 Brian Brocken
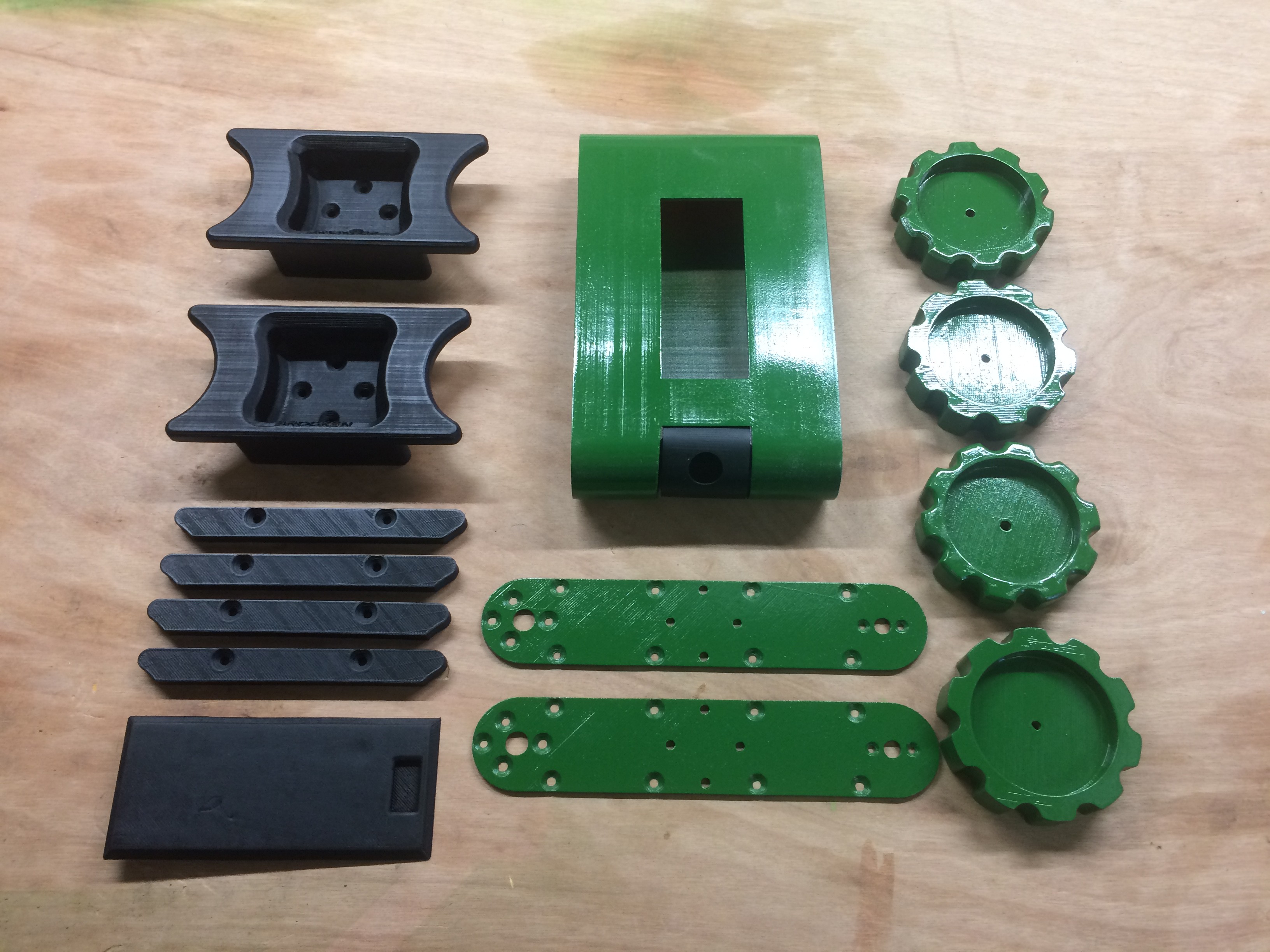
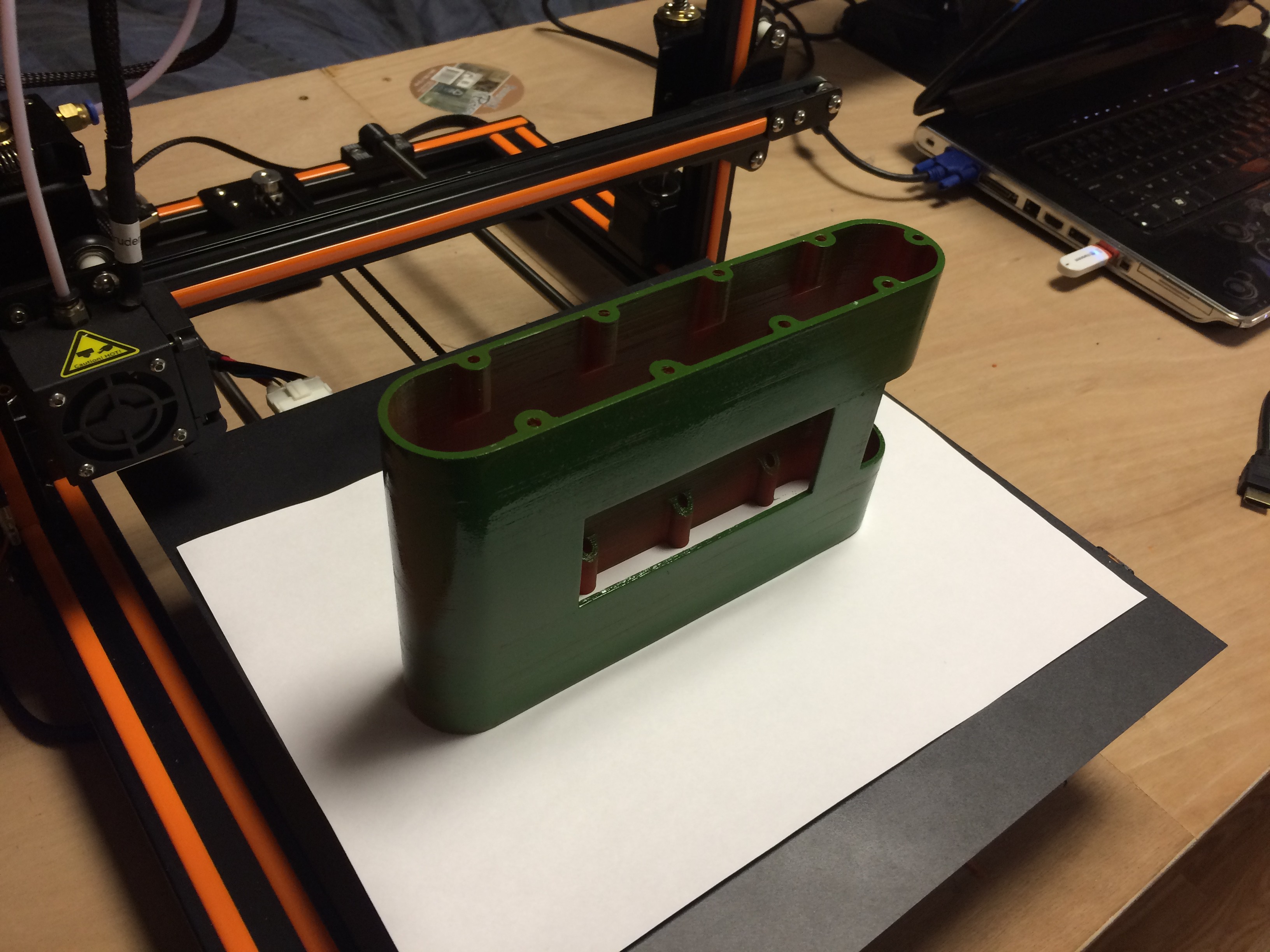
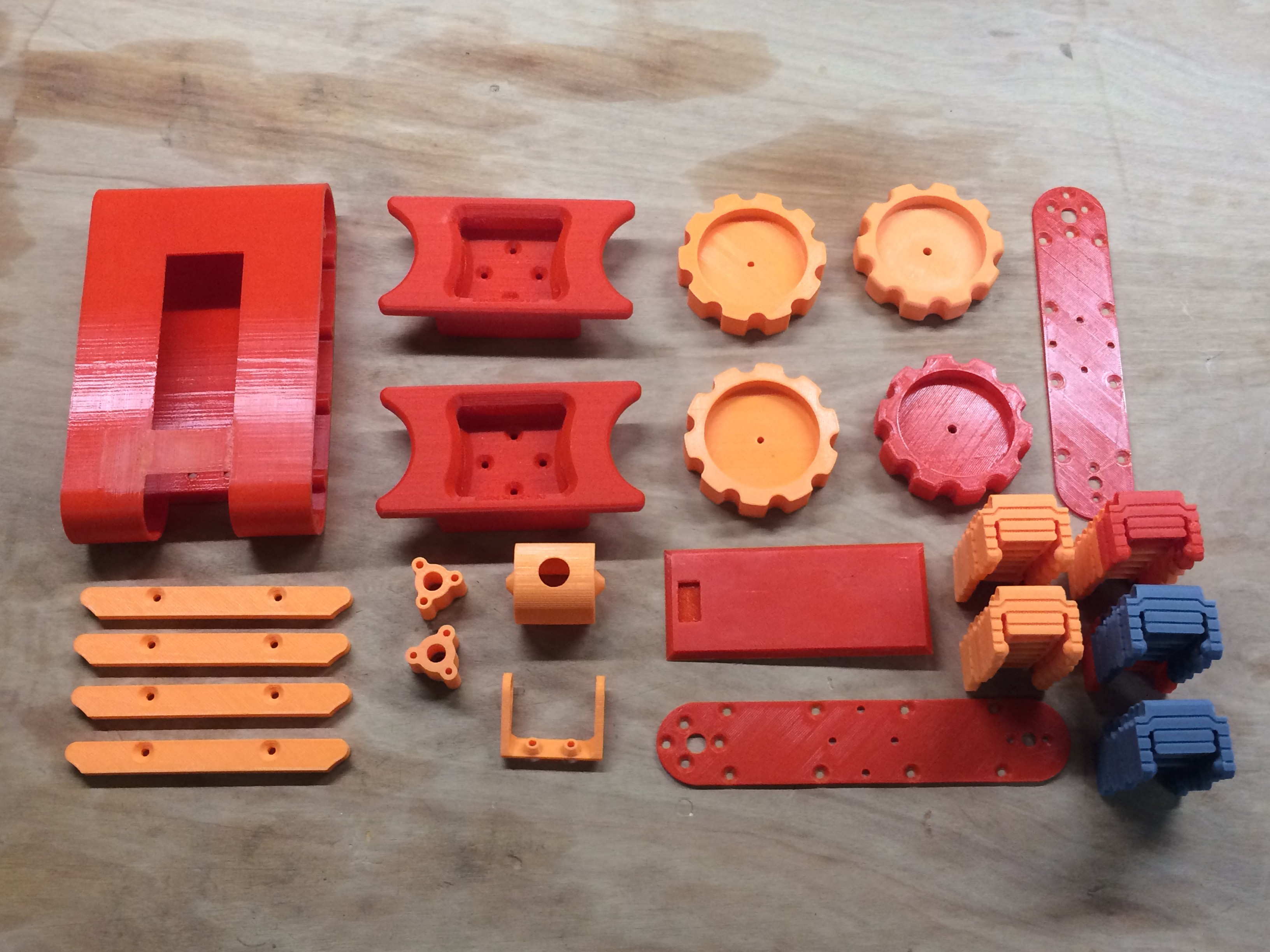
