 Malte Schrader
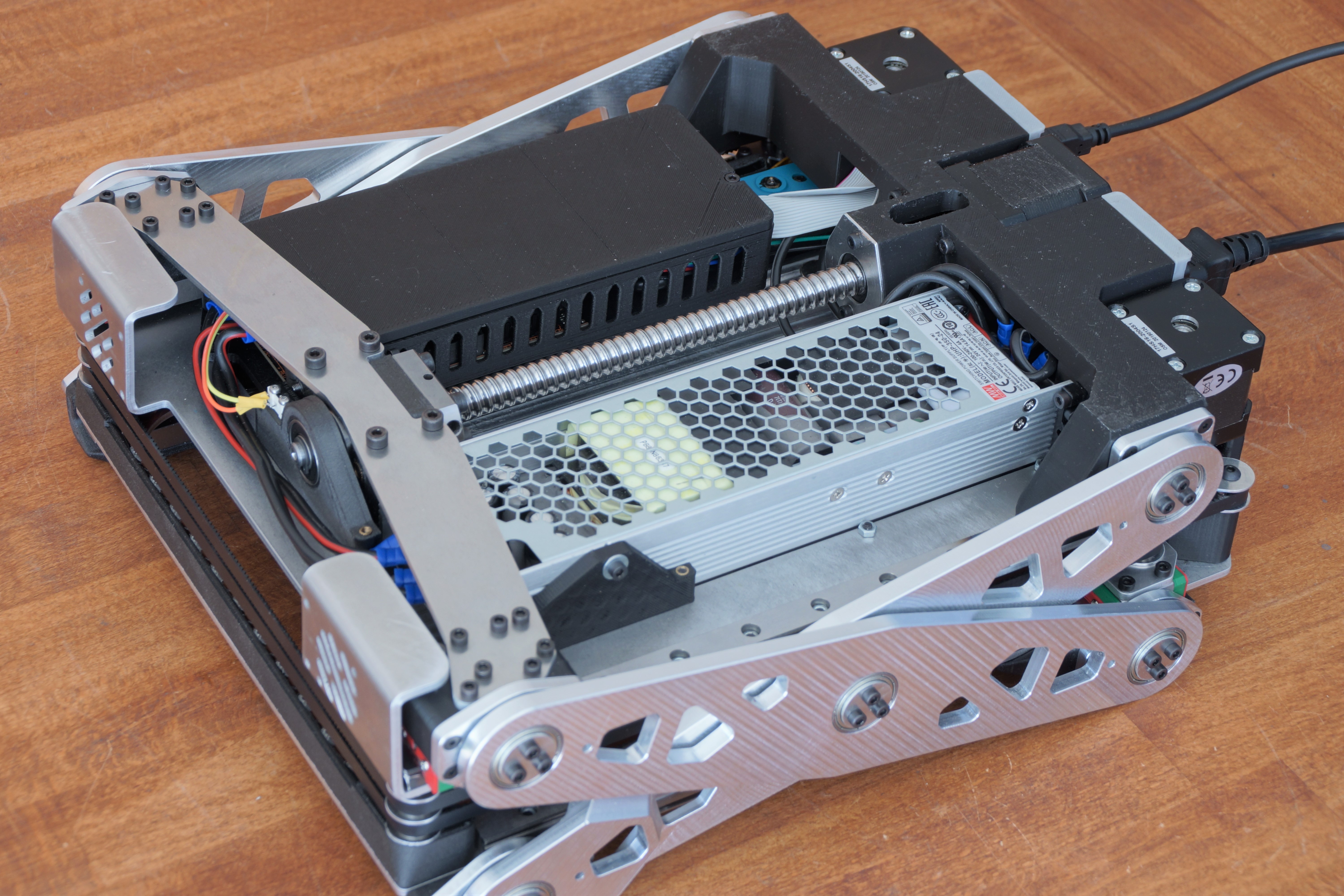
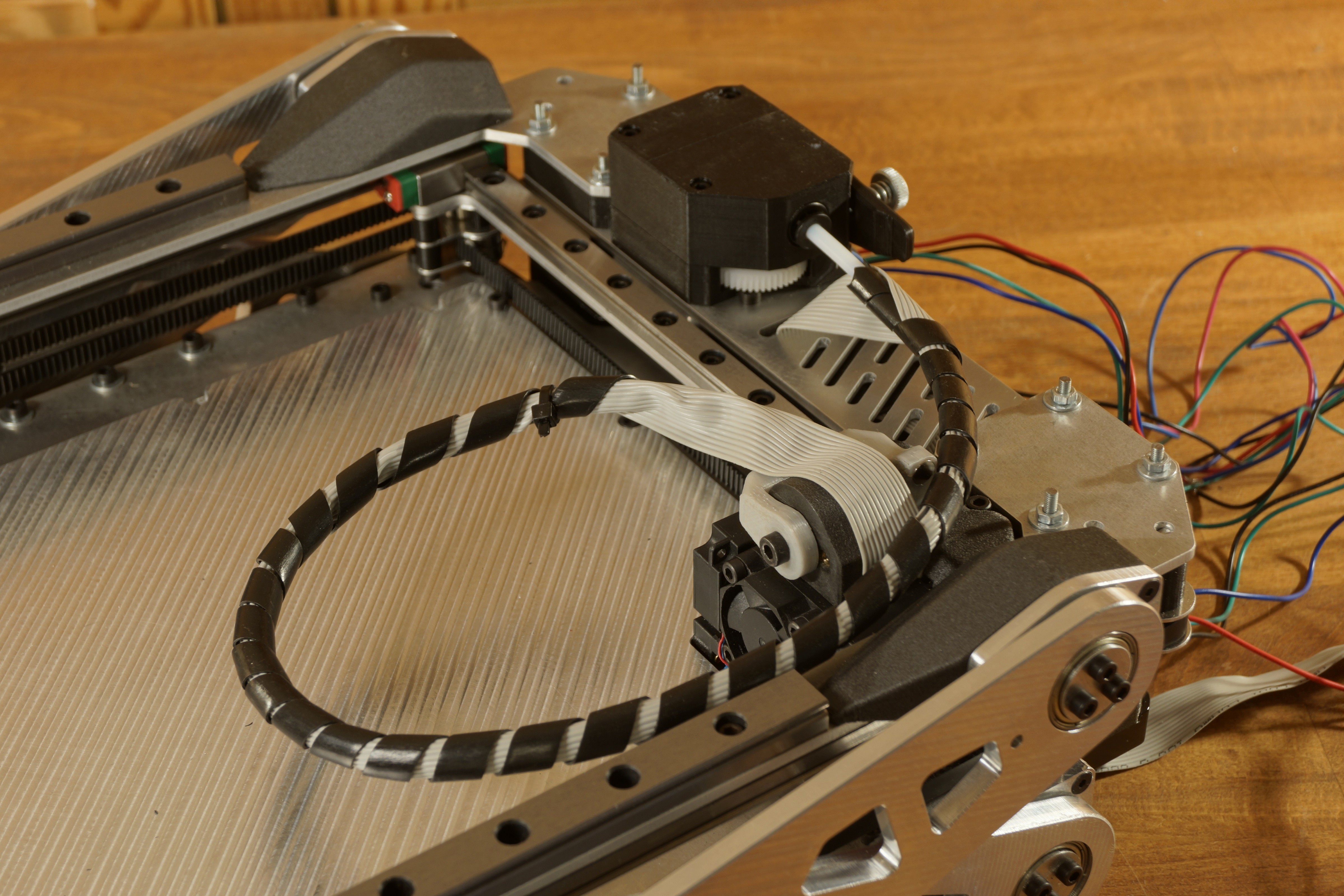
