 davedarko
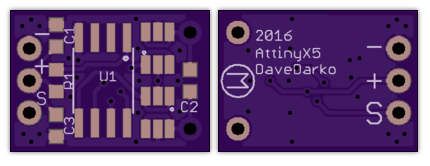
davedarko"Recently my dad made me buy some pwm to dc motor controllers (20EUR) for him, basically a servo motor setup but without the analog position and designed for a continuos motor mode. With that order I got me some attiny85s and some dual channel NP mosfets to start building something like that..."
- copied comment from myself on @Radomir Dopieralski s #Ensmarten Your Servos project.
Man I'm lazy.
Pricing Stuff
- I should (read: have to ) calculate this on every project
- 1.50 EUR per attiny85
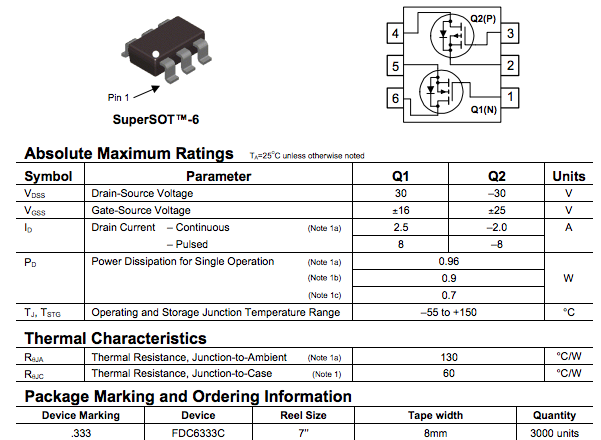
- 2x 0.71 EUR for the MOSFETs
- some caps and resistors
- 1.50 EUR pcb yet to be designed but shouldn't be much more than
So around 5 Euros give or take. Sounds much better than 20 bugs. Software will be tricky though, but since it's hobby - it's free.





 Jordan
Jordan
 iSax
iSax

 Yes Eyecan
Yes Eyecan
Hi,
I can't actually work out what you are trying to do!
A schematic of your board and a description of your project would help.
The MOSFETs will be fine for small motors that you are likely to be considering.
The rule with high powered MOSFETs is that both the upper and lower transistors are turned off before switching. You will see designs where each transistor is controlled by the MPU. Apparently (unlike Bipolar transistors) the transition current can kill them because the switching times are slow (and they can over-heat).
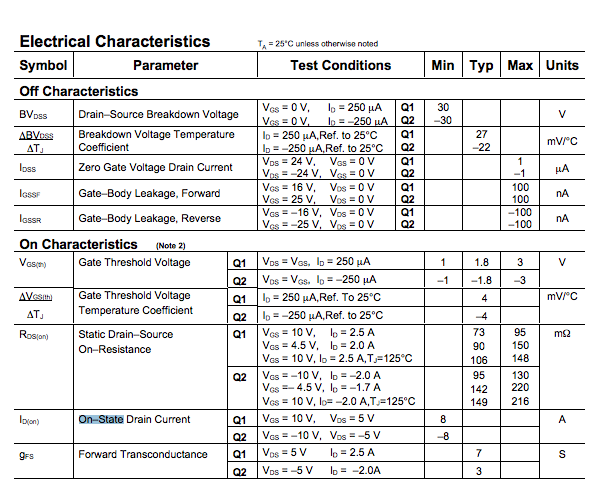
Probably not be a problem at your power level and with these devices as the gate capacitance is only 200 to 300 pF (pretty low) and switching time is in the order of 10 ns (pretty fast).
Depending on the motor and your power supply you may need to use PWM. So you will need to use the timers on the ATTiny85 (I hope you like reading the ATTiny85 datasheet) for PWM.
For the ATTiny85 I would suggest using a DigiSpark (at least to debug your project) as it can be used with the Arduino IDE (there are other ATTiny85 based produces like the DigiSpark you can use as well). You may have to hunt down libraries for the ATTiny85 unless you love to code!
Do some research on motor noise (electrical), it can make life difficult if precautions are not taken. Controlling motors with a MPU can be surprising hard (if you are unlucky).
AlanX