 Charles Fried
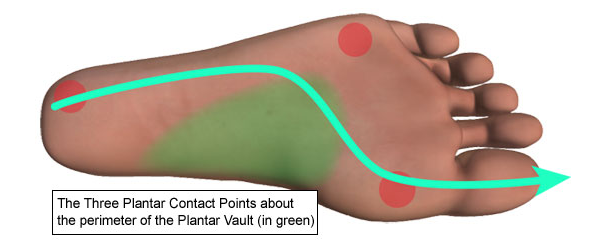
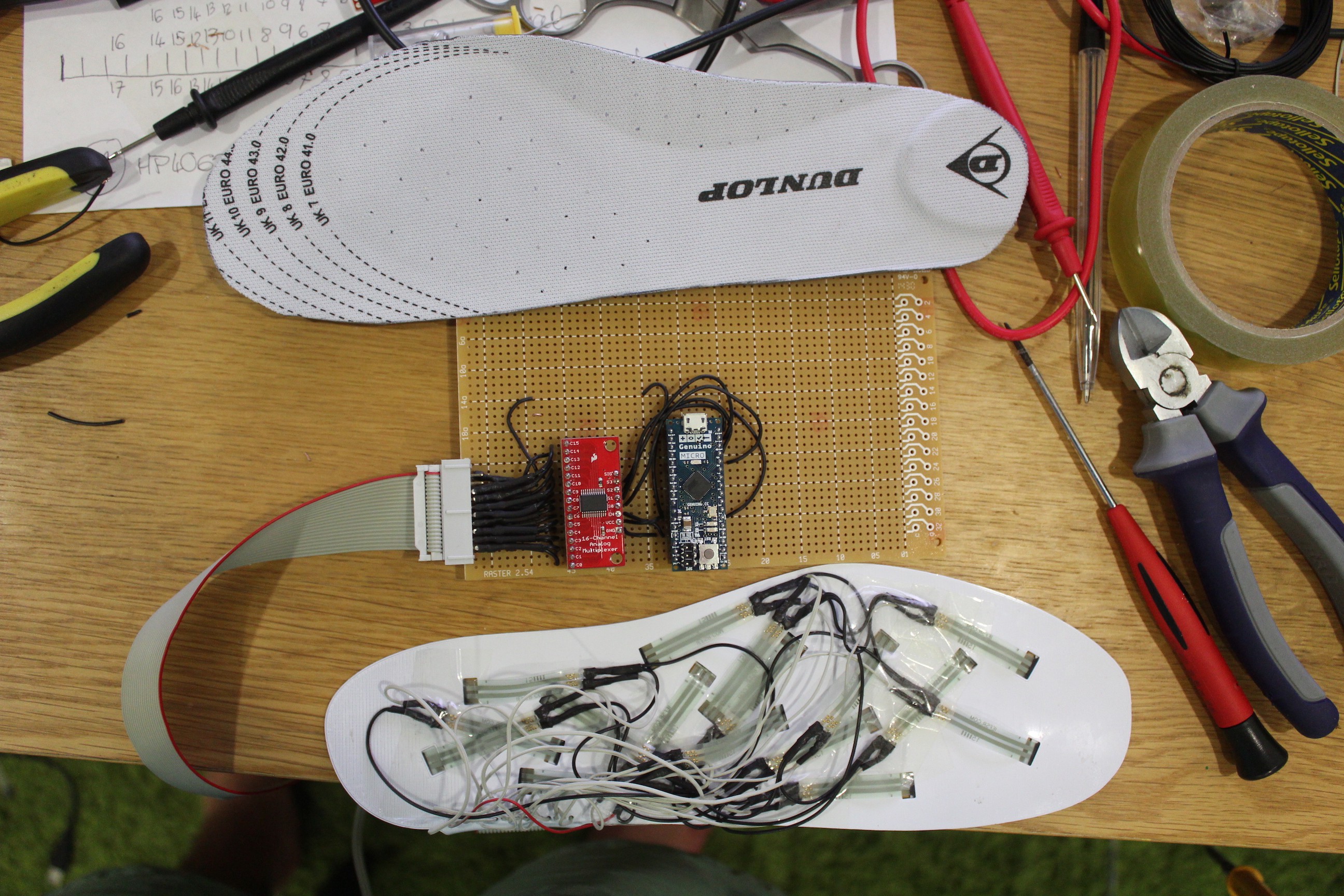
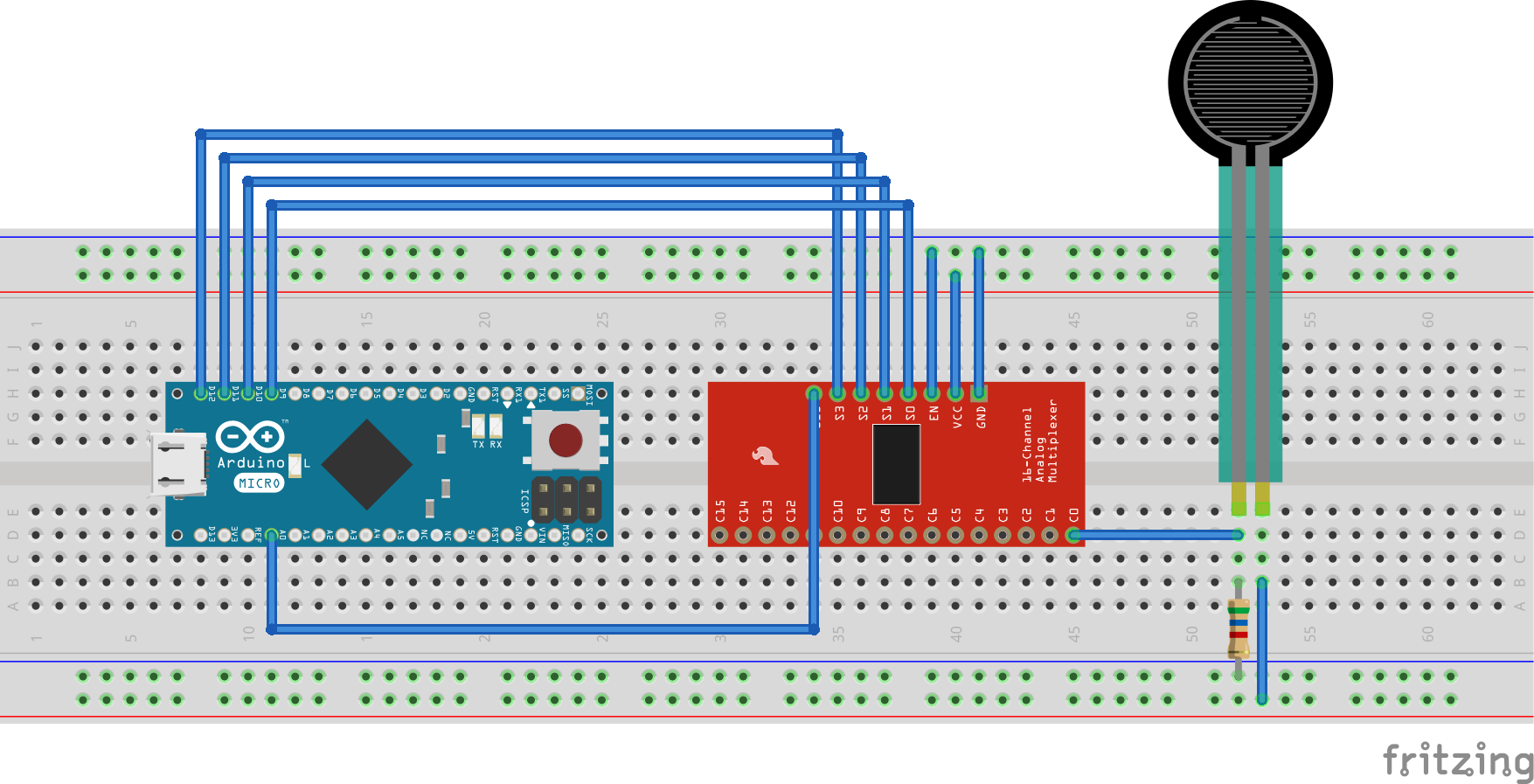
Charles FriedA NOTE ON SAMPLE RATE: My initial goal was to transfer the data from the insole via Bluetooth directly to the computer, however I've decided to first get it working as it should via a 20 way ribbon cable. This is because the sample rate in this project is crucial (<40ms), any loss of data via Bluetooth will reduce the quality. To understand why this is the case, it is important to know what a Gait Line is; the pressure distribution through time. I suggest you take a look at the PDF called CharlesFried which shows the heatmap through time and gait line of my feet. This was carried out on a top of the range RScan platform at my local Orthotist.
