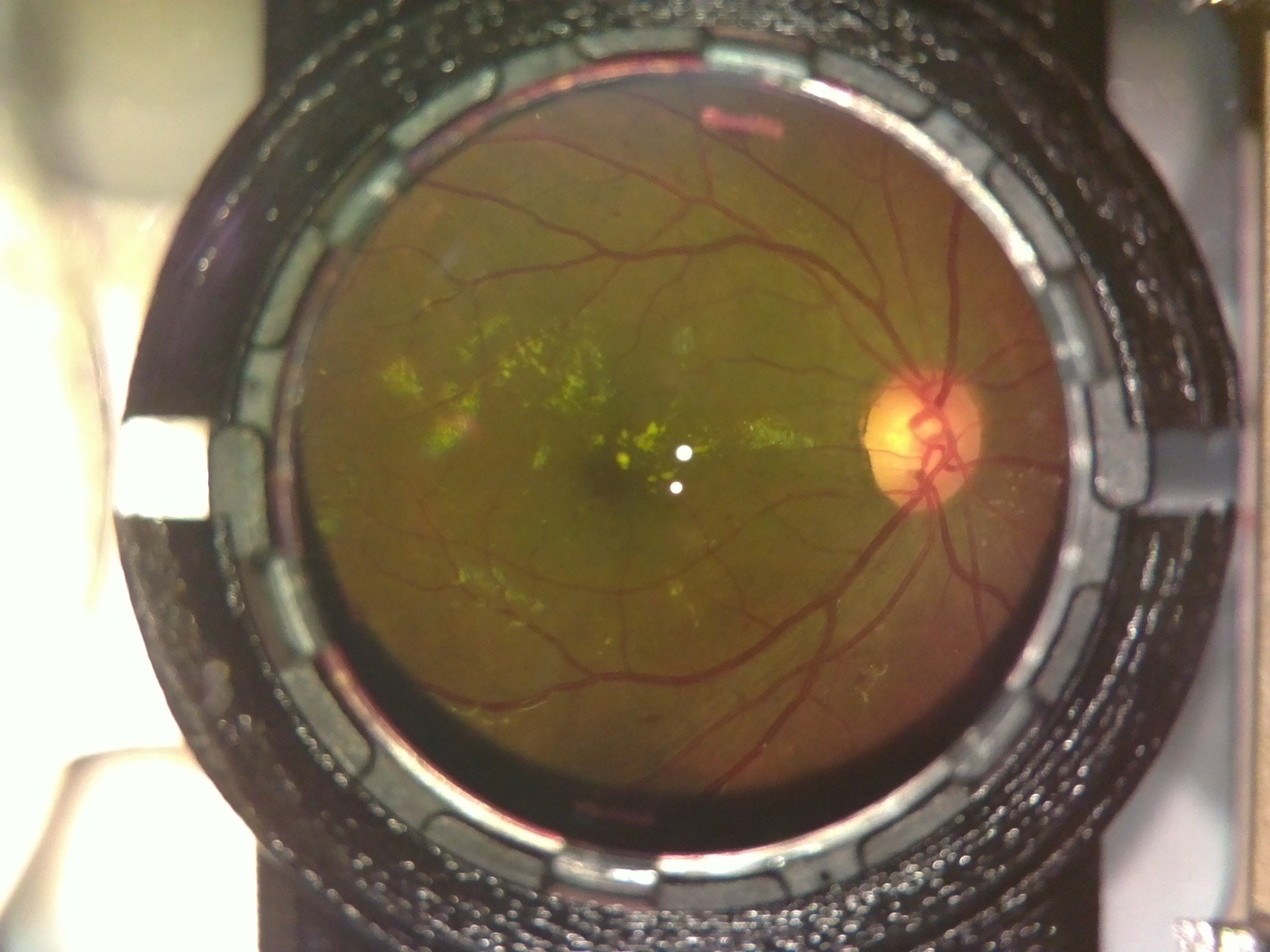
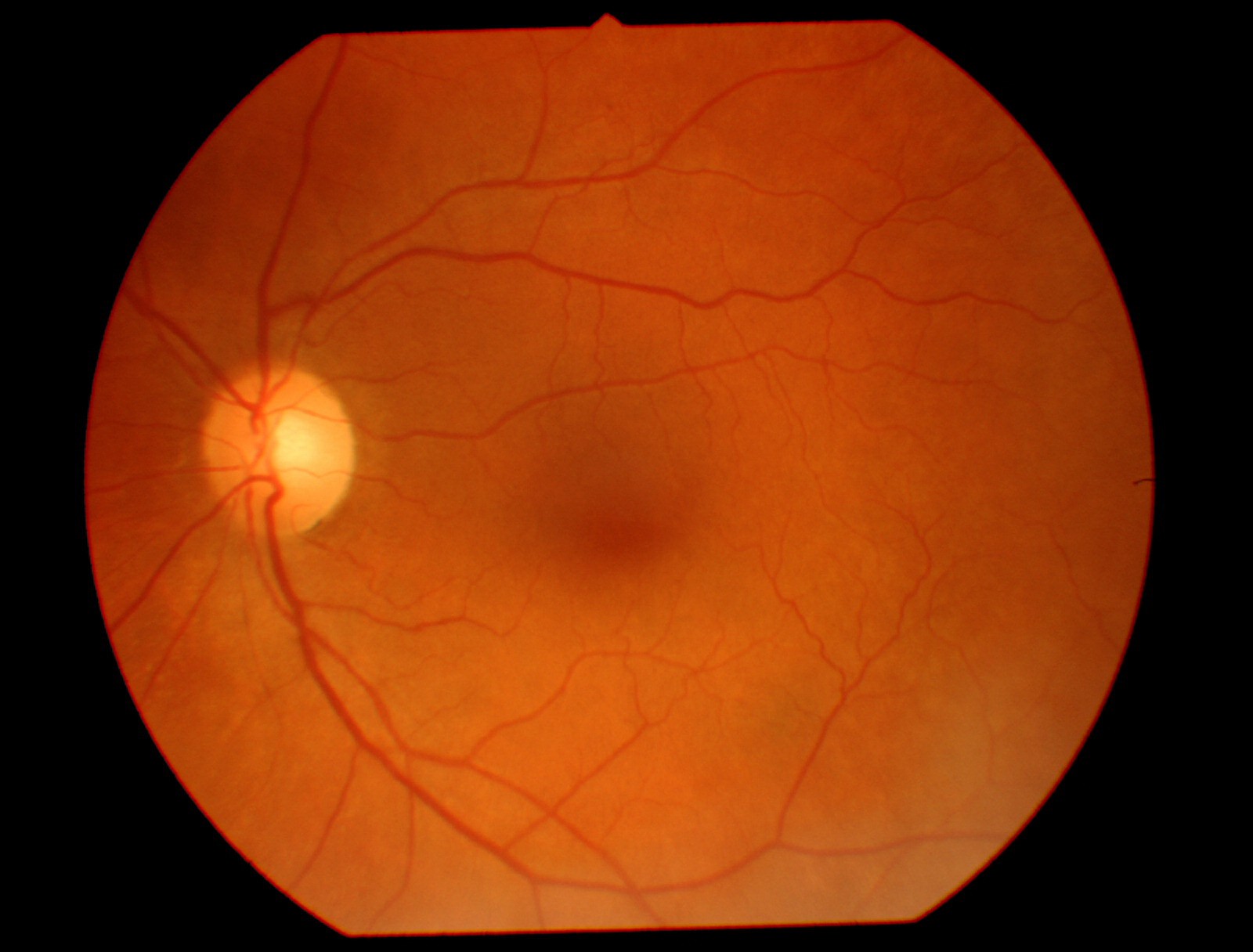
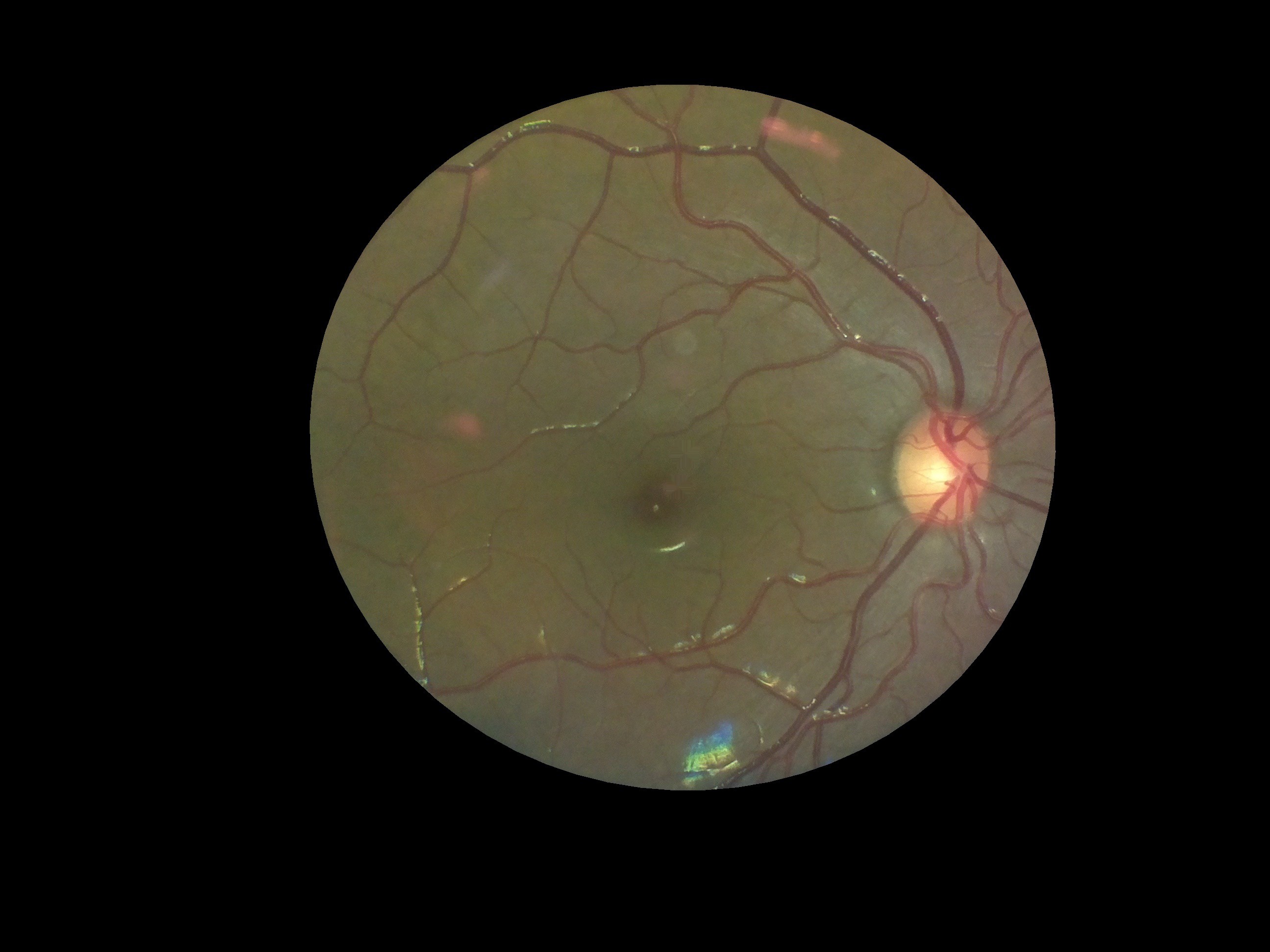
Ophthalmoscopy is a technique by which optometrist analyze and view the retina and its features by either directly looking or imaging, the retinal features through the pupil. OIO