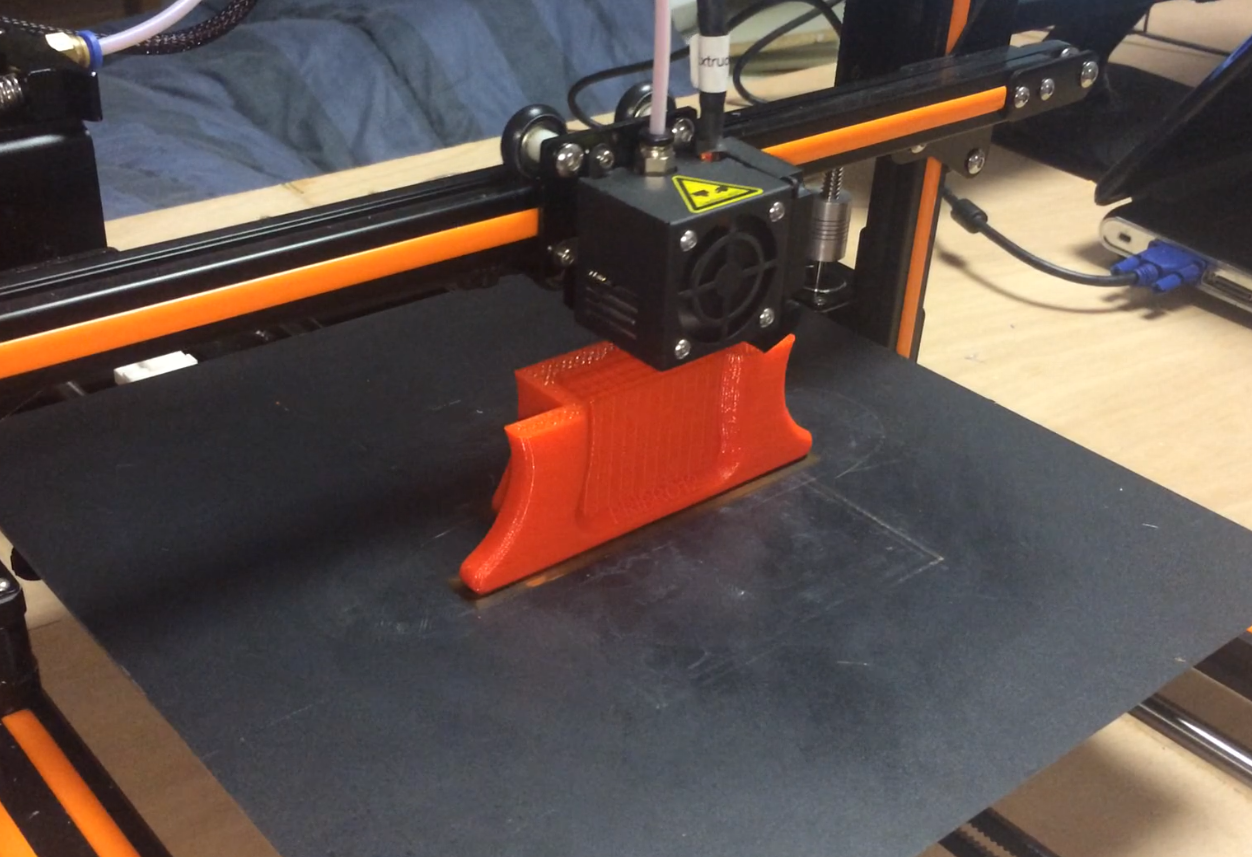
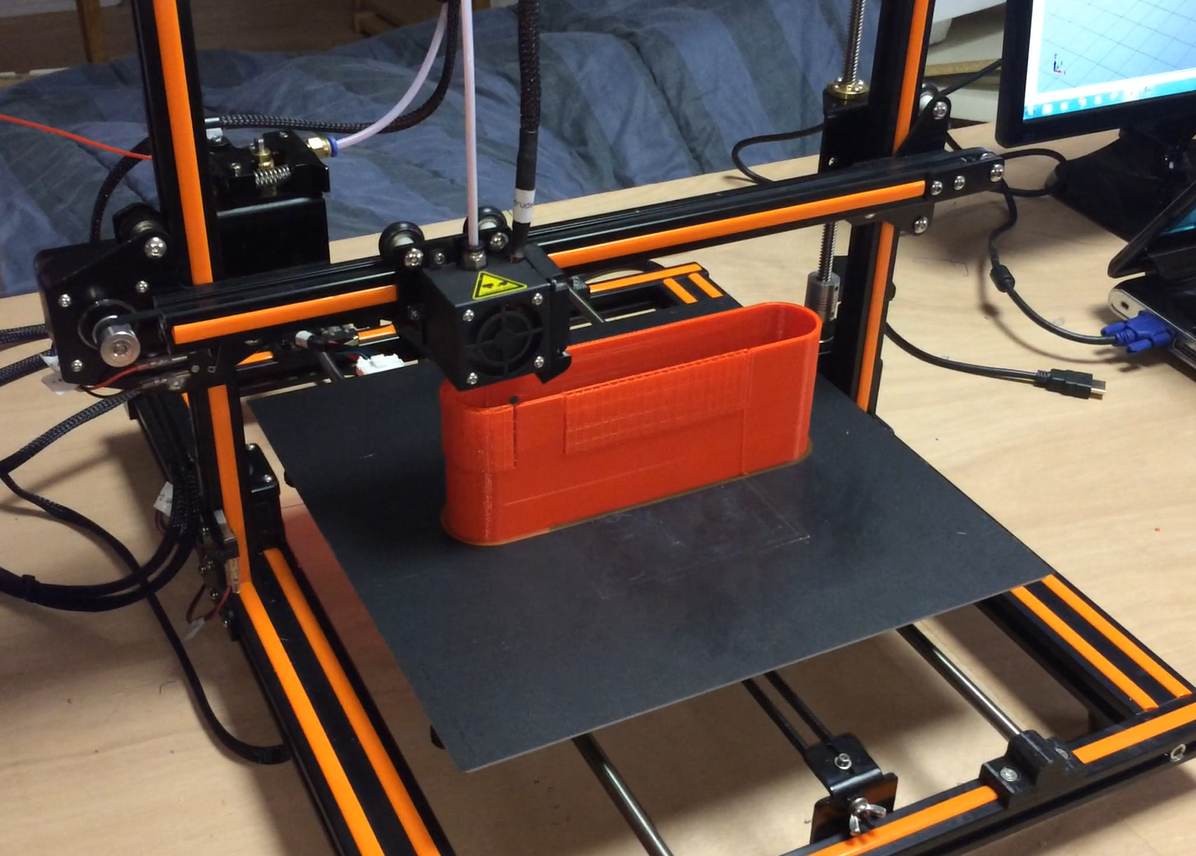
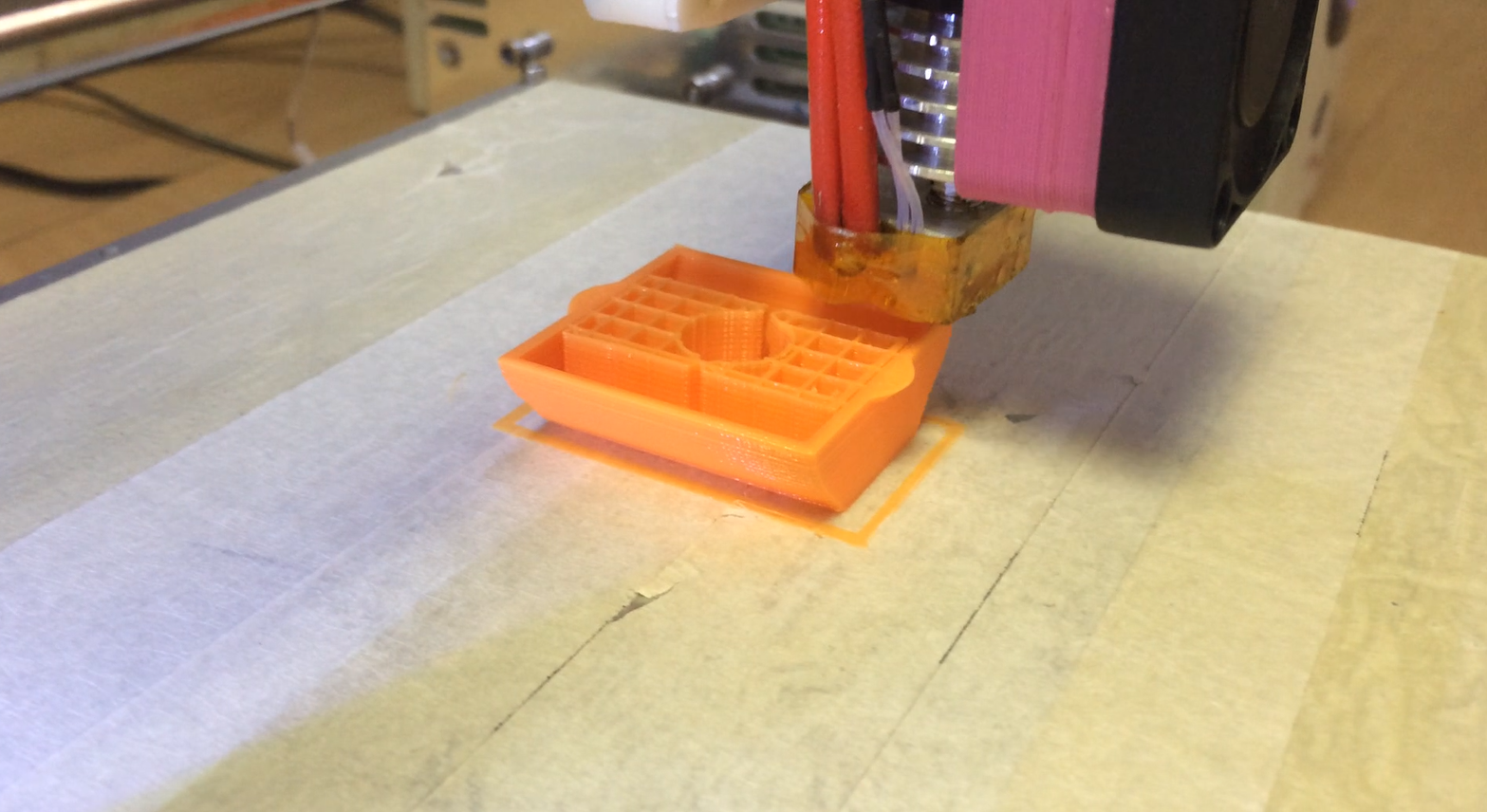
