 Daren Schwenke
Daren SchwenkeThis is coming together. Time to start documenting it.
First, I needed a cell discharger to test the capacity of my scavenged cells.
Then, I needed a way to weld them together to build the pack.
After charging all the cells in my BMS initially, I realized I would need to do so a second time to get good capacity numbers. That prompted building a 10 cell charger.
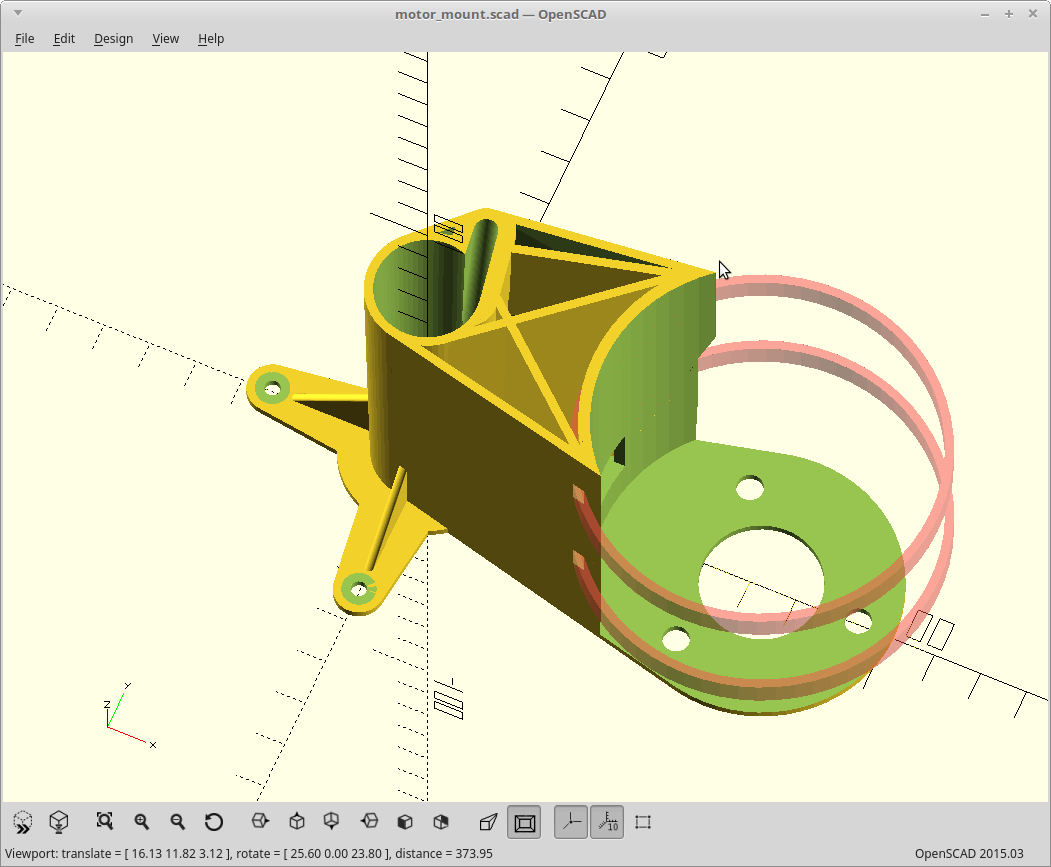
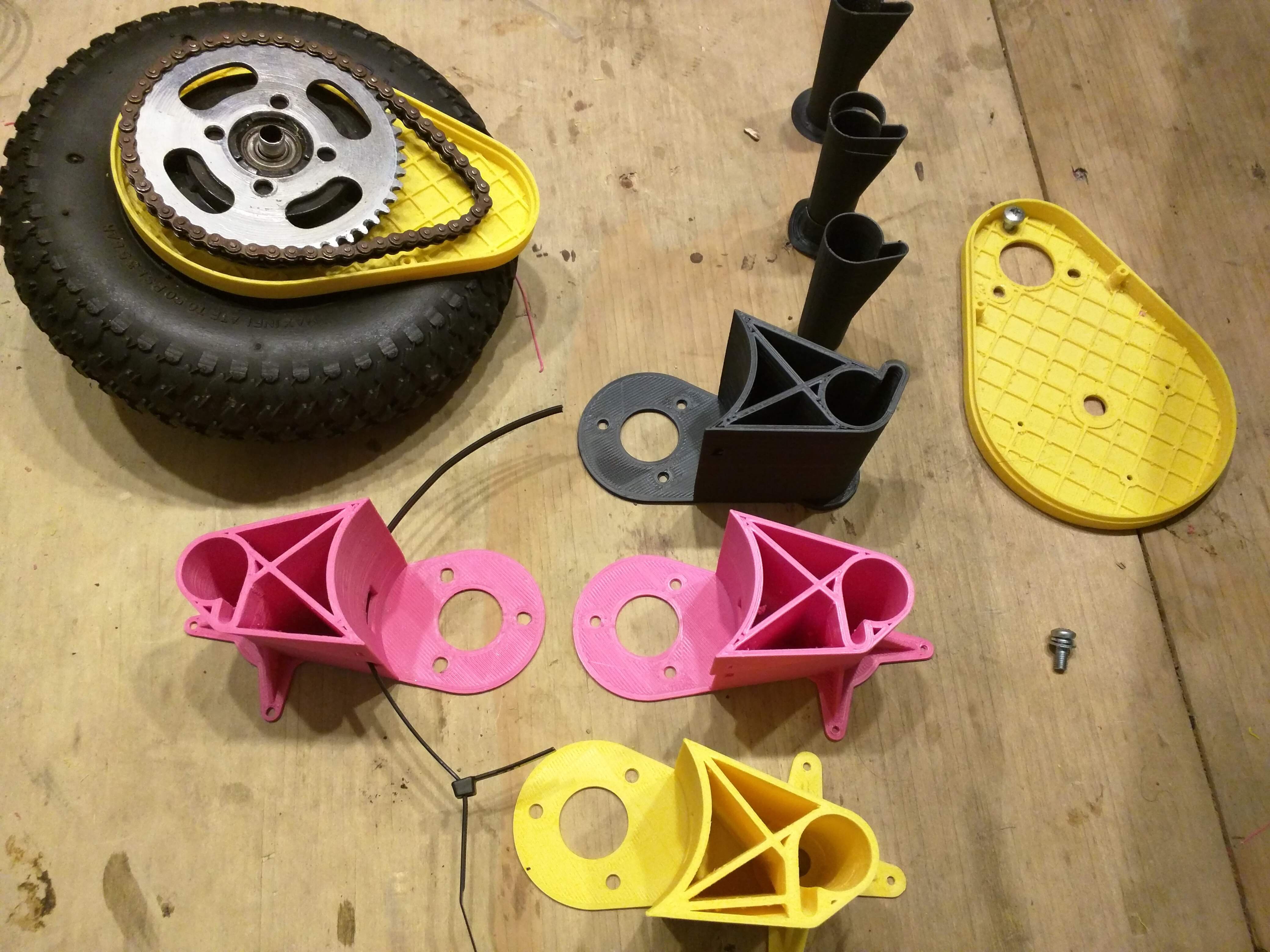
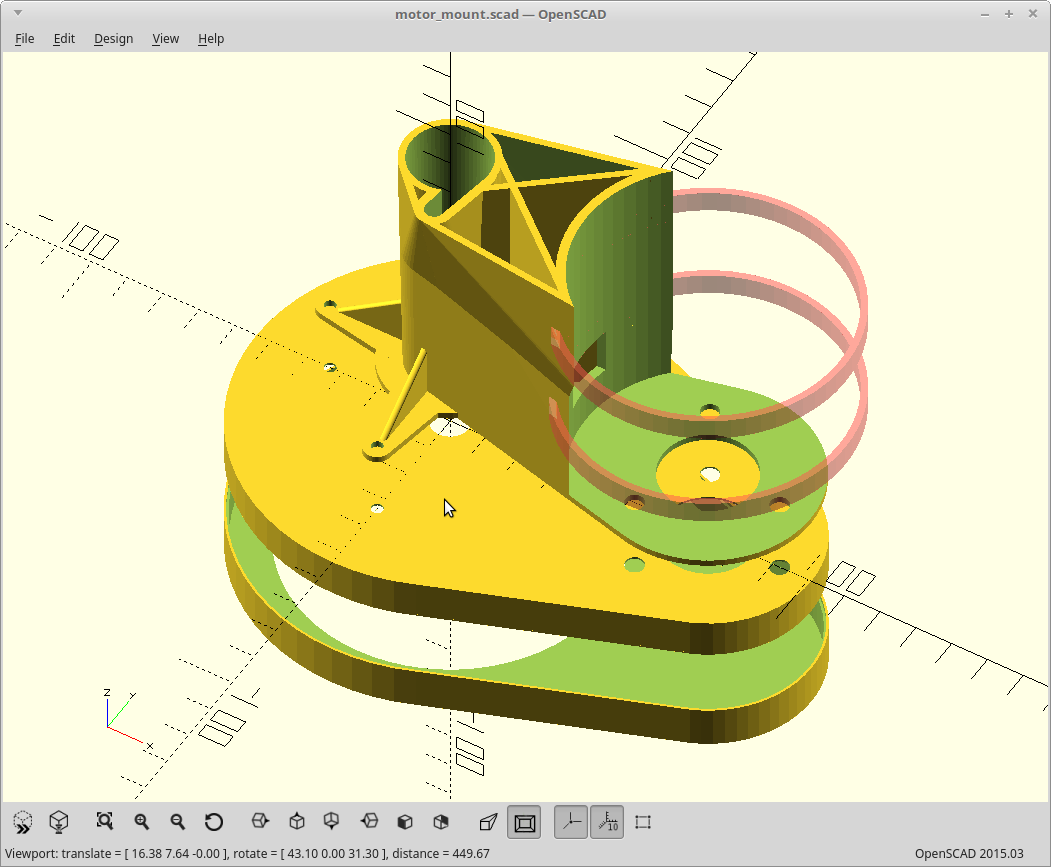
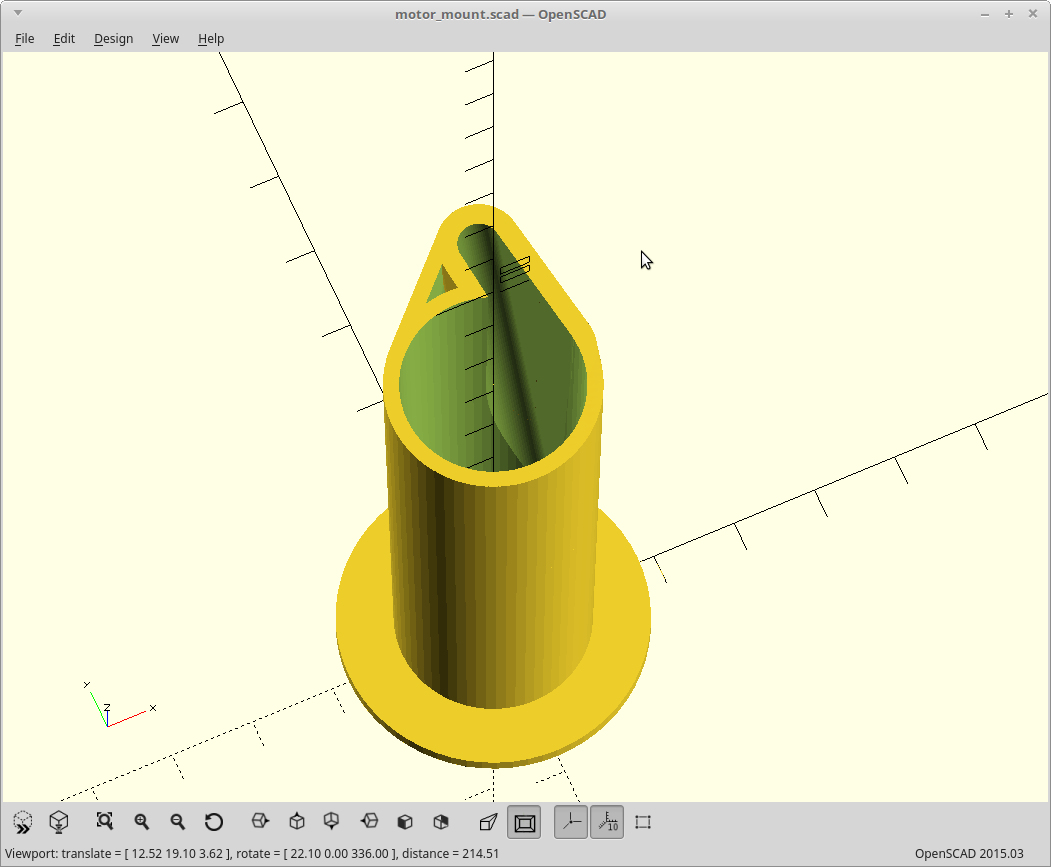