captures the images of the retina using the same technique, through a camera.
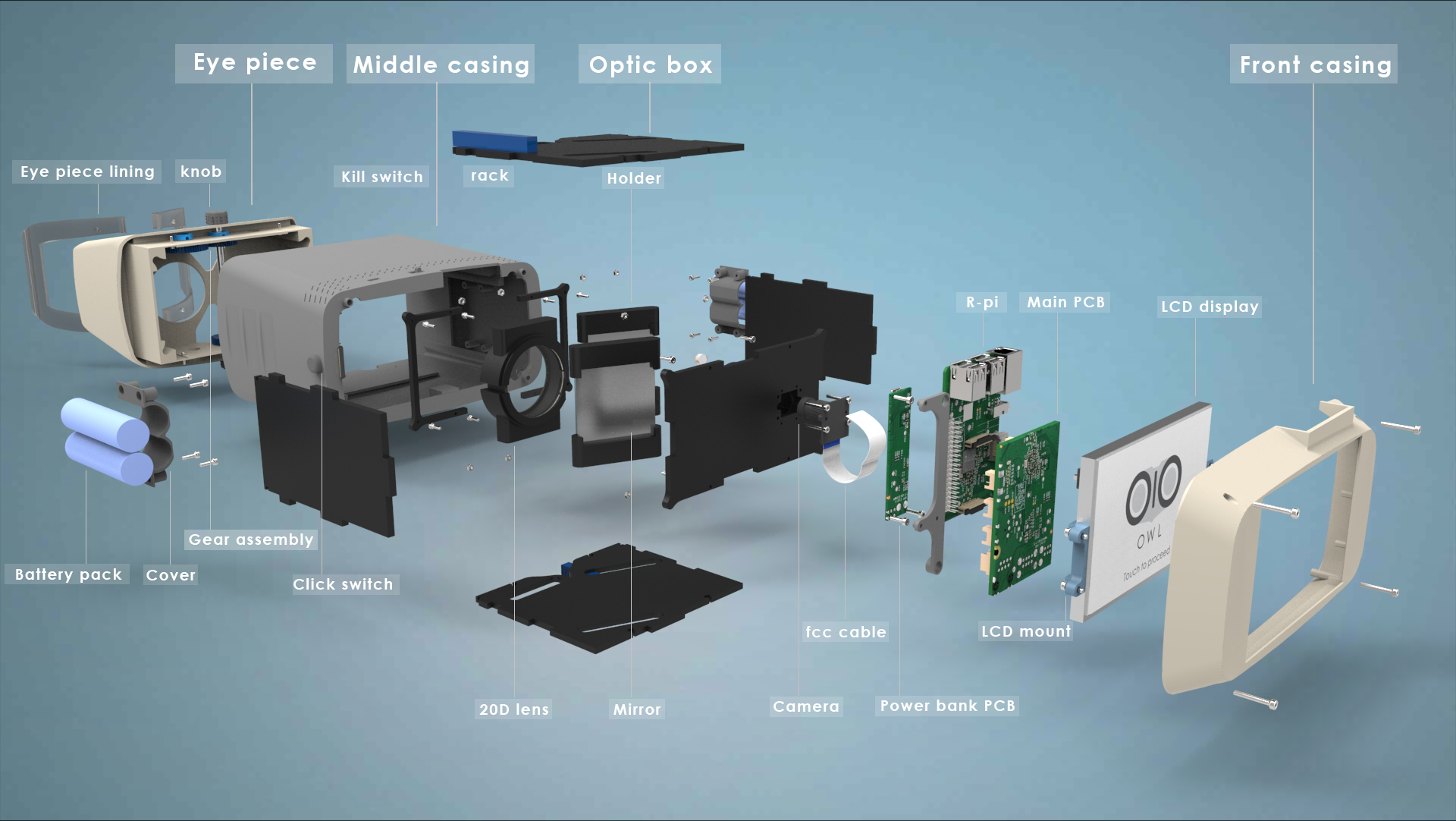
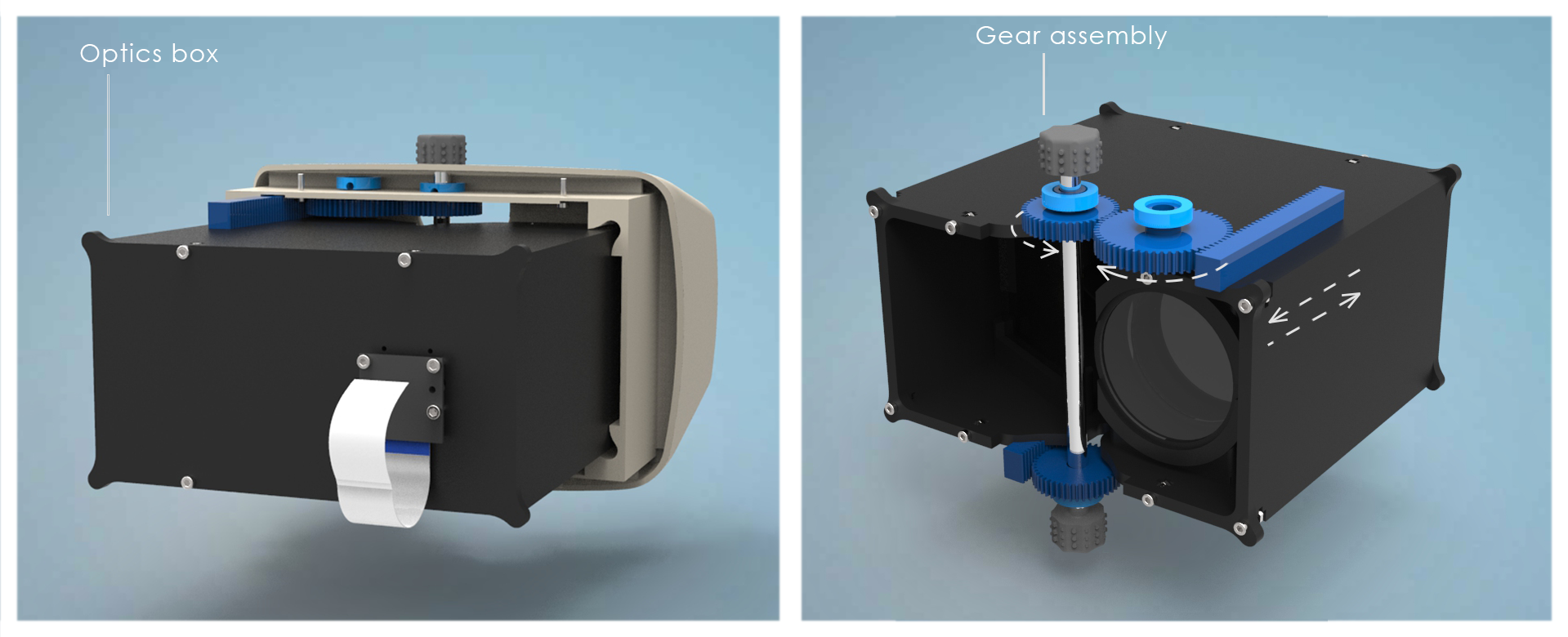
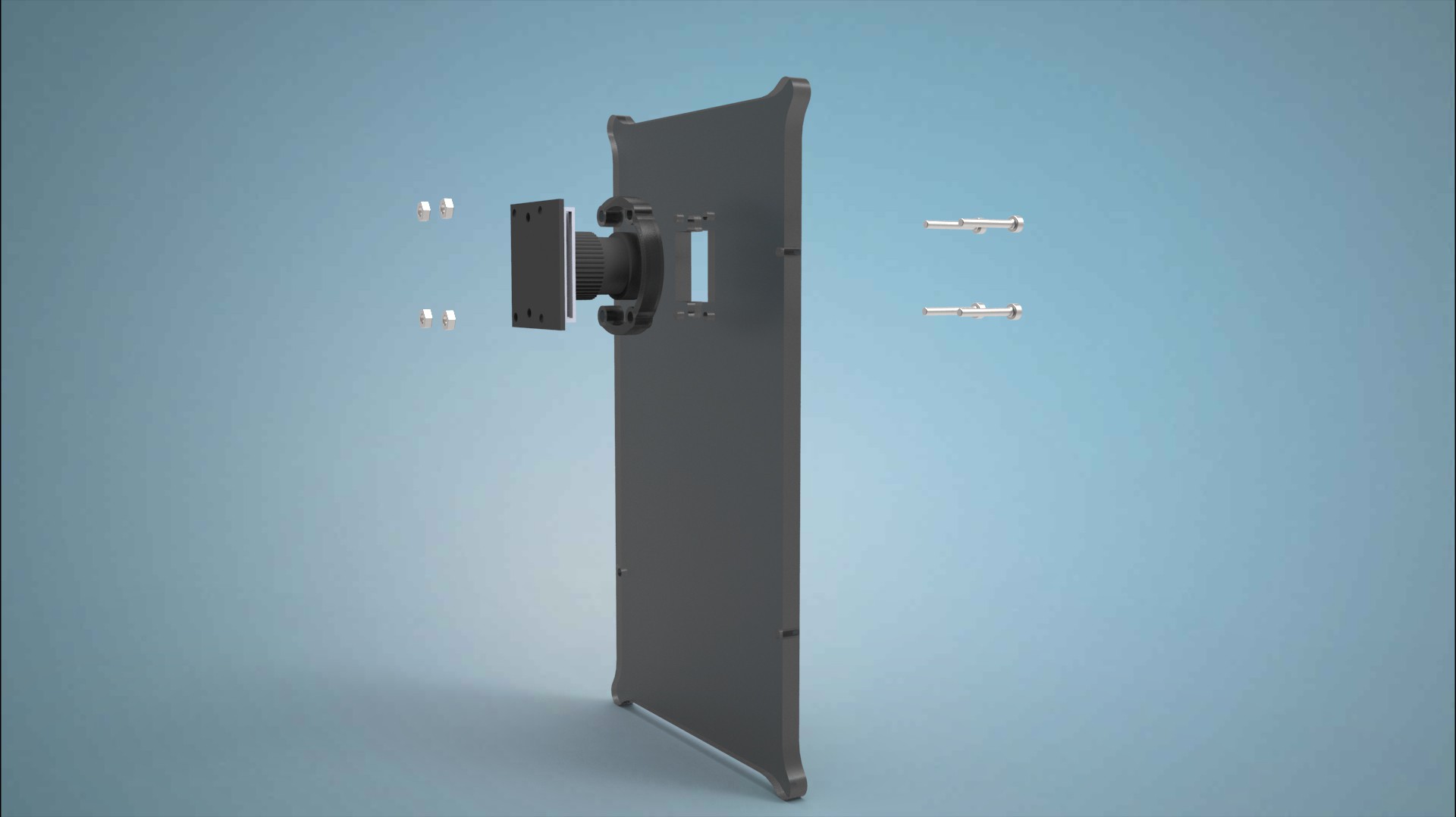
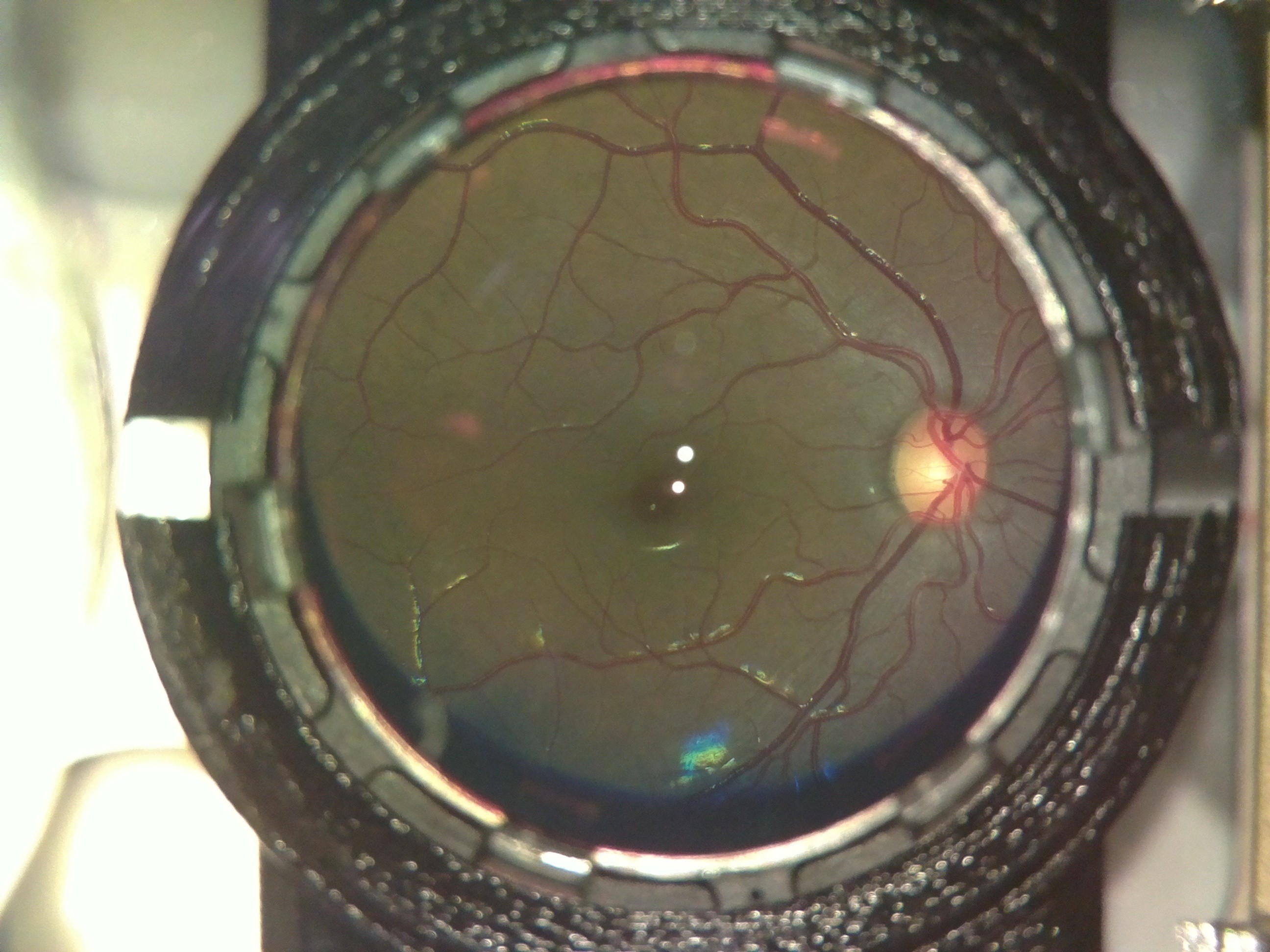
The OIO uses a 20D lens, mirrors, light source and camera, a raspberry pi and a touch interface to achieve this. The lens and mirror system are used to compress the optical path and focus the light from retina onto the camera. The camera and pi act as the processing unit and display live images on the display allowing the clinician to easily image the retina.