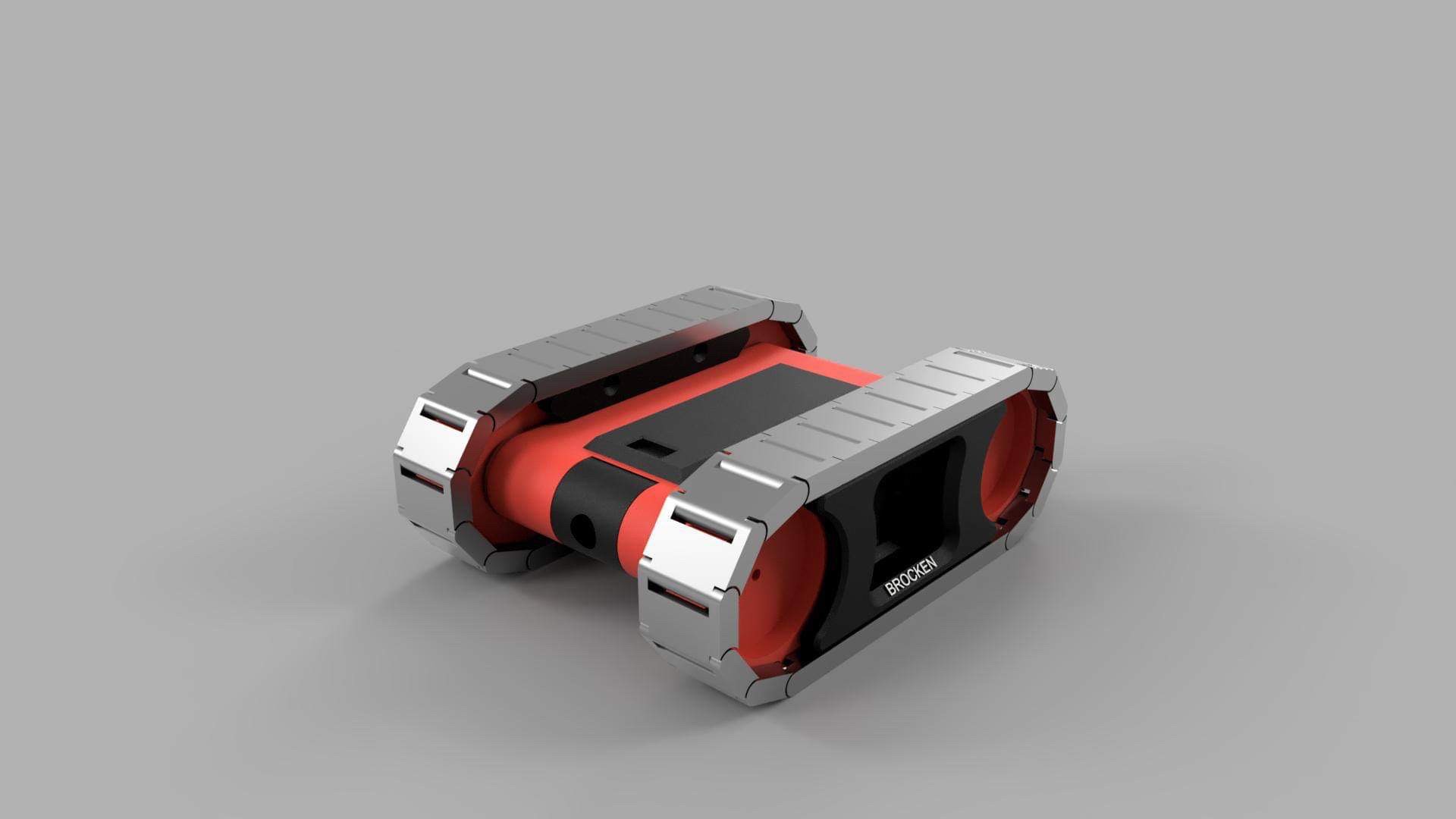
Brian BrockenI designed the tank in a way that it can be almost completely 3D-printed. It's of course inevitable to truely completely 3D print the tank so there are small additional parts needed like bearings, shafts, screws, bolts and nuts. The tracks however are completely 3D-printed and don't need little shafts between every link. They are designed to snap together and stay together. It's very hard to take them apart after they snapped together, which is of course the intention.