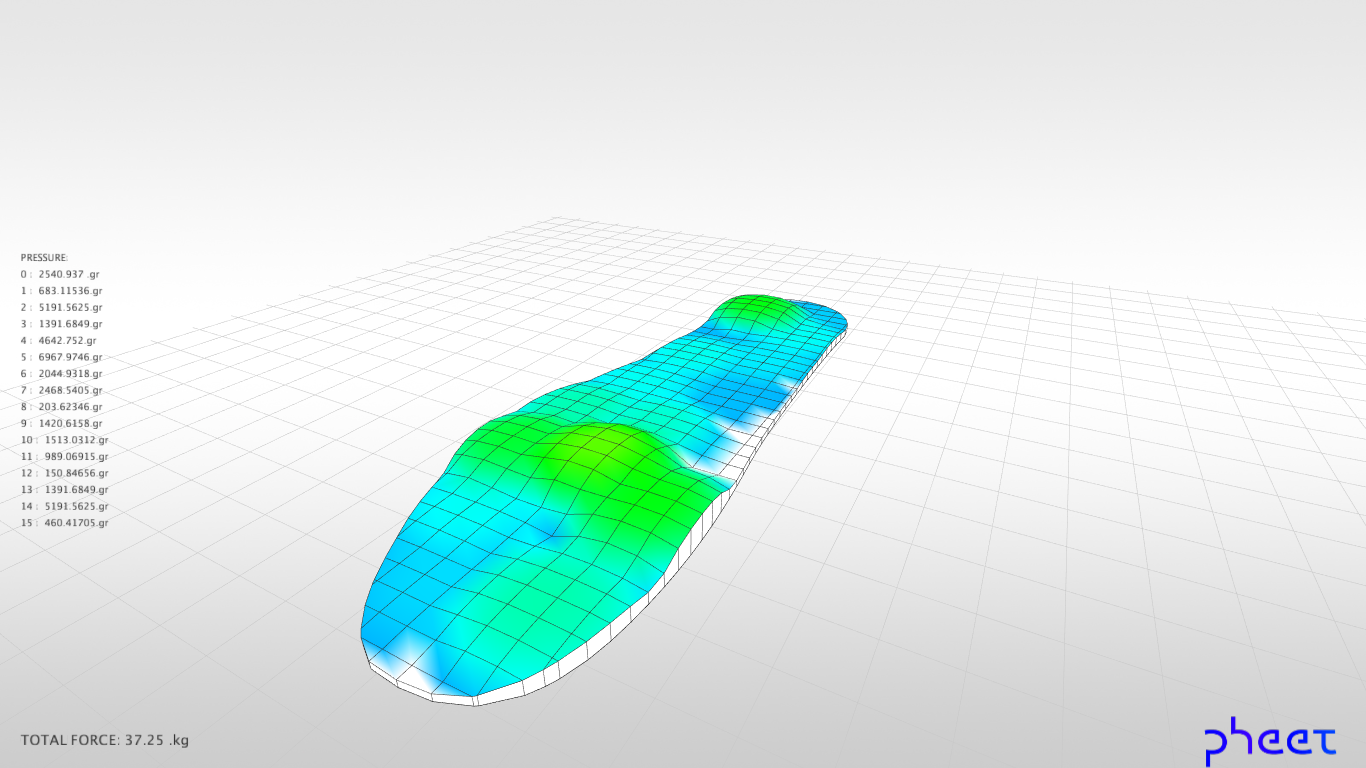
Now you might ask, well what is the point of the insole if you have the data from the RScan? This is at the very core of the project; first and foremost pressure peaks are much higher during periods of activity. Additionally, there is a tendency for people to subconsciously change the way they walk whilst under the observation of a Orthotist thus giving false data.





 mrobinson801
mrobinson801
 J. Ian Lindsay
J. Ian Lindsay
 johnowhitaker
johnowhitaker
 Dieu My Nguyen
Dieu My Nguyen
What a great idea to introduce this type of insole pressure system for mass shoes you can also visit how to fix underpronation to learn more about it.