References:





















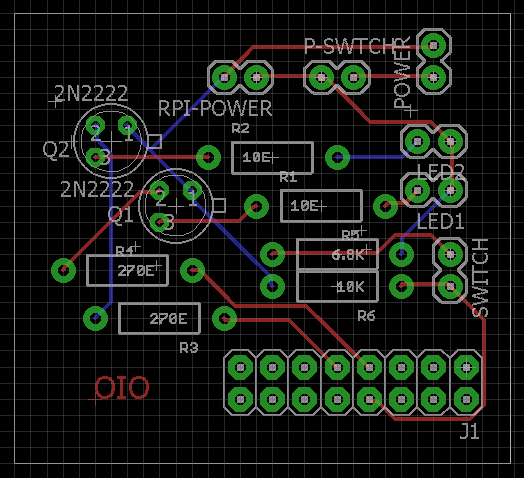











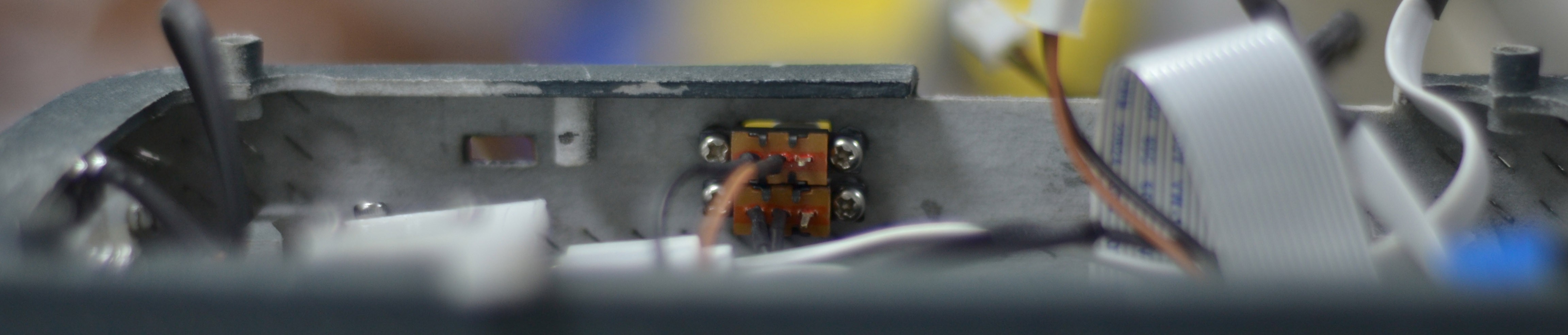
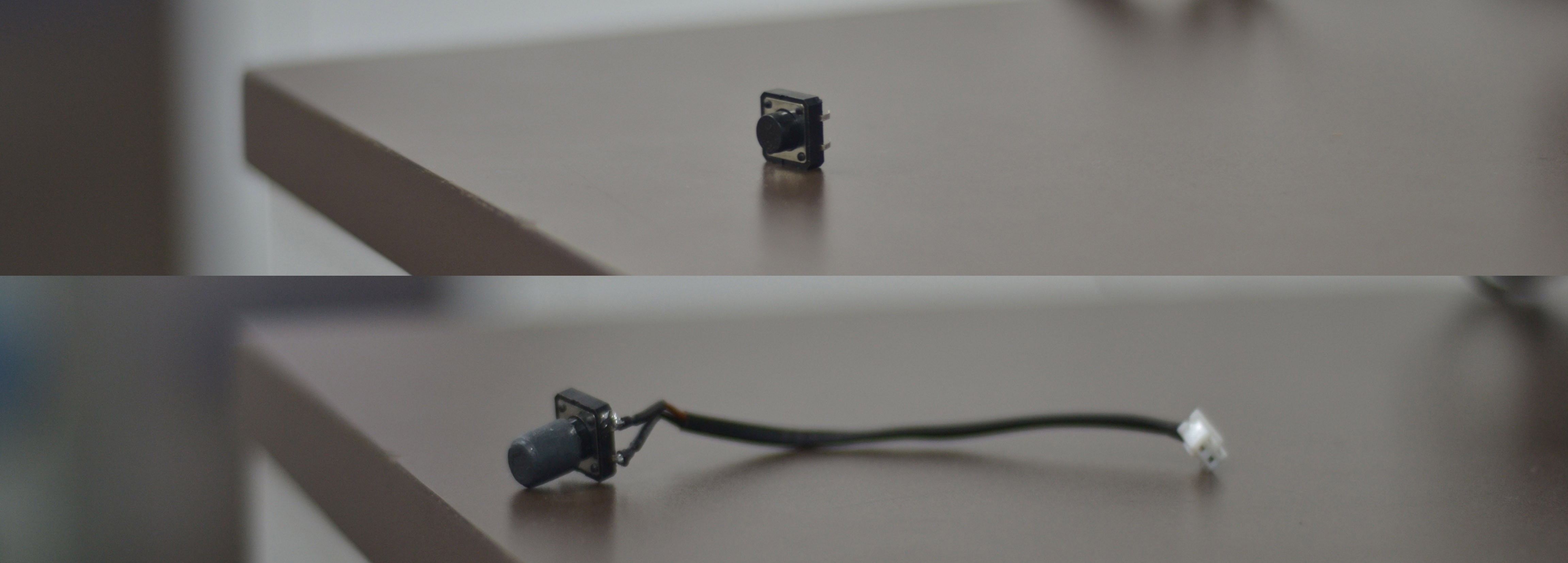 Click Switch
Click Switch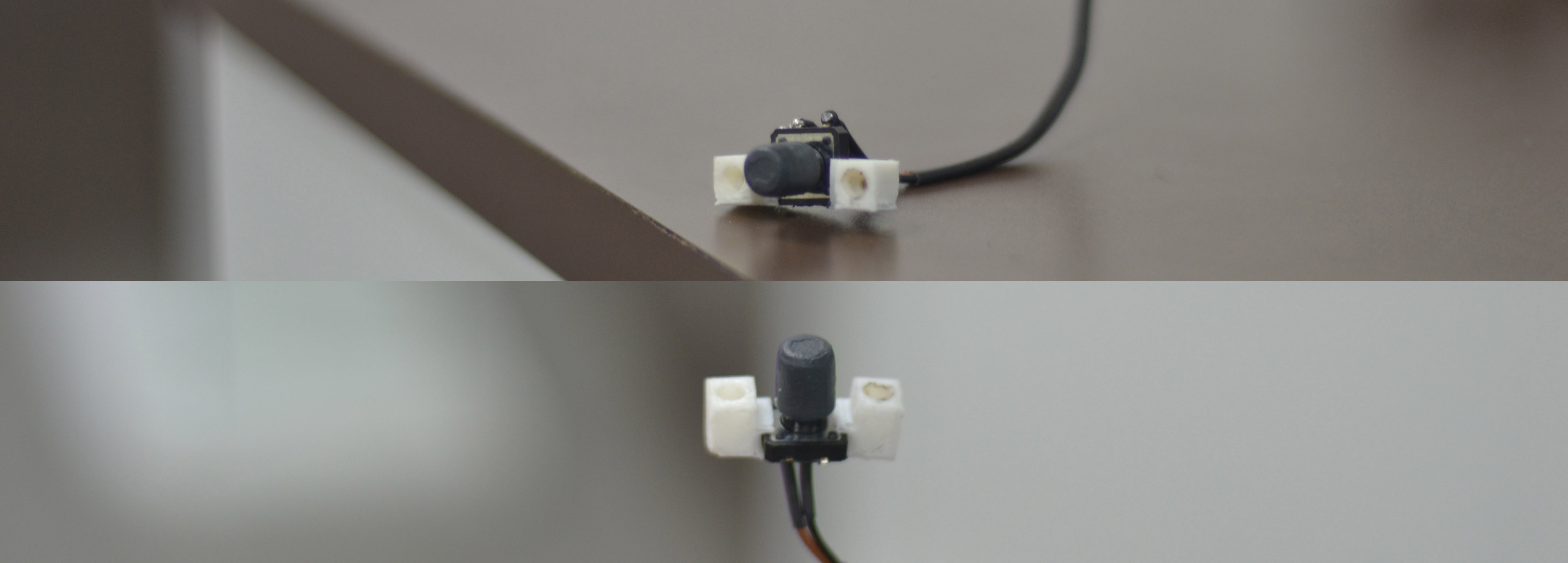