The drivetrain was constructed by cannibalizing two Raz0r scooters I got off Craigslist for $24. The scooter rear wheels were 'turned' to free the sprocket mounting hub from the solid urethane wheel, a corresponding circular groove was cut in my mountain board wheels, and the two were glued together x2. The entire process was captured on video, but it *still* needs a lot of editing.
Instead of hanging the battery pack below or mounting it on top of the existing board, I inlaid the 10s5p battery pack within the thickness of the board. The 50 cells I'm using required a good deal of the board to be removed, so I made the board about 4mm thicker to help offset this and to accommodate the height of the cells by gluing on a sheet of luan flooring plywood. The flooring plywood was pretty dense stuff and had the same layer thickness as the mountainboard plywood, so that worked well. The board was curved in two directions and both ends kicked up at a 20 degree angle, but some creating clamping and bondo fixed that.
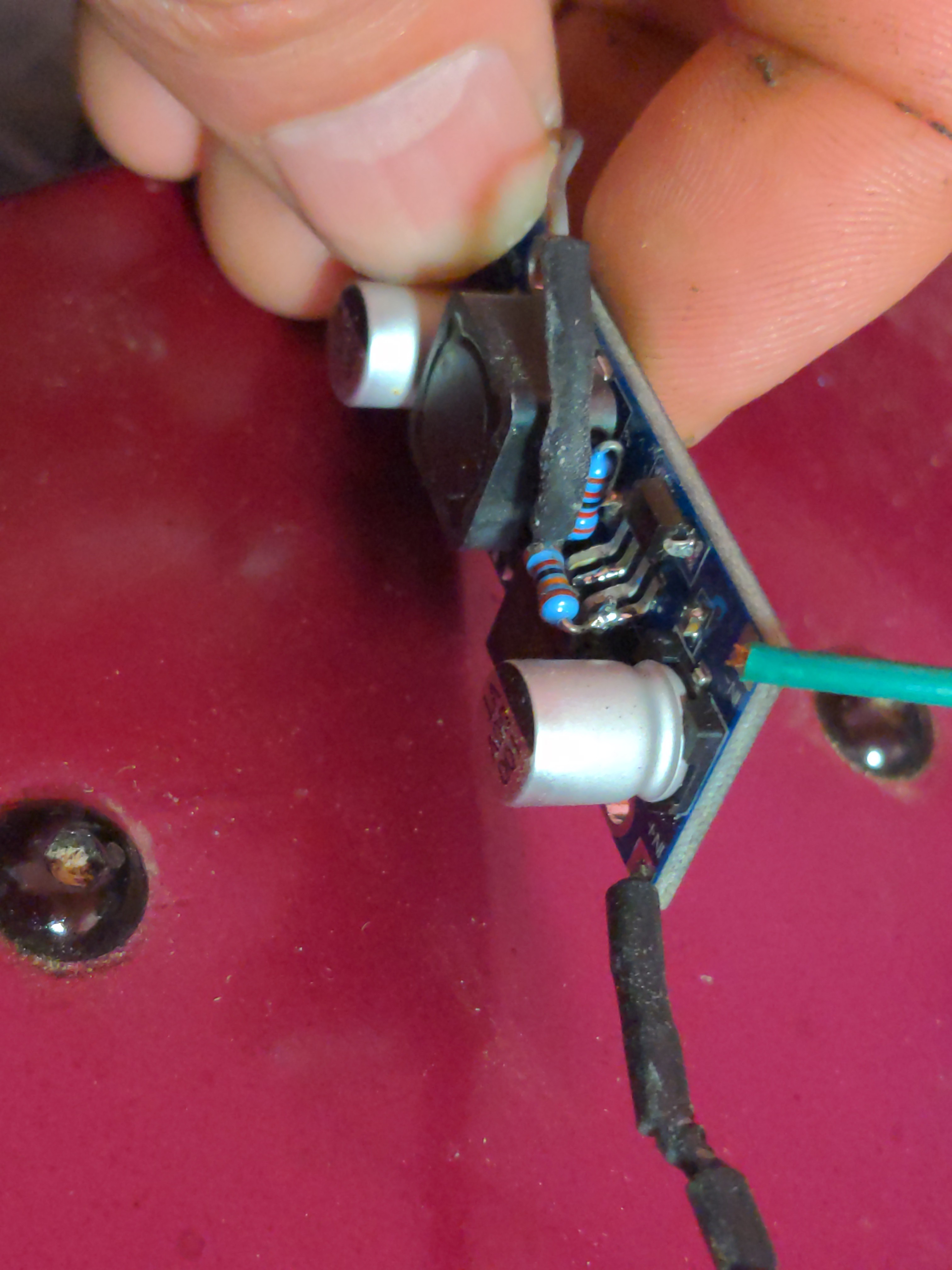
For the hand control I decided to adapt an aftermarket Wii Nunchuck. They have an I2C interface, which I already have talking to a 3.3v Arduino Pro Mini. Using the 3.3v version allows me to directly power the NRF24L01 module I intend to use to talk to the board. The plan for the control protocol is to just send everything the Wii Nunchuck produces, with a prefix (to key the board to the controller). I may scale down the accelerometer data if it proves to be too much. There is a small OLED display in the remote (it is clear/blue), but I have nothing to send to it yet.
The corresponding receiver for the board may get an STM32 just so I can have 7 channels of PWM and I2C without bending over backwards. That's 4 channels of PWM for the motor control which are time critical to prevent 'shoot through' as I'm building the motor controller, and 3 channels for the lighting, cause you know... RGB undercarriage lights are just that important. The good news is I have them and they also provide 3.3v to power my NRF24L01 modules. The bad news is I've never worked with them before.