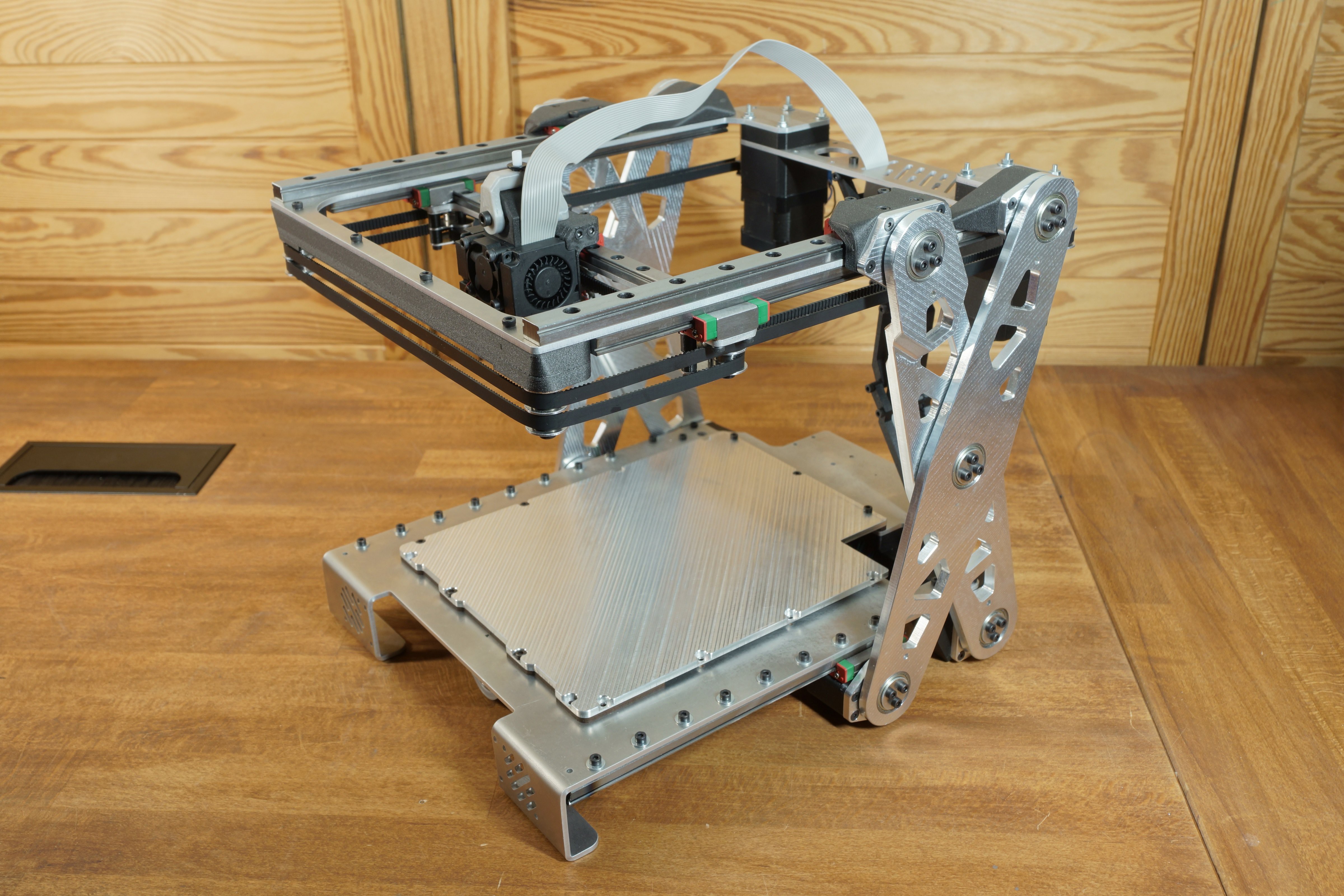
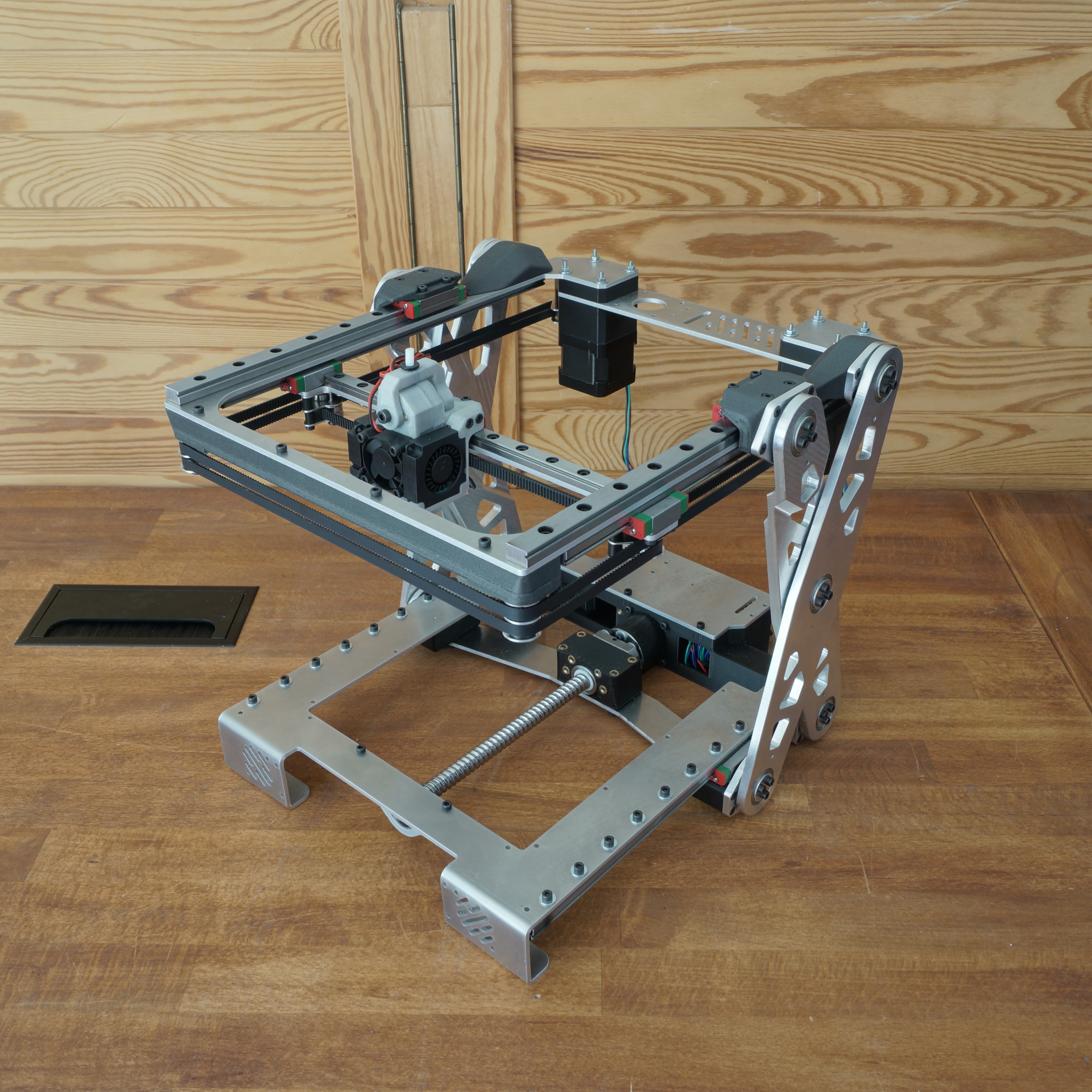
