 James Newton
James NewtonSystem Overview:
This is designed to work with a quadrature encoder and a motor driver of some kind. (e.g. DC, ESC, Stepper, etc...) It's the "Servo controller" part of this block diagram: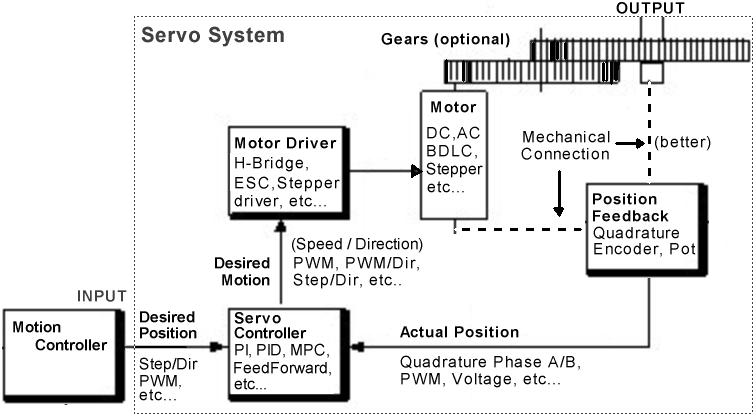
The "Motion Controller" could be a PC w/Mach3, LinuxCNC, etc... , or an Arduino w/ RAMPS/Marlin, GRBL, TinyG... basically anything that produces Step and Direction signals.
The "Motor Driver" could be a DC motor driver like this Low cost, 1 HP H-Bridge, or a SyRen 2 HP monster or an RC ESC, or Stepper driver... basically anything that accepts PWM pulses and Direction. Obviously, that will be whatever your motor needs as a driver.
The "Position Feedback" in this case needs to be a standard Quadrature Encoder like this Non-contact magnetic encoder, or any standard optical encoder.
Here it is working with a standard 3D printer board, replacing the little stepper drivers via an adapter cable.
Here is a sample session, getting the unit tuned and running:




 Paul Gould
Paul Gould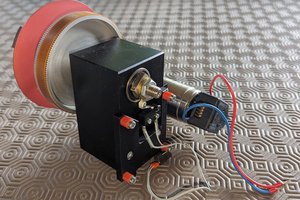
 JP Gleyzes
JP Gleyzes
 ottoragam
ottoragam
Tested with SyRen 25 Amp Driver:
http://amzn.to/2bjS4Xl
It should work the same with their 10 and 50 Amp versions.
SyRen 50 Amp Driver:
http://amzn.to/2bAD3AV
Their Sabertooth dual drivers don't appear to support PWM and direction as separate signals... they expect a single analog input which then drives forward above 2.5 volts and backwards below 2.5 volts. The BOB PID could probably be modified to support that if desired. Let me know.
For the single channel drivers, the mode switch needs to be set to "Option 3: Analog One-direction with forward/reverse select on S2" It's 1,2,3, on, 4,5, off, 6 on. Note that this mode is NOT listed in their "quick start" documentation, you have to look in the main manual.
The connections are:
- S1 to Z axis pin 3 "D", the PWM Drive
- S2 to Z axis pin 5 "S", the Direction signal
- 0V to Z axis pin 7 "-", Ground
You can connect 5V to the + line if you want the SyRen to supply logic power to the BOB PID. The En signal isn't used and the motor will /always/ be enabled. (watchout!)
Works a treat! Video soon.