 SHIVANI
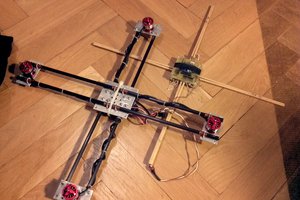
SHIVANIWhat I wanted to do was to build a prototype that can fly and walk on the ground as well so in short a combination of drone and rover. That is when I decided to make my project using PlutoX controller which controls a drone and it also has an add on breakout board which i used to add extra functionalities like rover mode.
Due to small wheels it becomes difficult to keep the heading of the in straight direction for this I have used something called as AutoStabilization. AutoStabilization uses the drones magnetometer data and keeps the heading straight. Heading can only be changed using the phone(Controller).
To open drone experimentation to the world, Drona Aviation are crowdfunding for PlutoX on Indiegogo. Support us and help us bring it to life: https://igg.me/at/flyplutox/tinkerers
 kevarek
kevarek
 kwikius
kwikius
 Joe De Filippis
Joe De Filippis
 ThunderSqueak
ThunderSqueak