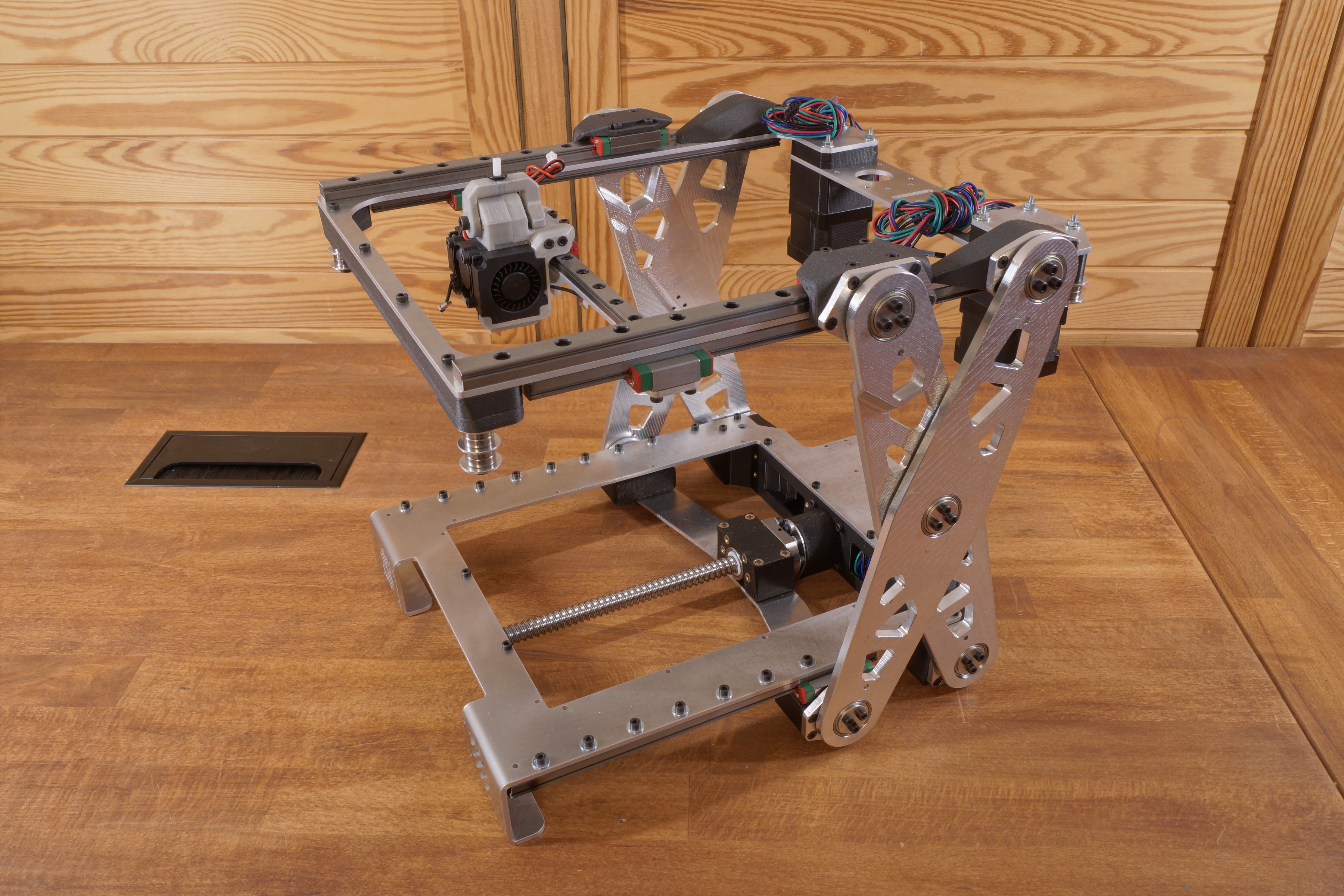
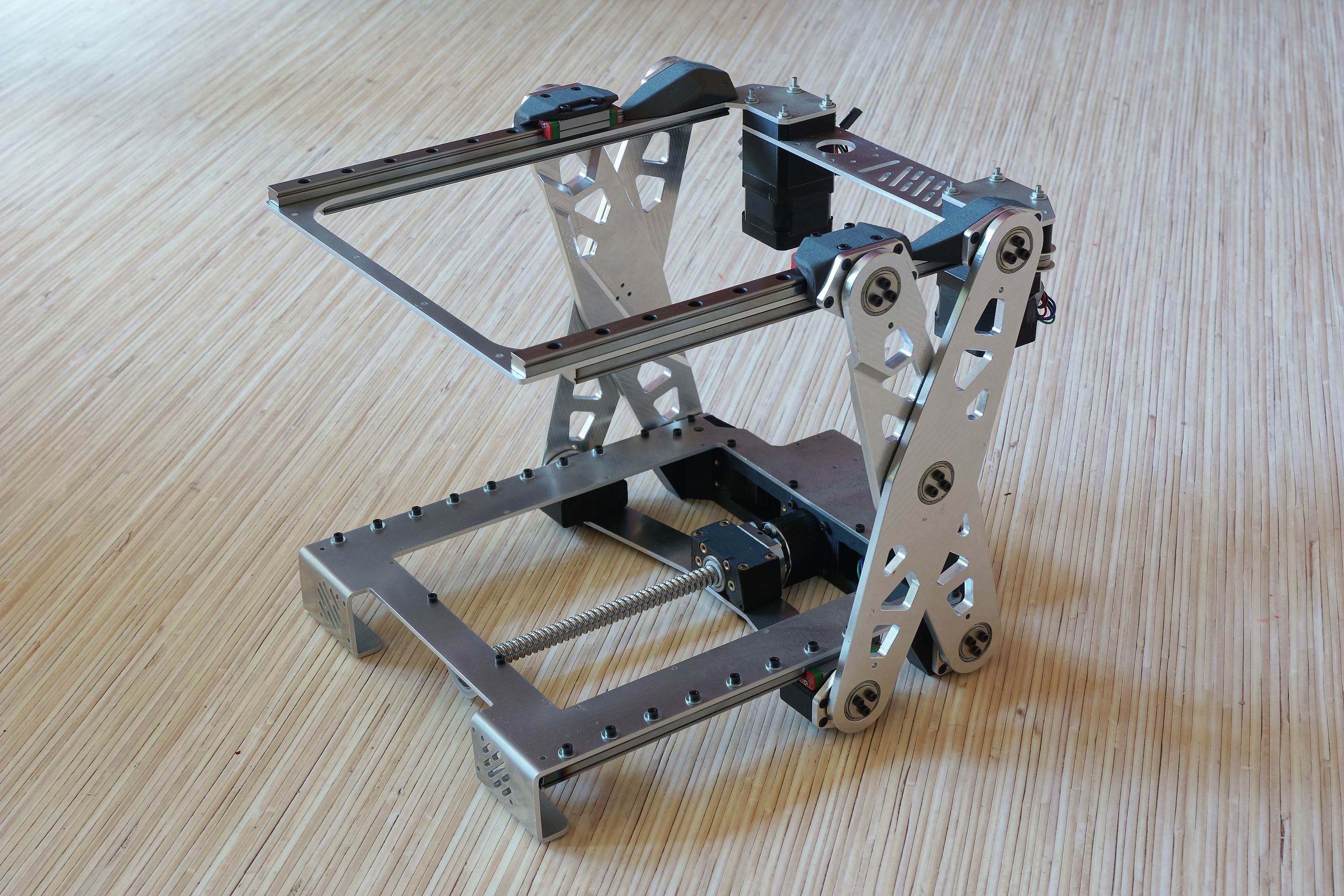
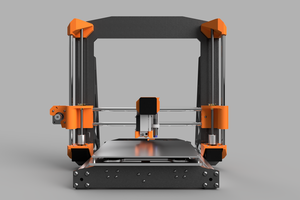
Malte SchraderAs you can see in the renderings, the printer will unfold during printing. The printer will be built out of CNC machined aluminum parts and 3d printed ones.