I initially used 2 12V 1000 RPM motors but they turned out to be to weak so I ordered some new motors which were the same size but instead of 1000 RPM they are now 100 RPM. If I wanted to put bigger motors in it, I had to completely redesign the tank which would take up to much time as I already 3D-printed all the parts.
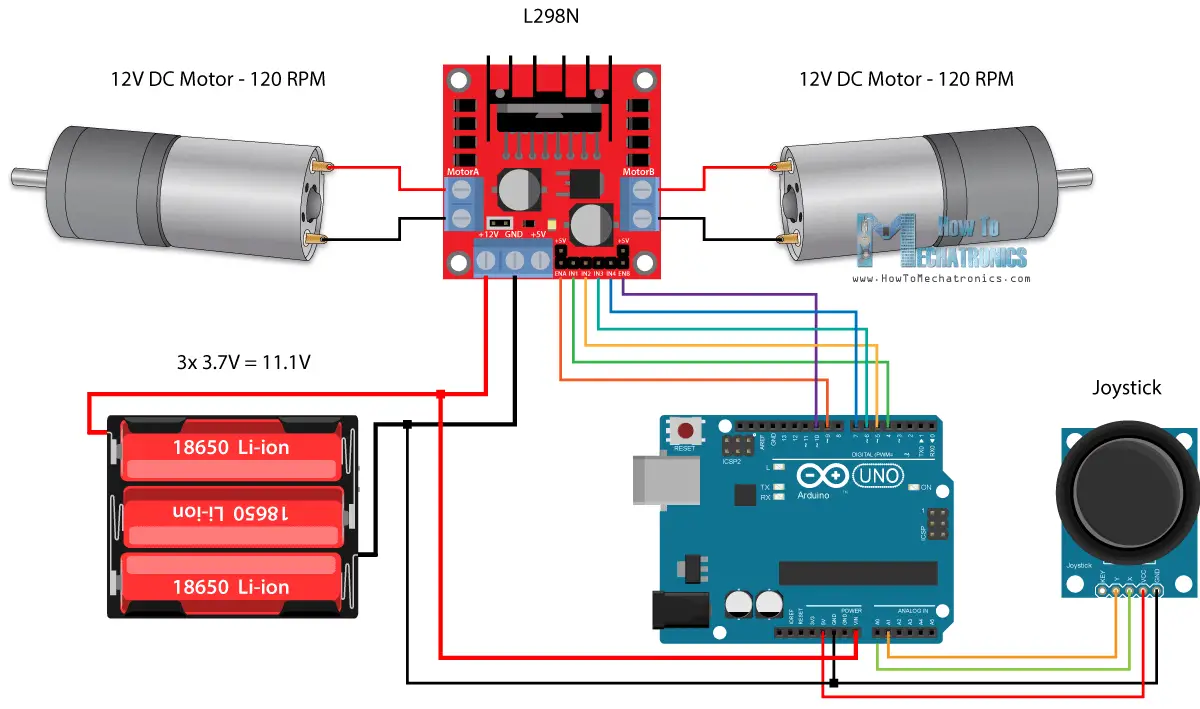
The 2 motors are currently being driven by a L298N motor driver which is controlled by an Arduino Nano V3. The Arduino reads the data from 2 channels on the Spektrum receiver. I might replace the Arduino and motor driver by 2 car esc's but it's also possible I keep the Arduino so I can connect some sensors to it so I can make the tank perform tasks autonomously.
