0%
0%
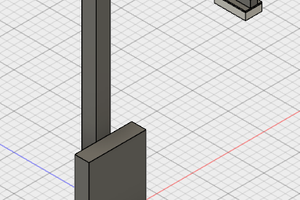
Precision Indoor Positioning
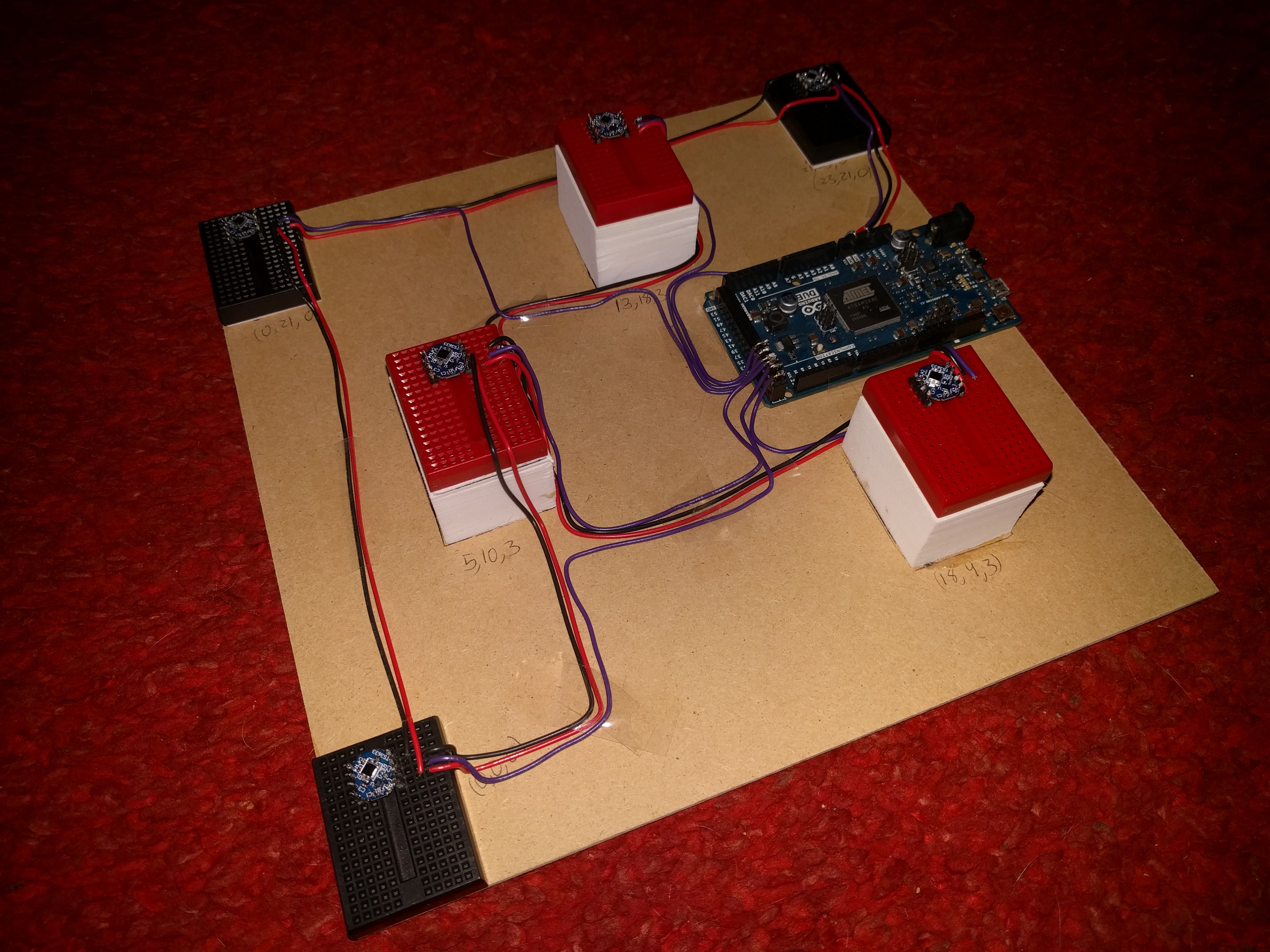
Performing high precision indoor positioning using Vive Lighthouses, Arduino Due, and TS3633-CM1
 Mike Turvey
Mike TurveyBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 jlbrian7
jlbrian7
 conradcn
conradcn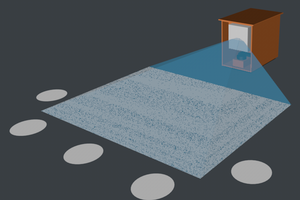
 Timescale
Timescale
 Luke Beno
Luke Beno
Hi, When I place 3 sensors in a flat position, I have a lot of noise. I think is something physically, reflections, light... How can I fix it?