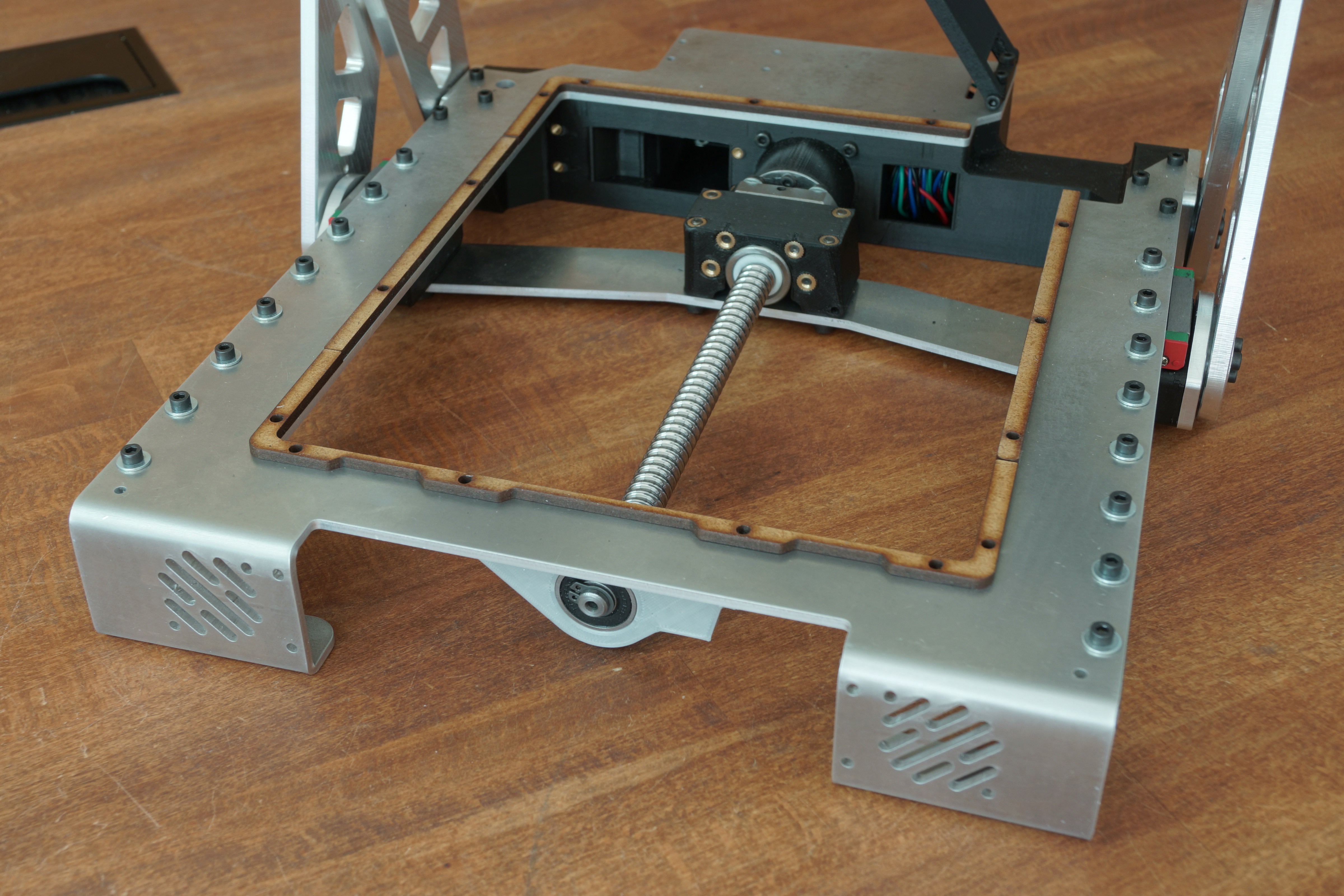
I chose aluminum in the first place because I wanted to build the printer as rigid as possible (proof of concept).