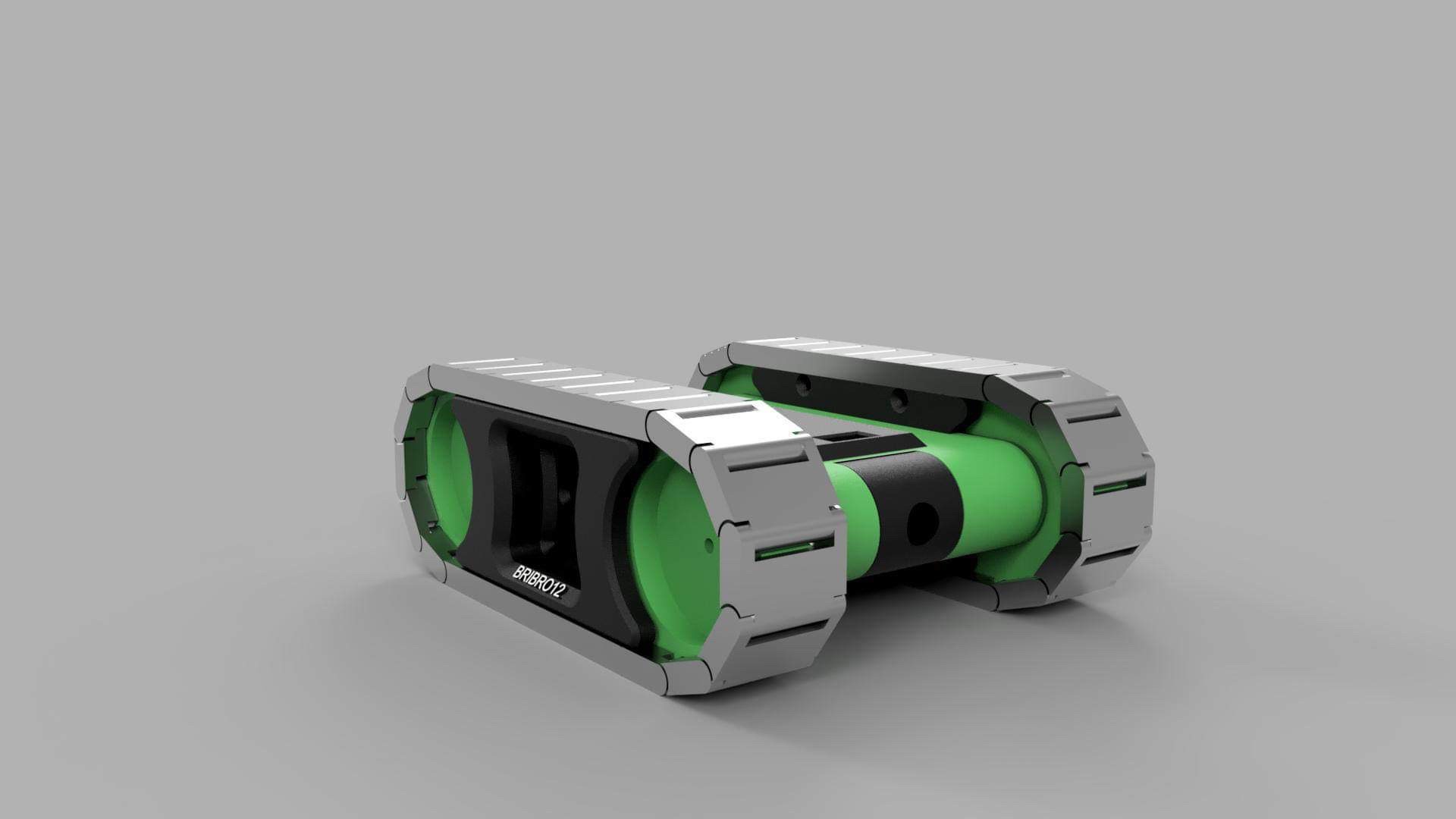
In front of the tank is a camera which is placed inside an "eye" so the driver can look up and down. The up and down movement of the "eye" is obtained by a standard 9g servo. The video feed gets transmitted through a 600mW 5.8gHz transmitter and gets send to some FPV goggles.
The hatch on top of the tank gets hold on by 2 neodymium magnets (1 in the body, 1 in the hatch).
A possible upgrade in the future for this tank would be a robotic arm which would be mounted on top of it.
The tank needs about 23 - 24 treads for one side depending on your print quality.
STL and Fusion 360 source files can be found here: https://bbprojects.technology/collections/stl-fusion-360-source-files/products/rc-fpv-tank-rover-files
Video:















 davedarko
davedarko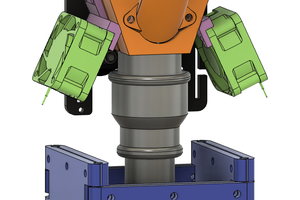
 Otto Gloeckner
Otto Gloeckner

 Hacker House
Hacker House
what fpv goggles would i need to buy for the camera and how to set it up? and what remote is compatible with the equipment? im new to this stuff.