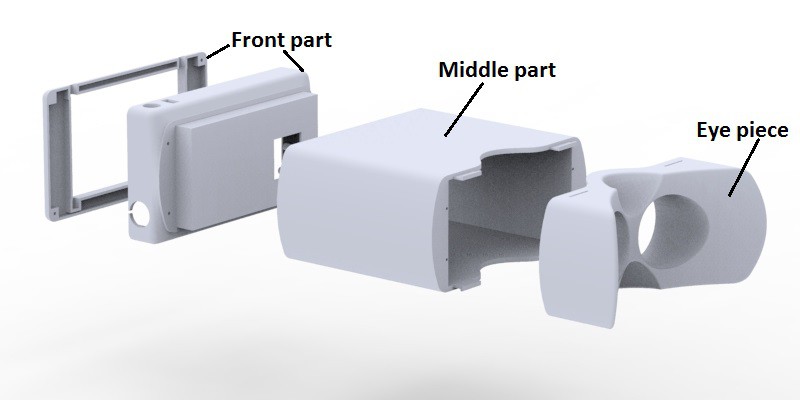
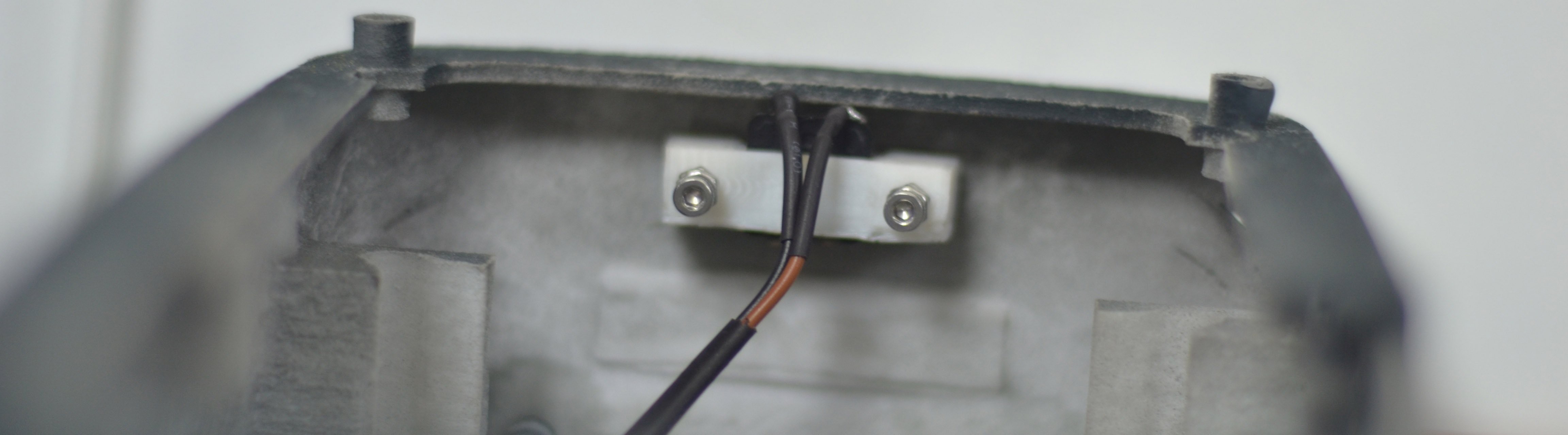 Click Switch Assembled inside the middle casing
Click Switch Assembled inside the middle casing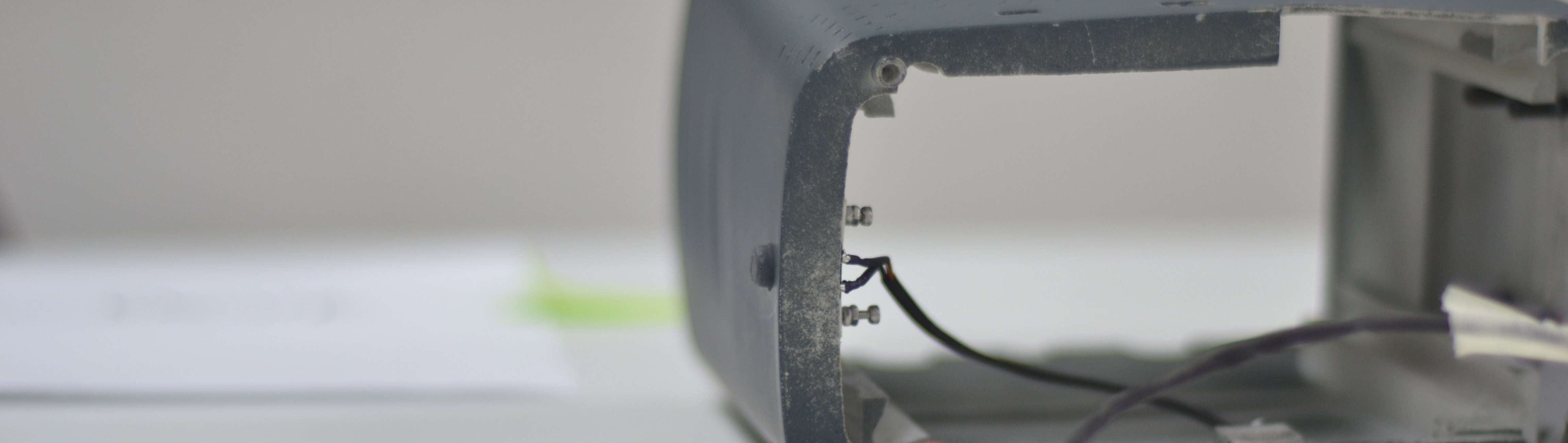





