 MrDreamBot
MrDreamBotThis is an ambitious project in 3 phases:
- Phase 1 - Create an Arduino library to control the MAX – this involves reverse engineering the Meccano protocol to communicate with the MAX smart components eg, locomotion, servos, facial expressions, etc.
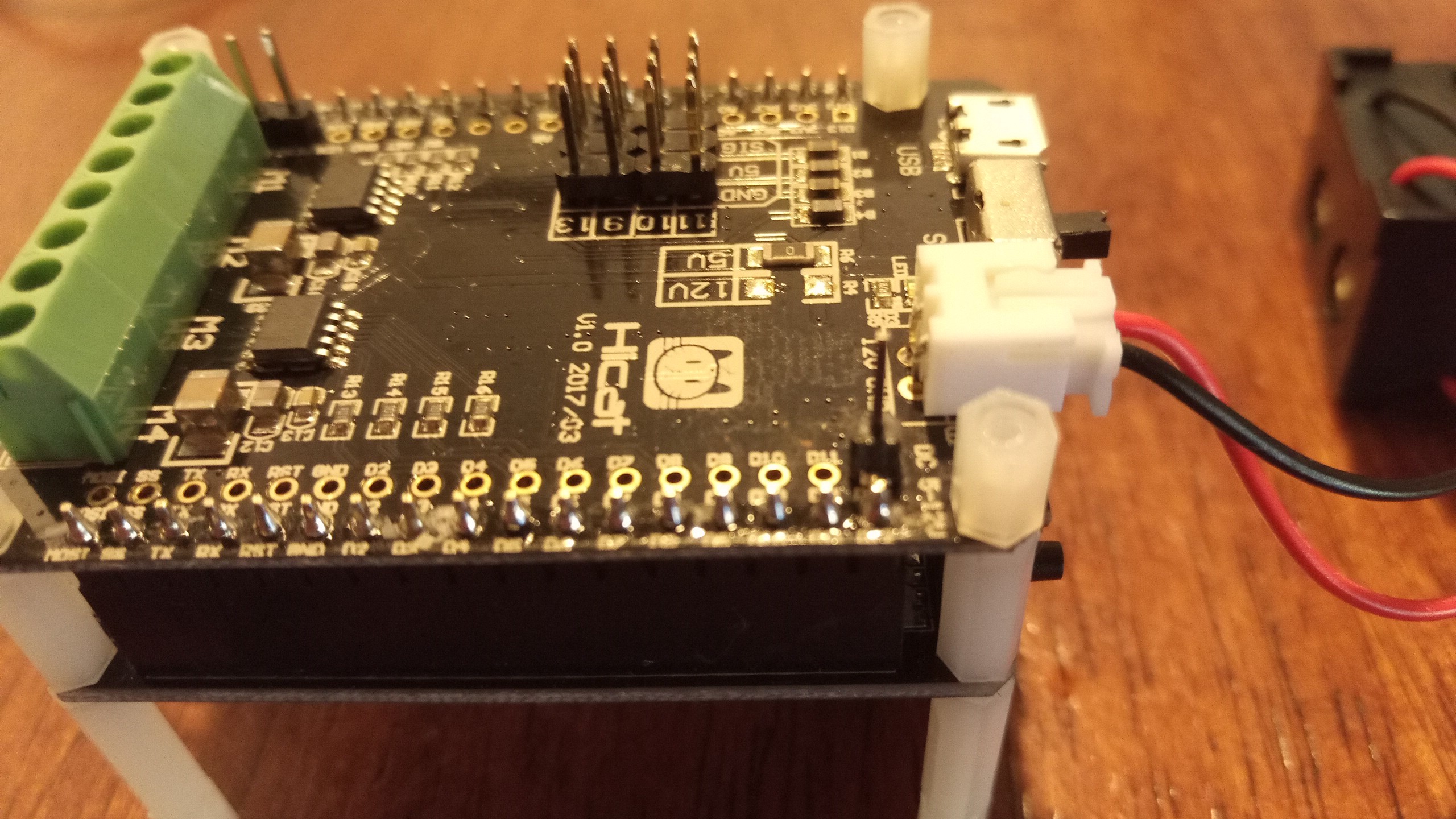