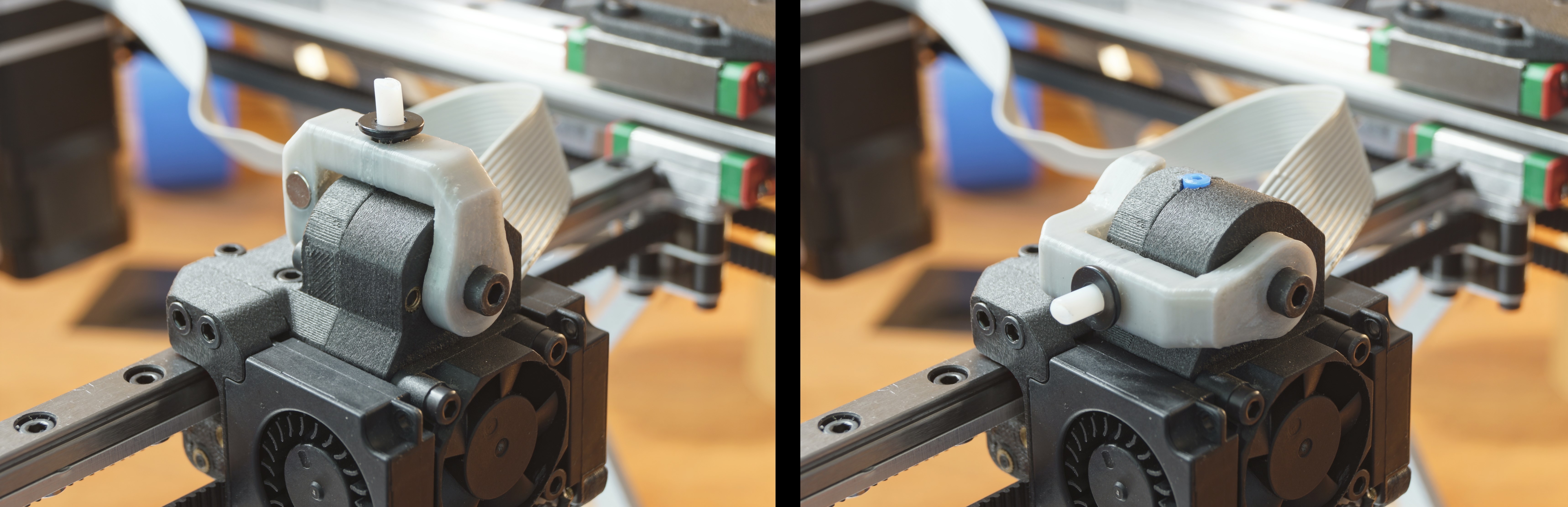
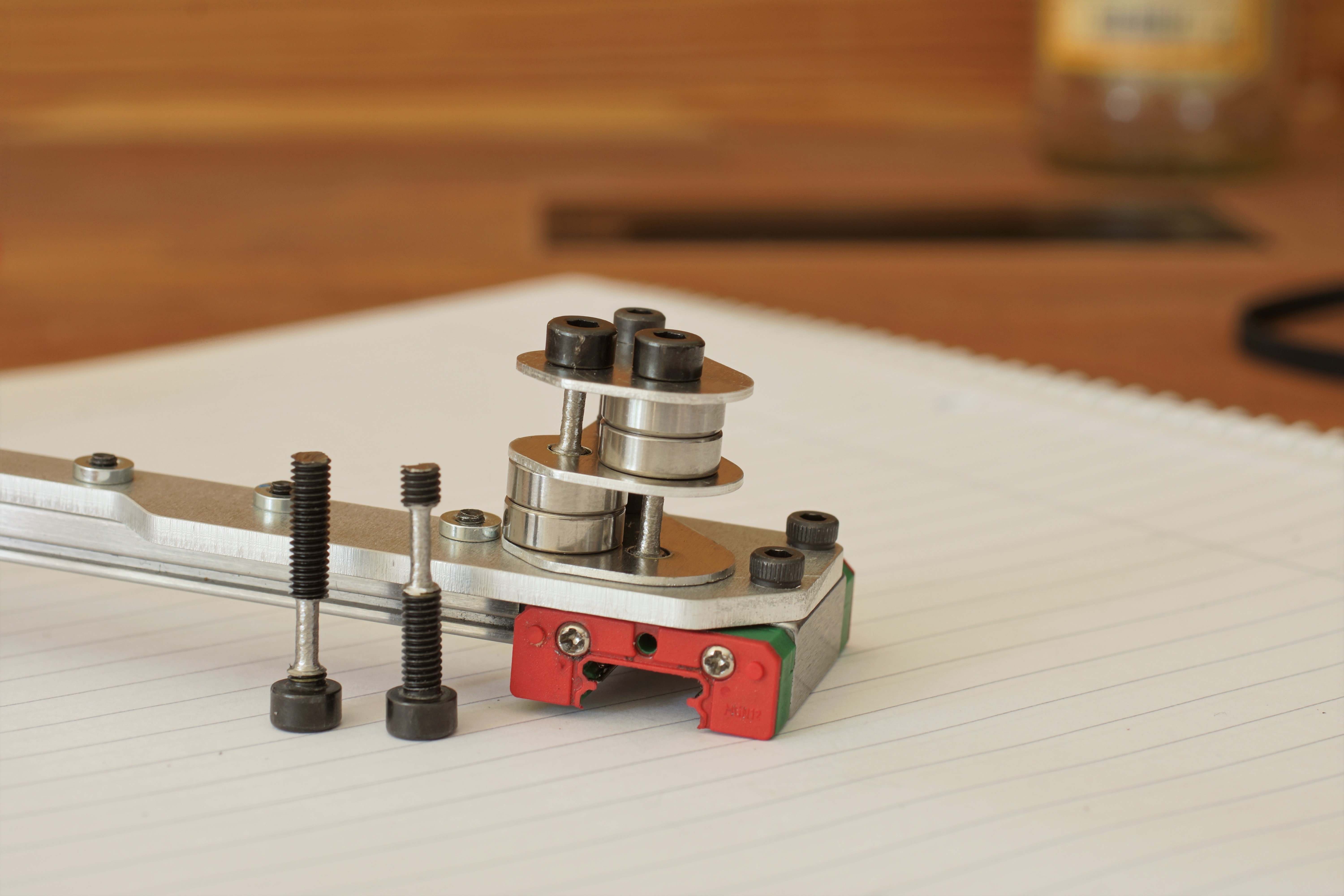
To obtain rigid joints, the printer uses a combination of axial and radial bearings. Three screws then preload each axial friction bearing.