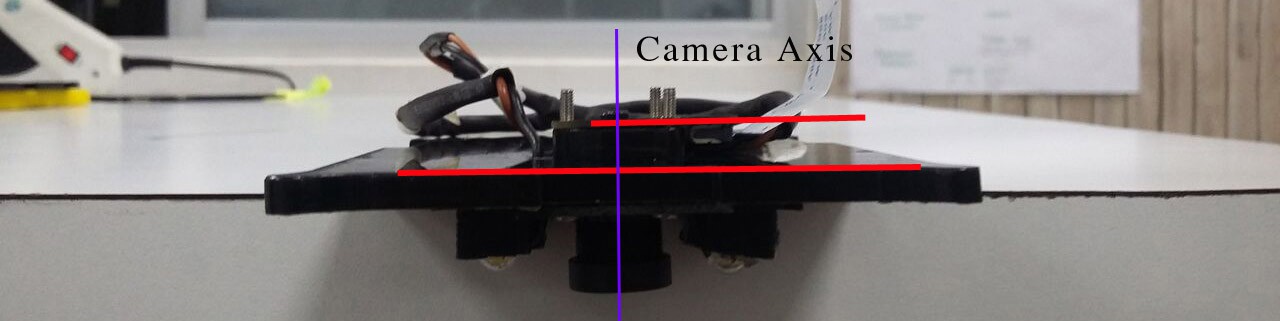


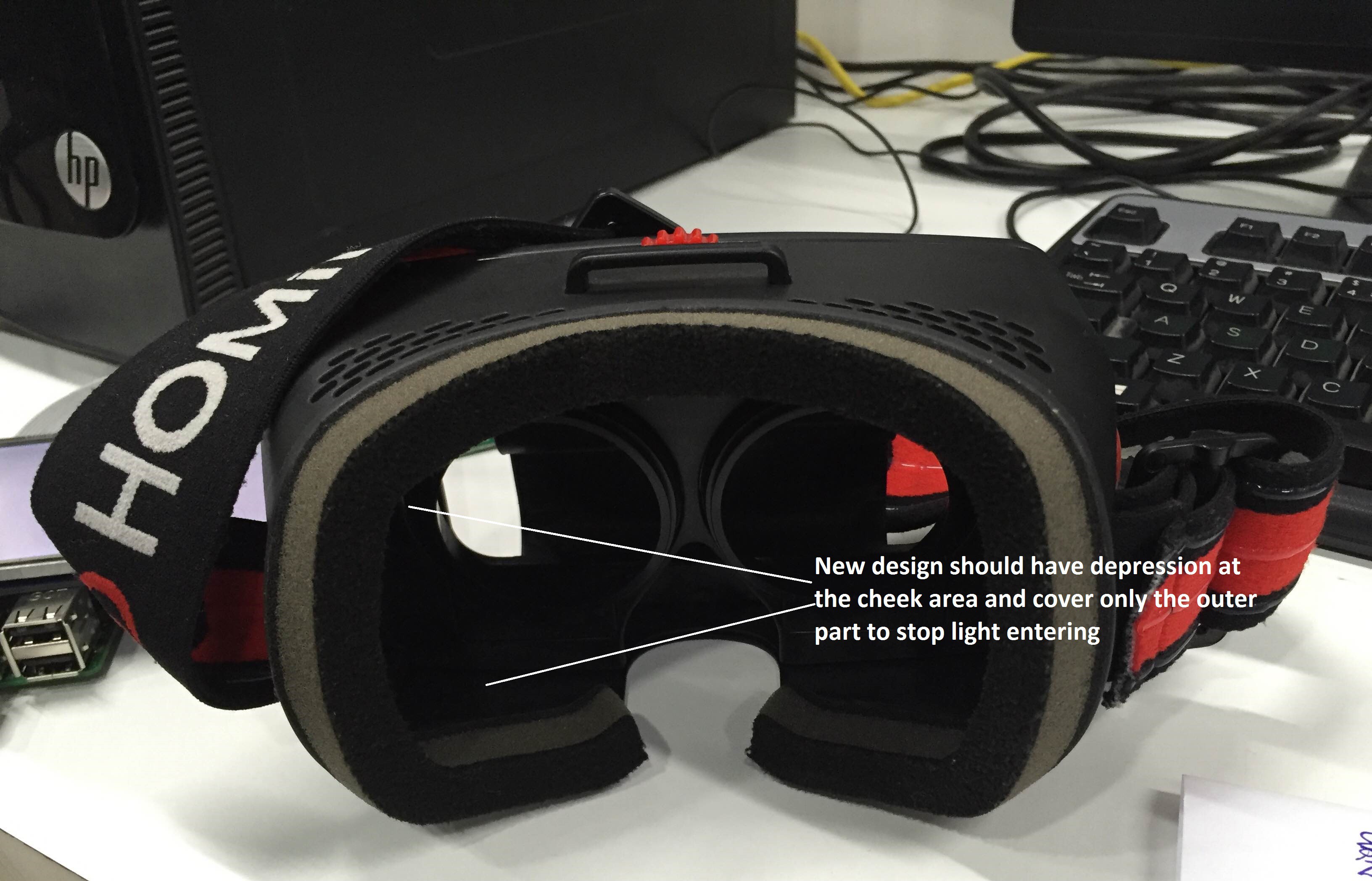

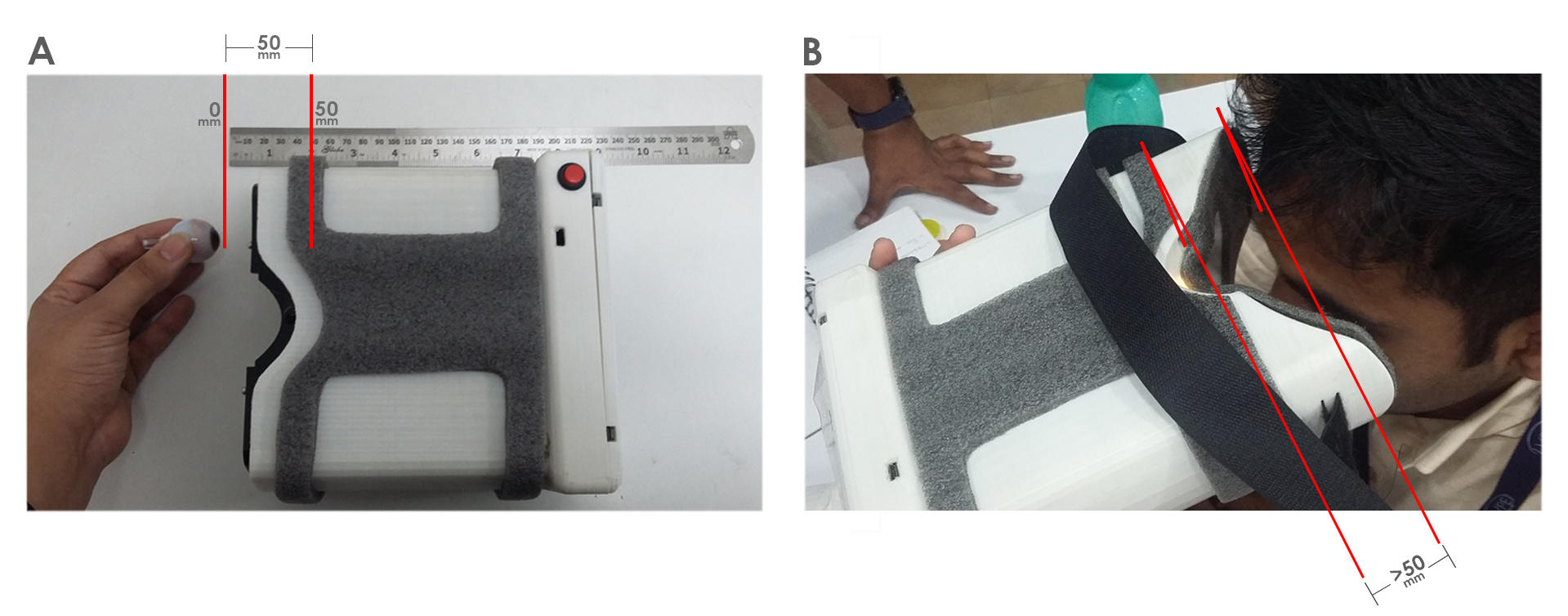
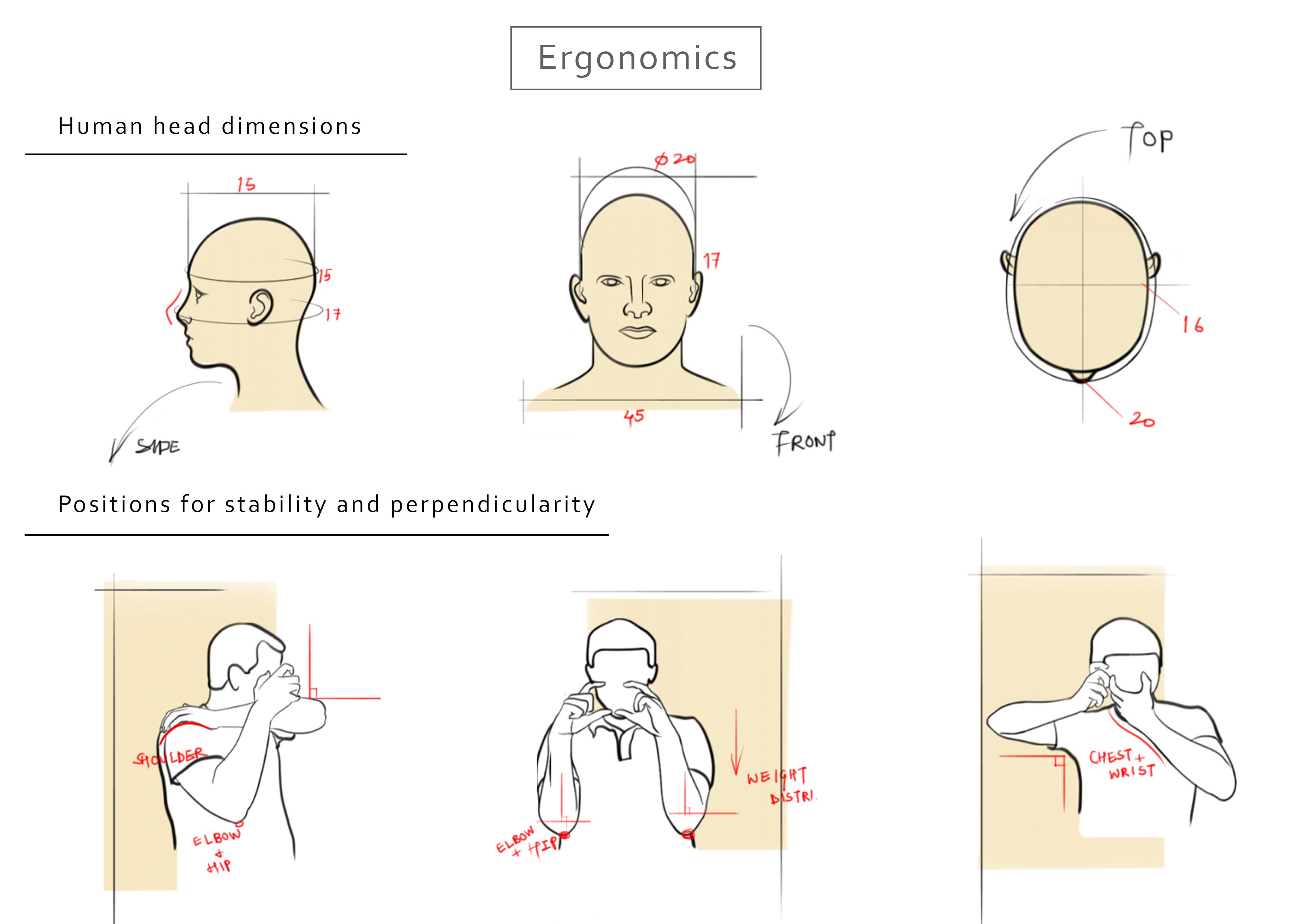
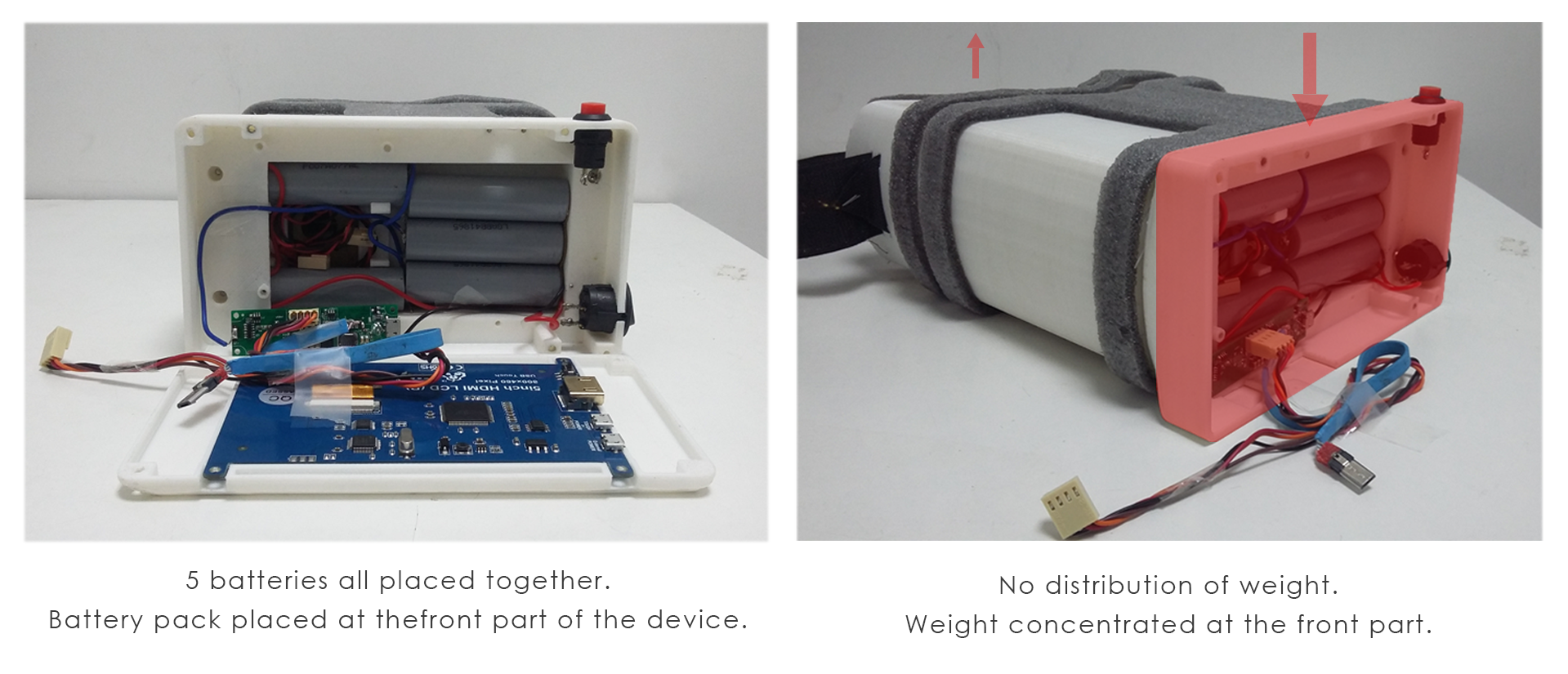
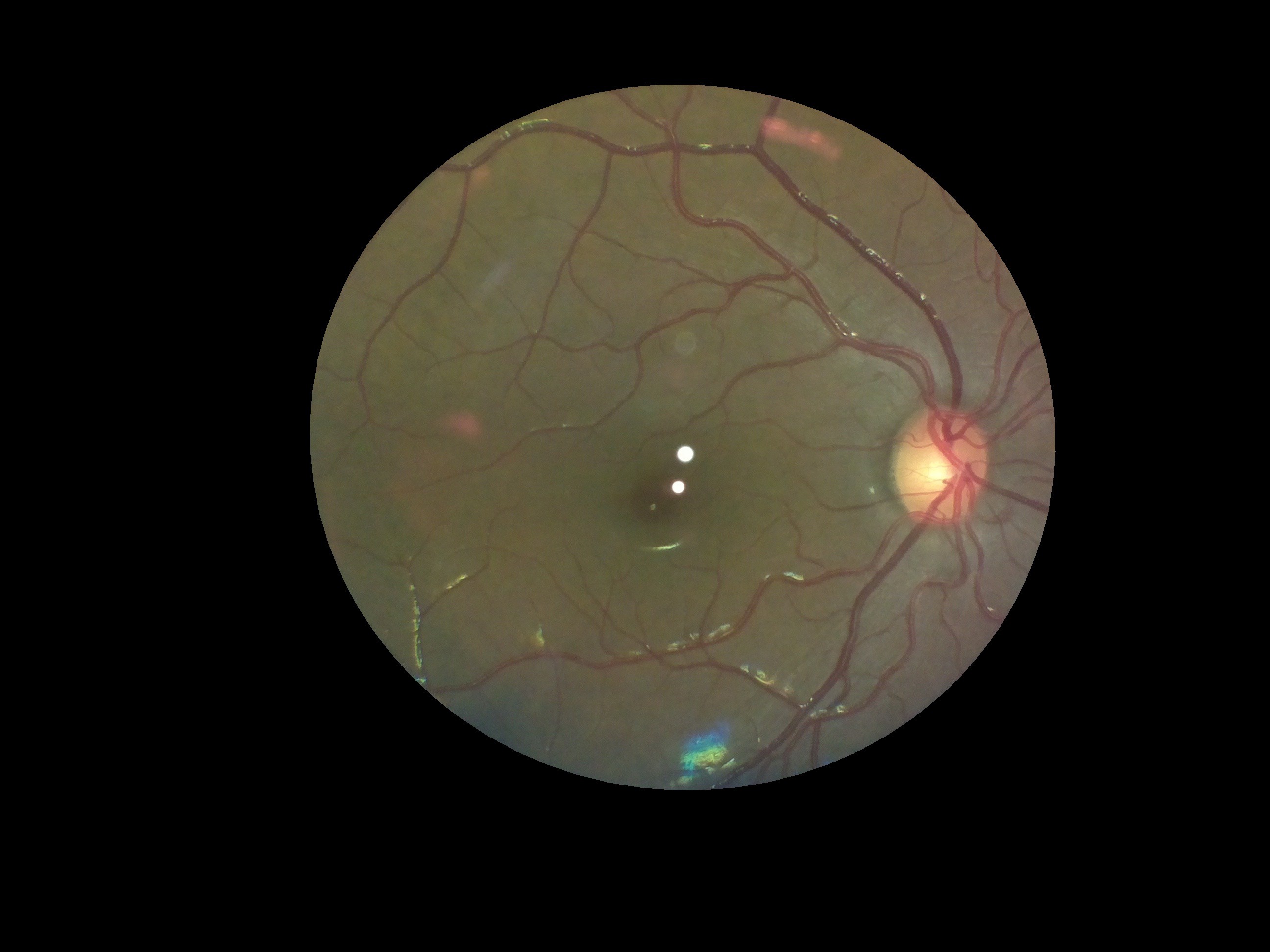
 If not parallel we get distorted images of the retina as the camera and light won't focus the retina properly. By keeping the device orthogonal to the examinee we can ensure the planes of 20D lens and lens of the eye are parallel to each other.