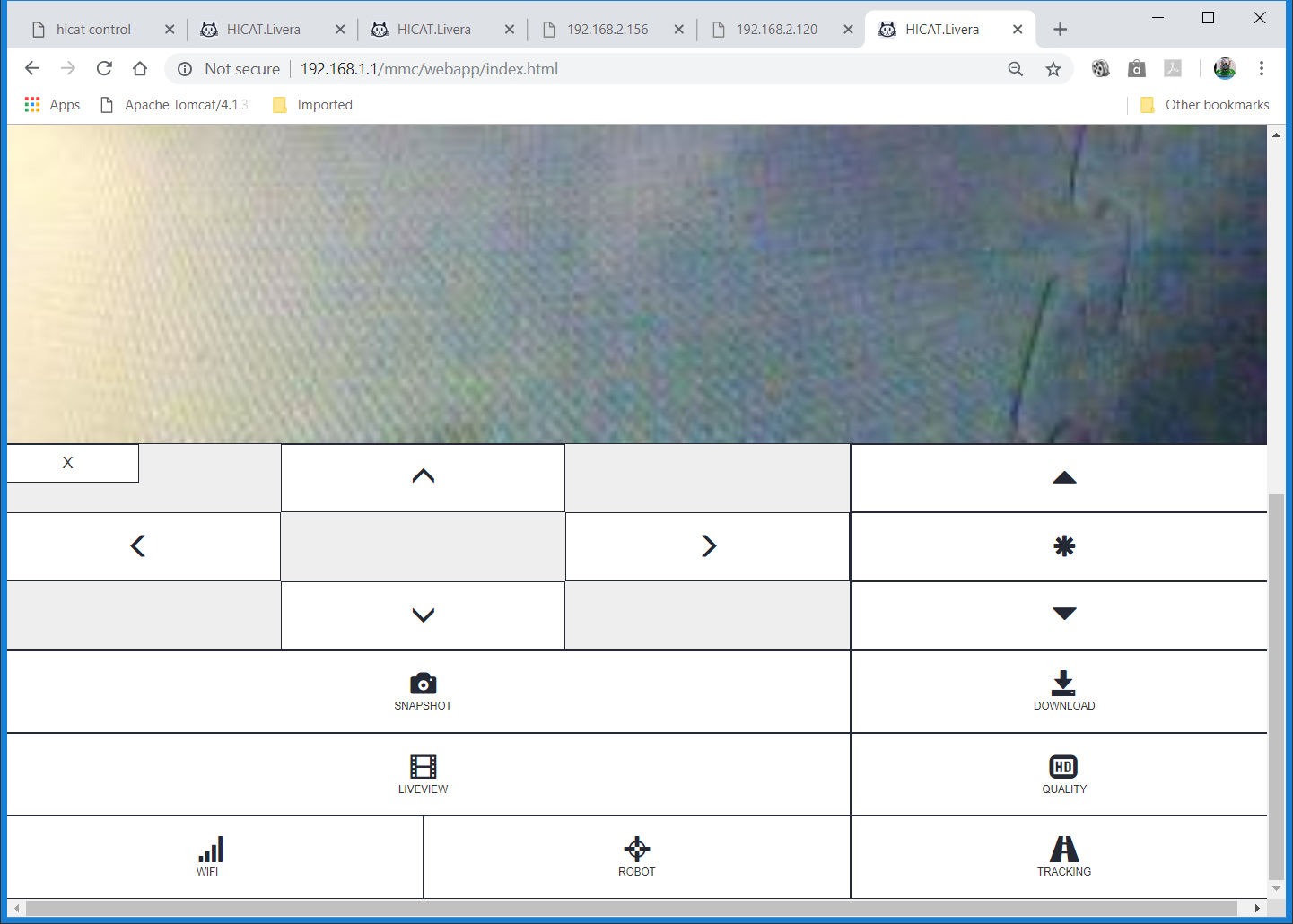
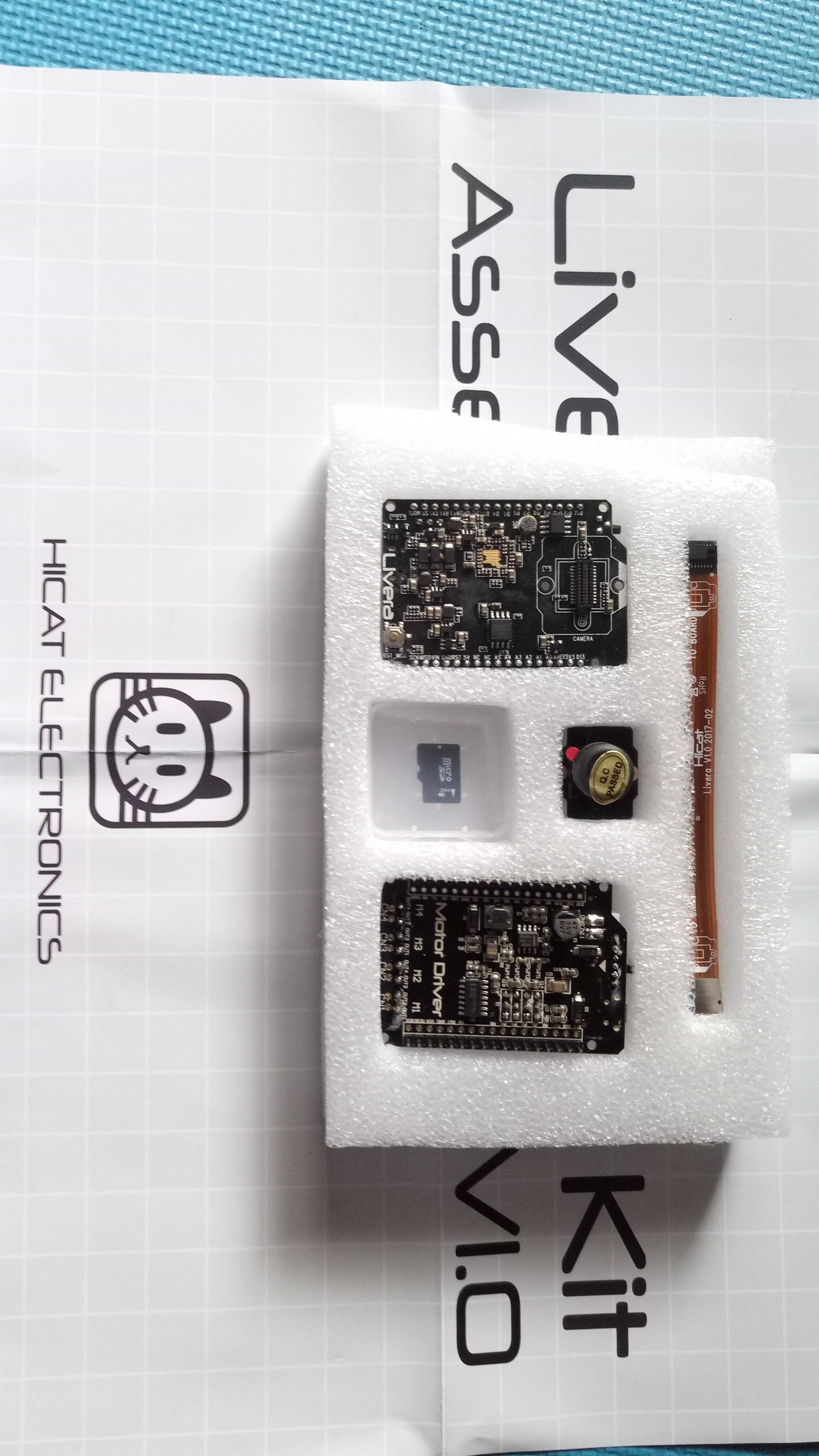
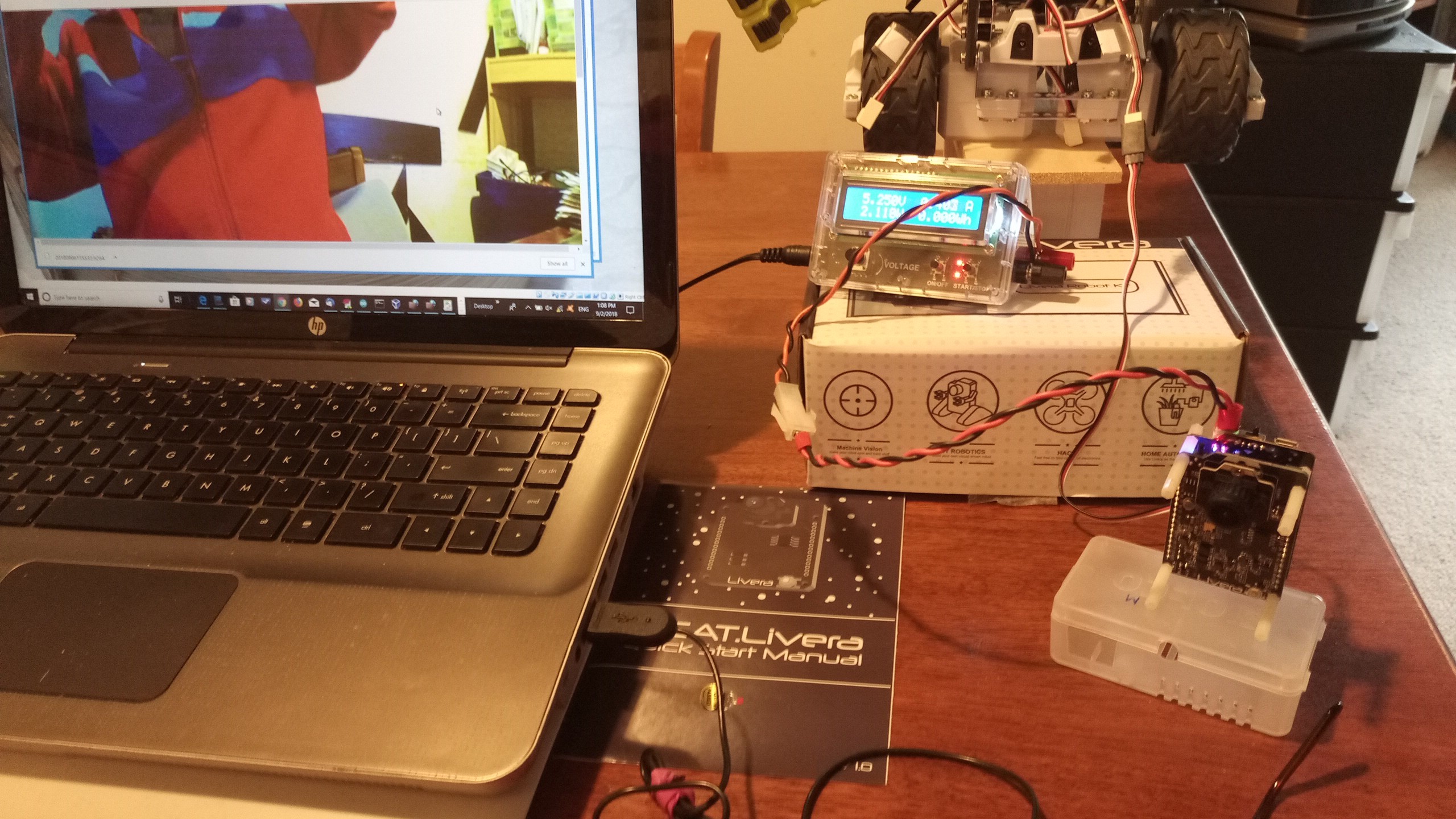
- Phase 2 - Use HiCAT Livera to convert MAX into a Computer Vision-based robot – HiCAT Livera is an inexpensive machine vision platform for robotics. It consists of a camera, an embedded Linux platform with WIFI and a Arduino Leonardo compatible microcontroller in a small package. It is the latter that allows the use of the Arduino library developed in Phase 1 to perform low level control of the MAX.
- Phase 3 - Control MAX from the Cloud – instead of controlling MAX using the HiCAT Livera embedded Linux, the video will be streamed to a container running machine vision/deep learning framework in the cloud.

 Mike Rigsby
Mike Rigsby
 Shawn Chen
Shawn Chen
 Luke J. Barker
Luke J. Barker
 Ahmed Azouz
Ahmed Azouz
How did you get the LED matrix to run custom text?