 Max.K
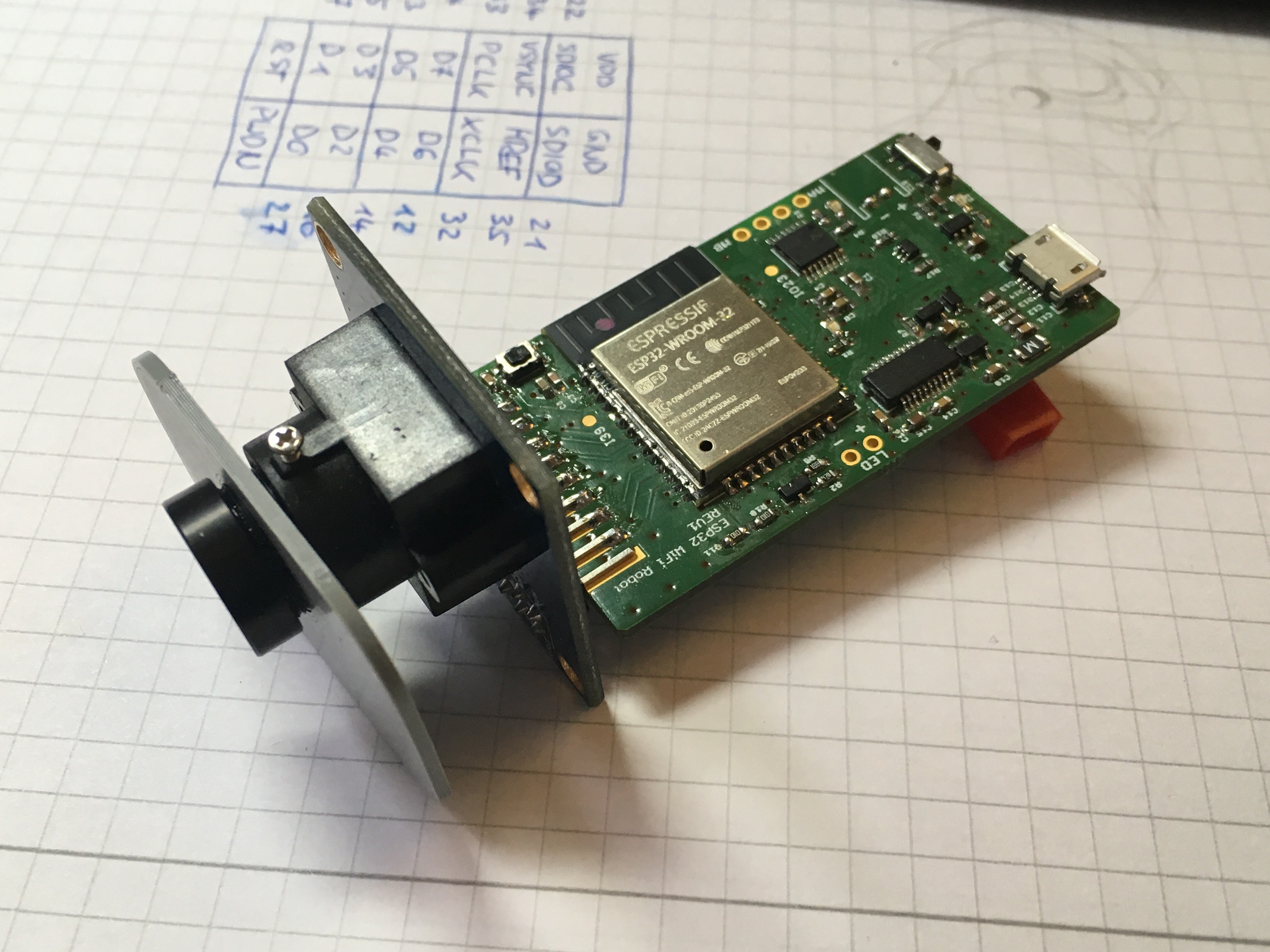
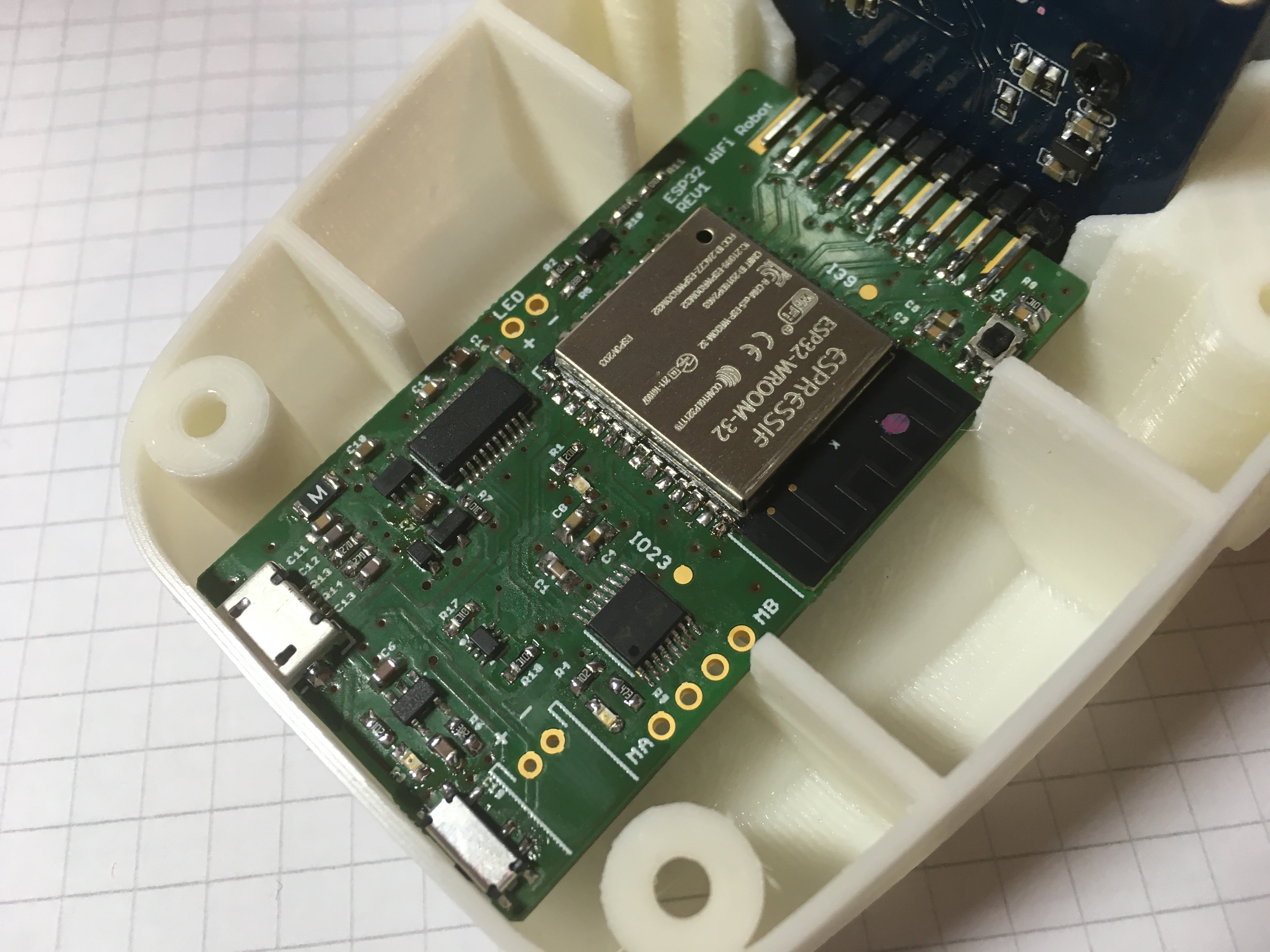
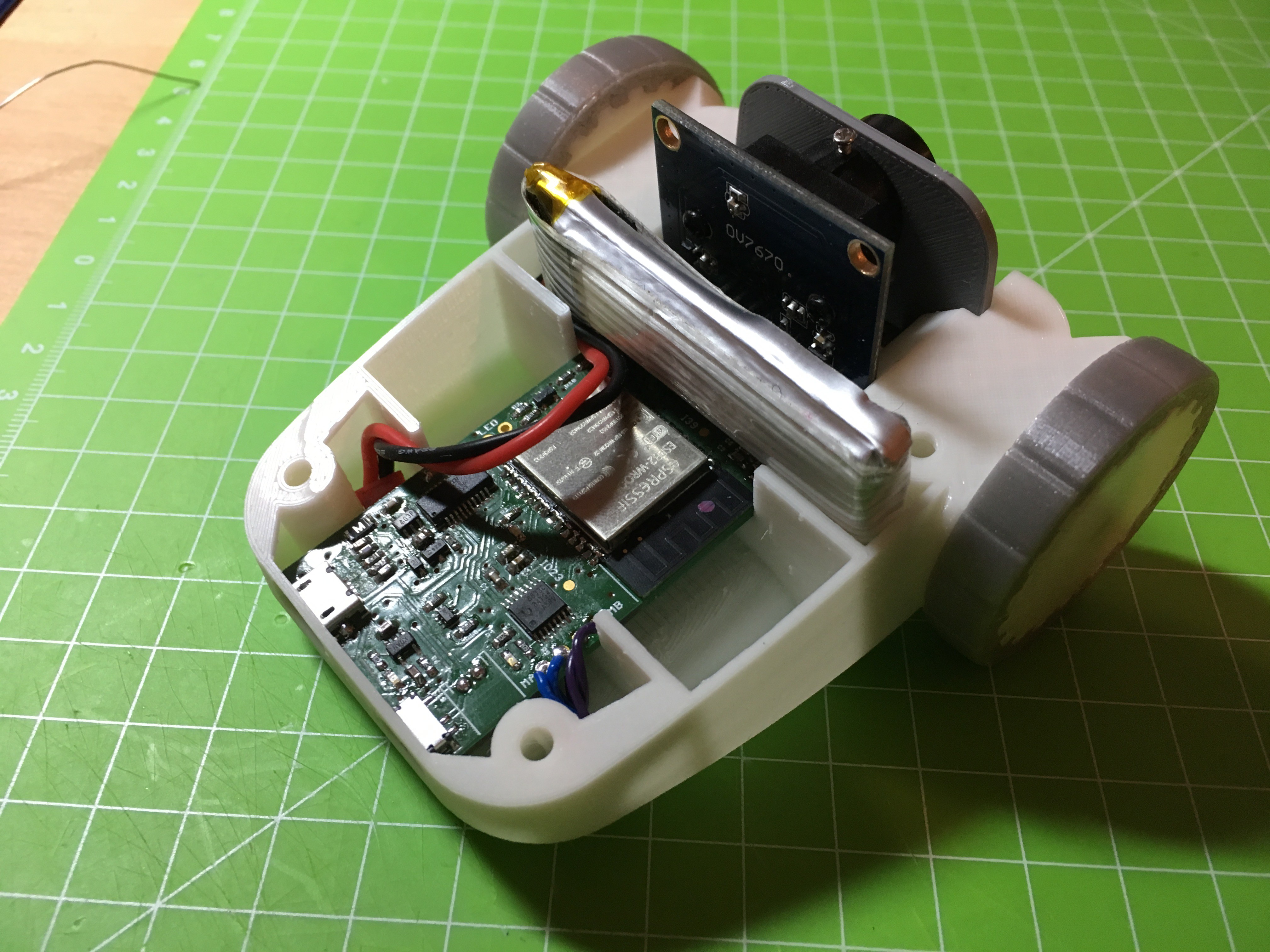
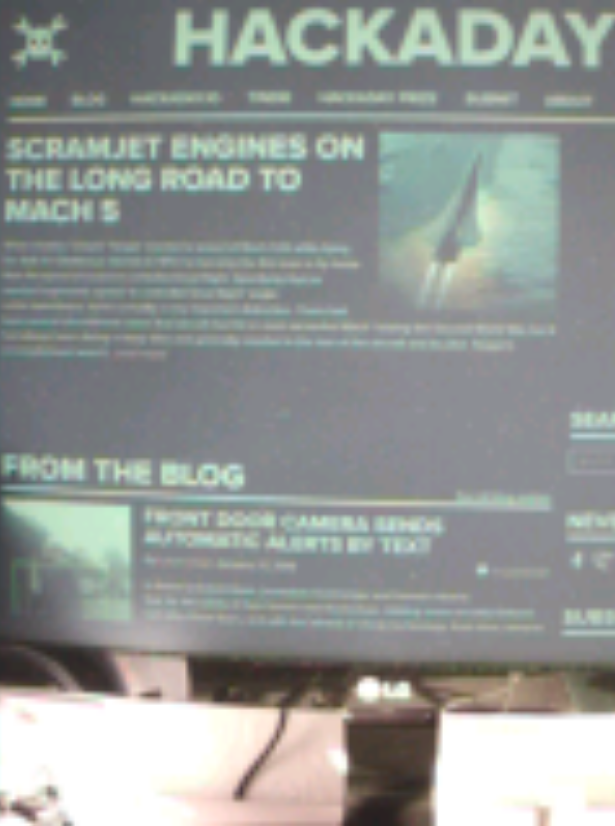
Max.KThe ESP32 requires no app, it can be controlled from any PC or mobile device that has a web browser. Unlike with other browser based robots, the web interface uses a virtual analog stick, which works accurately with any touchscreen or mouse. Even keyboard input is accepted. The streaming resolution can be considered potato-quality at 160x120px. It still surpasses the Gameboy camera and has 8-bit color. The robot can be used