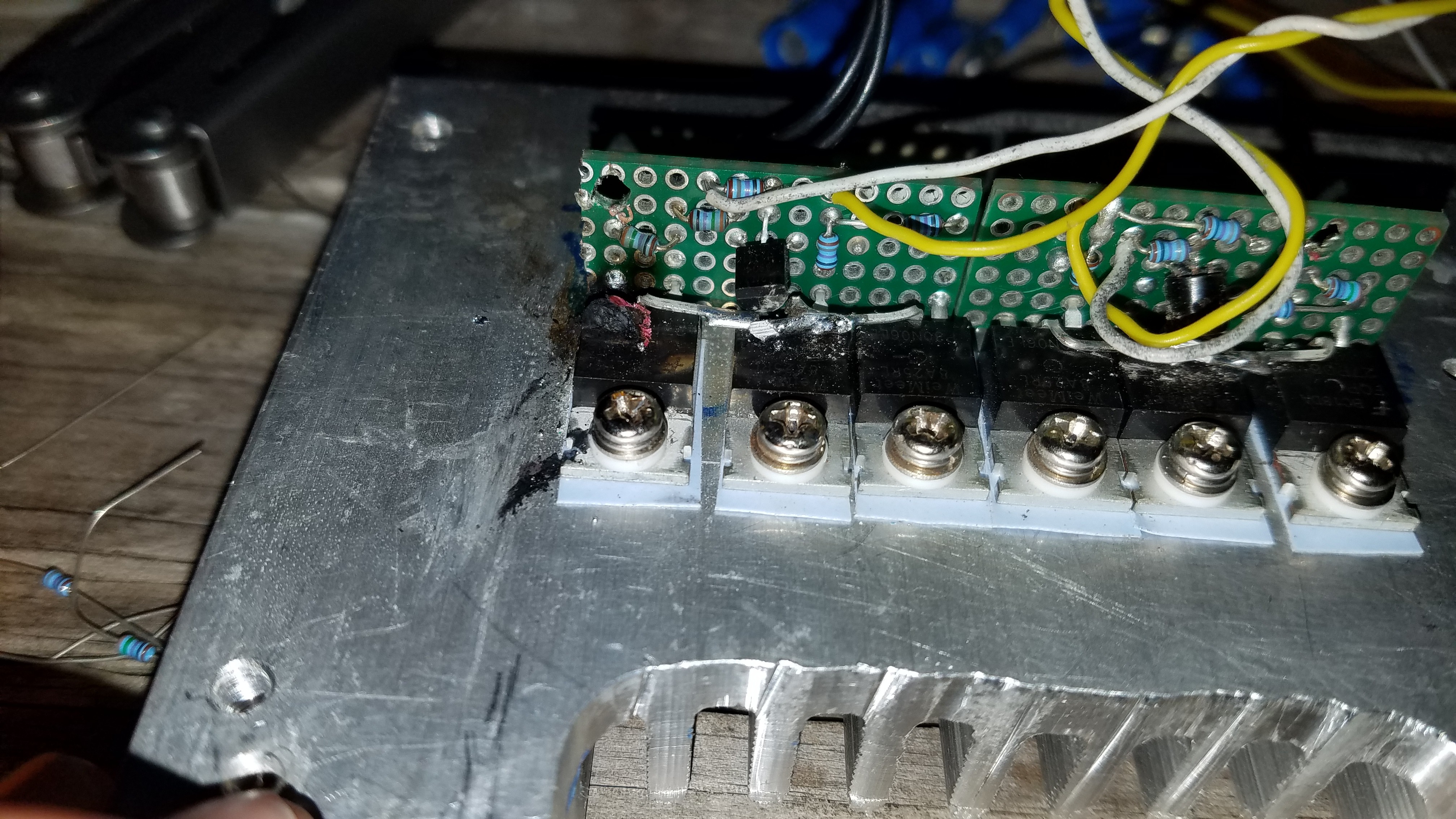
Motor control is via two parallel N channel mosfets for forward, and a single P channel mosfet driven with an NPN transistor for active braking. A schottky diode across the N channel mosfets provides simple regenerative braking using the inductive spike provided by PWM and the motor armature during passive braking (aka coasting to a stop). (apparently this only works if you keep the PWM from dropping to zero though, so I may need to implement reading the motor speed via back EMF to really make this work) This is all repeated twice for independent control over each motor and should allow using the X axis of the Wii Nunchuck for 'power steering' and/or turning the board into an RC car of sorts. :)
Ground effect lighting is provided by two RGB strips under the battery showing through the bottom cover. They are rated at `12v and are driven with three mosfets, PWM limited to 33% max, from the 42-36v provided by the Li-ion battery.







 Jorj Bauer
Jorj Bauer
 Timo Birnschein
Timo Birnschein
 mauswerkz
mauswerkz
 Sophi Kravitz
Sophi Kravitz