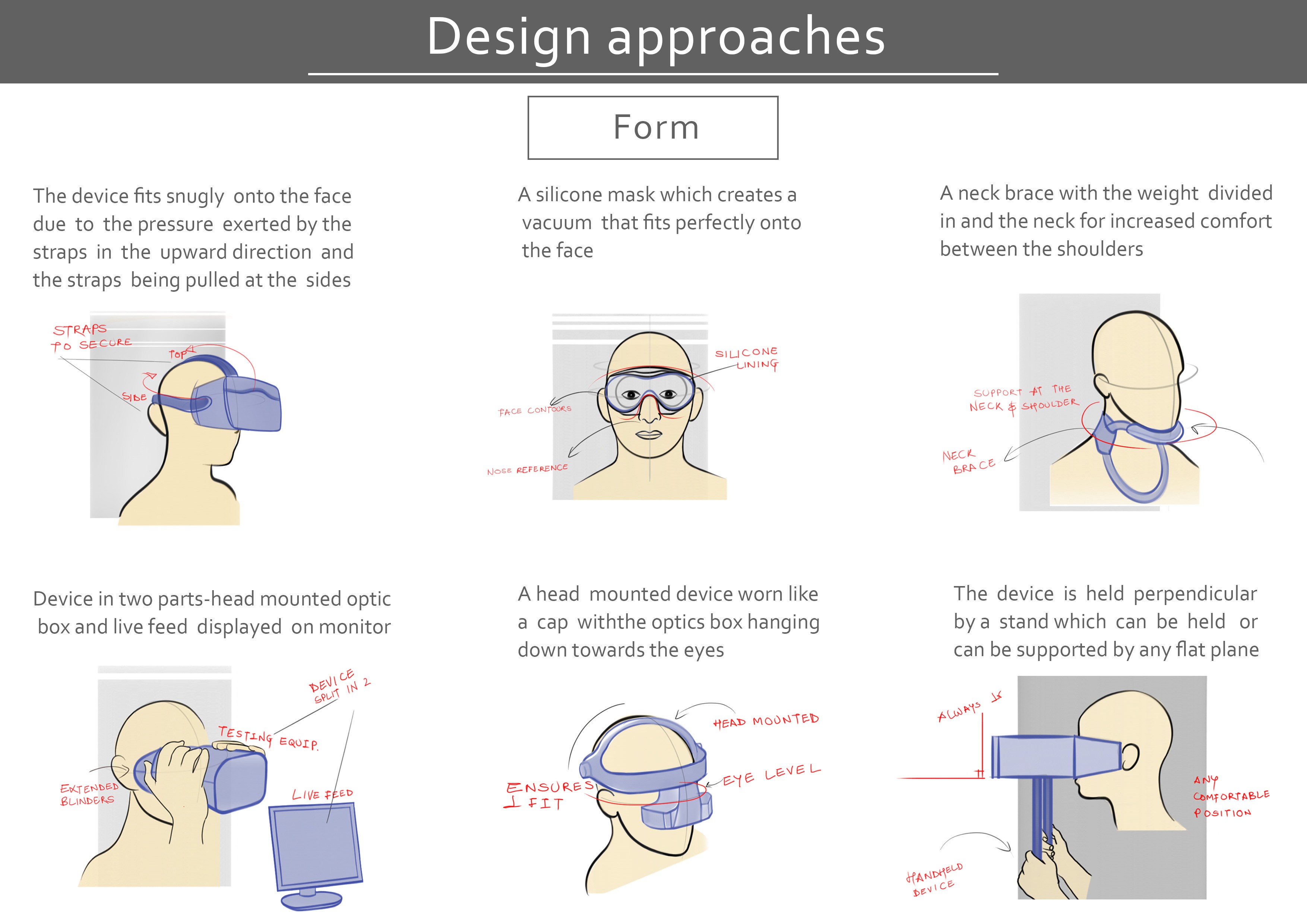
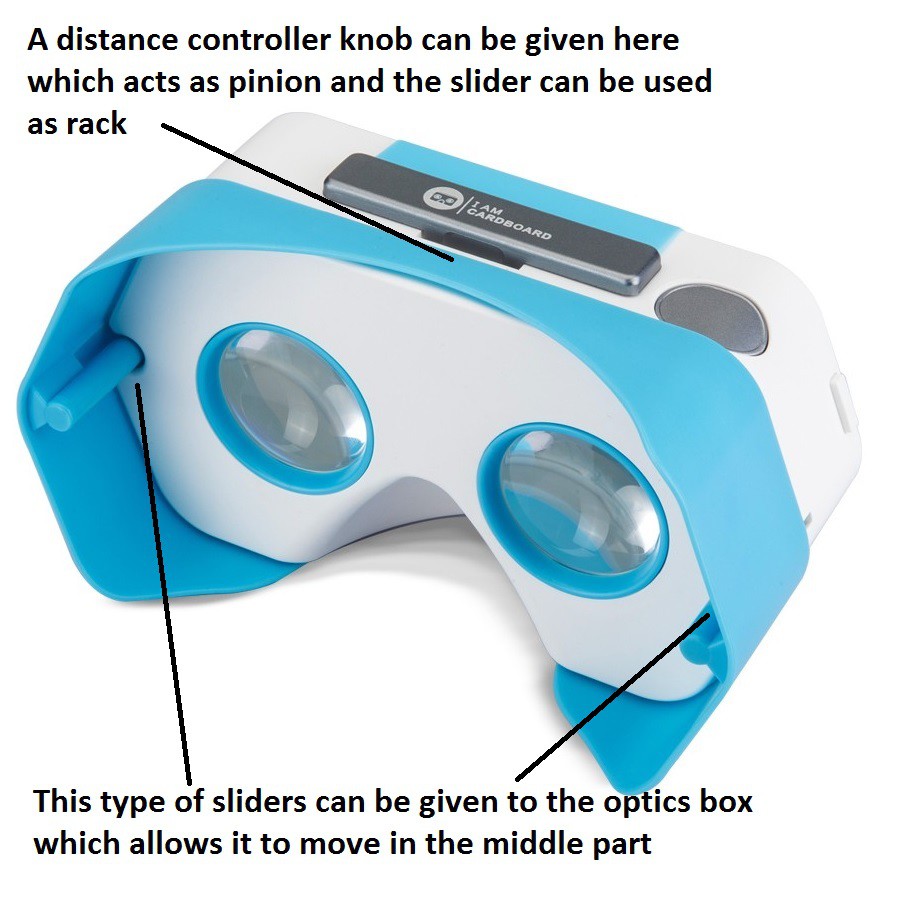
If not parallel we get distorted images of the retina as the camera and light won't focus the retina properly. By keeping the device orthogonal to the examinee we can ensure the planes of 20D lens and lens of the eye are parallel to each other. It can be done by two methods one by adding a headband as normally used in VR headgears. Other option would be arranging components in such a way it redistributes the whole weight and achieve orthogonality as keeping an head band with the device needs sterilization every time after use and feels little invasive for the patient.
It can be done by two methods one by adding a headband as normally used in VR headgears. Other option would be arranging components in such a way it redistributes the whole weight and achieve orthogonality as keeping an head band with the device needs sterilization every time after use and feels little invasive for the patient.












 Mihir Garimella
Mihir Garimella
 rdmyldrmr
rdmyldrmr
 Myrijam
Myrijam
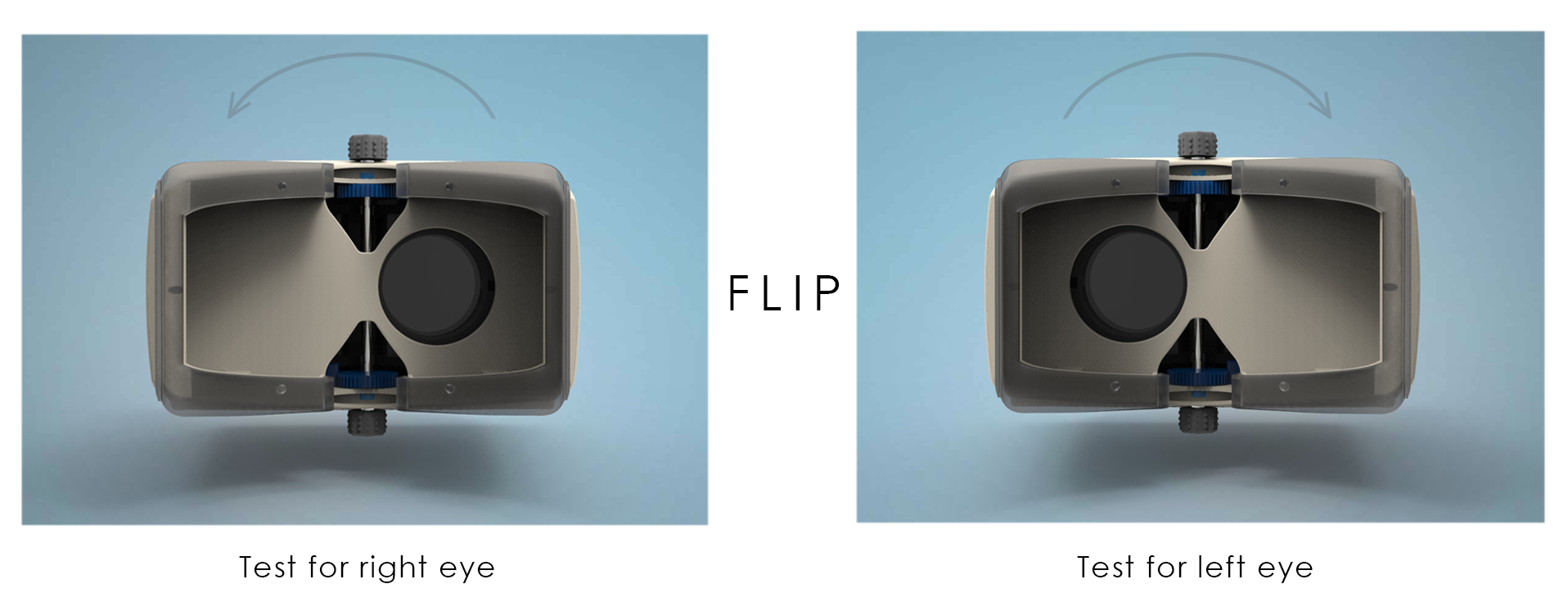
What if the refractive error of the eye includes astigmatism?