in access point mode or it can connect to an existing WiFi router. A single cell LiPo battery powers the robot and can be recharged from a micro USB port, which is also used to program the ESP32. Additional features include temperature and battery voltage monitoring and a bright LED output. To make the robot as compact as possible, the components are soldered to a custom PCB.
If you are interested in this robot and want to build it yourself, be warned that the development is not 100% complete. The Zerobot (Pro) might be a better beginners project.










 Enki
Enki
 Husarion
Husarion
 Emmanuel
Emmanuel
 Rodolfo
Rodolfo
我做完這個項目(只用這個此3D殻体,自己修改stl),主控板模块使用:esp32 cam含攝像頭+電機驅動模块TB6612+N20減速電機+Type-c鋰電池充電模塊+3.7v/500mah鋰聚合 電池+5v升压模块+3.3v降壓模塊+2p小開關+杜邦線若干,配線完成
I finished this project (only use this 3D shell and modify the stl by myself), the main control board module uses: esp32 cam with camera + motor drive module TB6612 + N20 geared motor + Type-c lithium battery charging module + 3.7v/500mah lithium polymer Battery + 5v step-up module + 3.3v step-down module + 2p small switch + several Dupont lines, the wiring is completed
post video :
https://youtube.com/shorts/1M_BJFWTJS8?feature=share