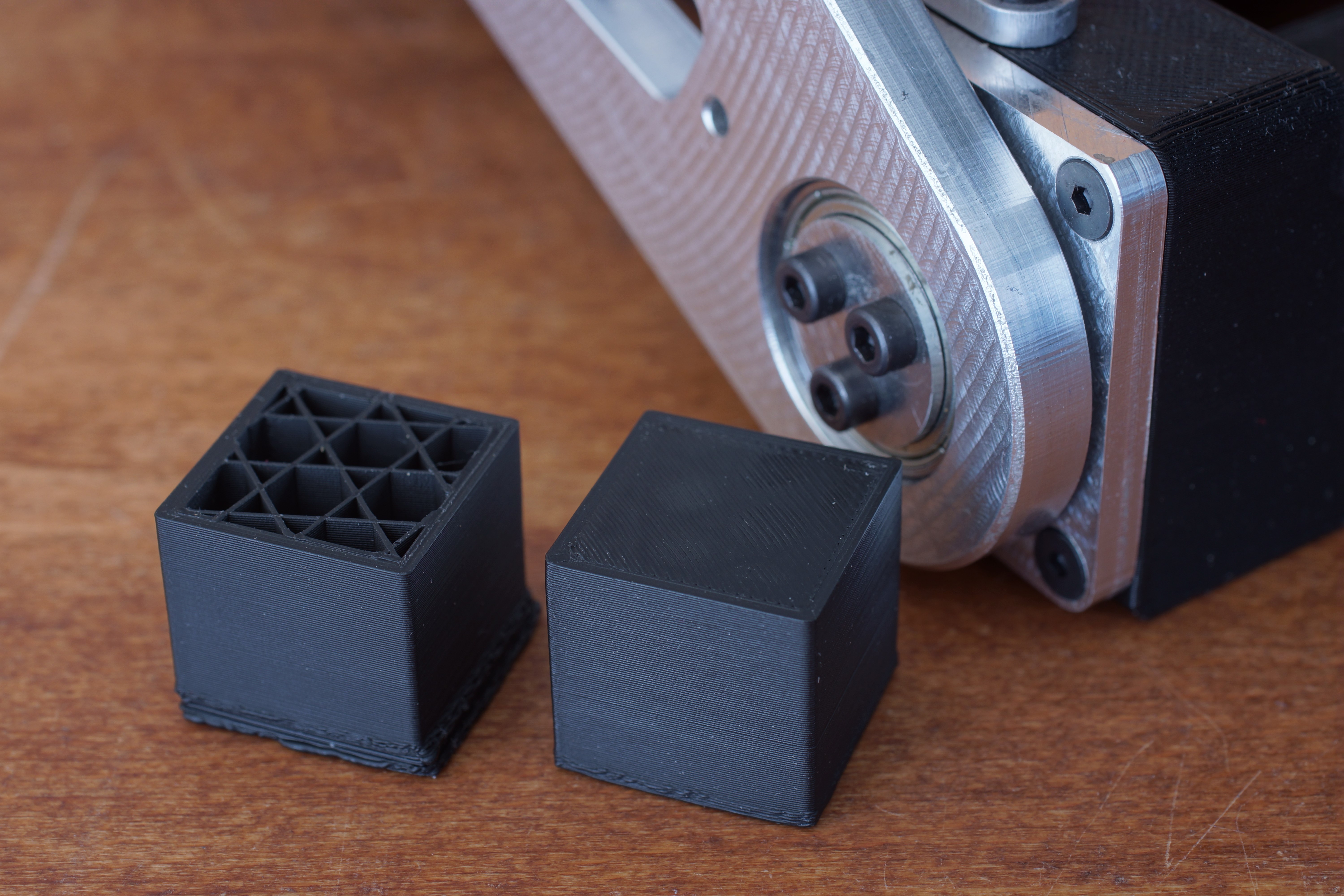
 For the first build, the friction bearings will glide directly on the aluminum. Later I want the aluminum parts to be hard anodized (for a better friction coefficient and to expand the lifetime of the friction bearings).
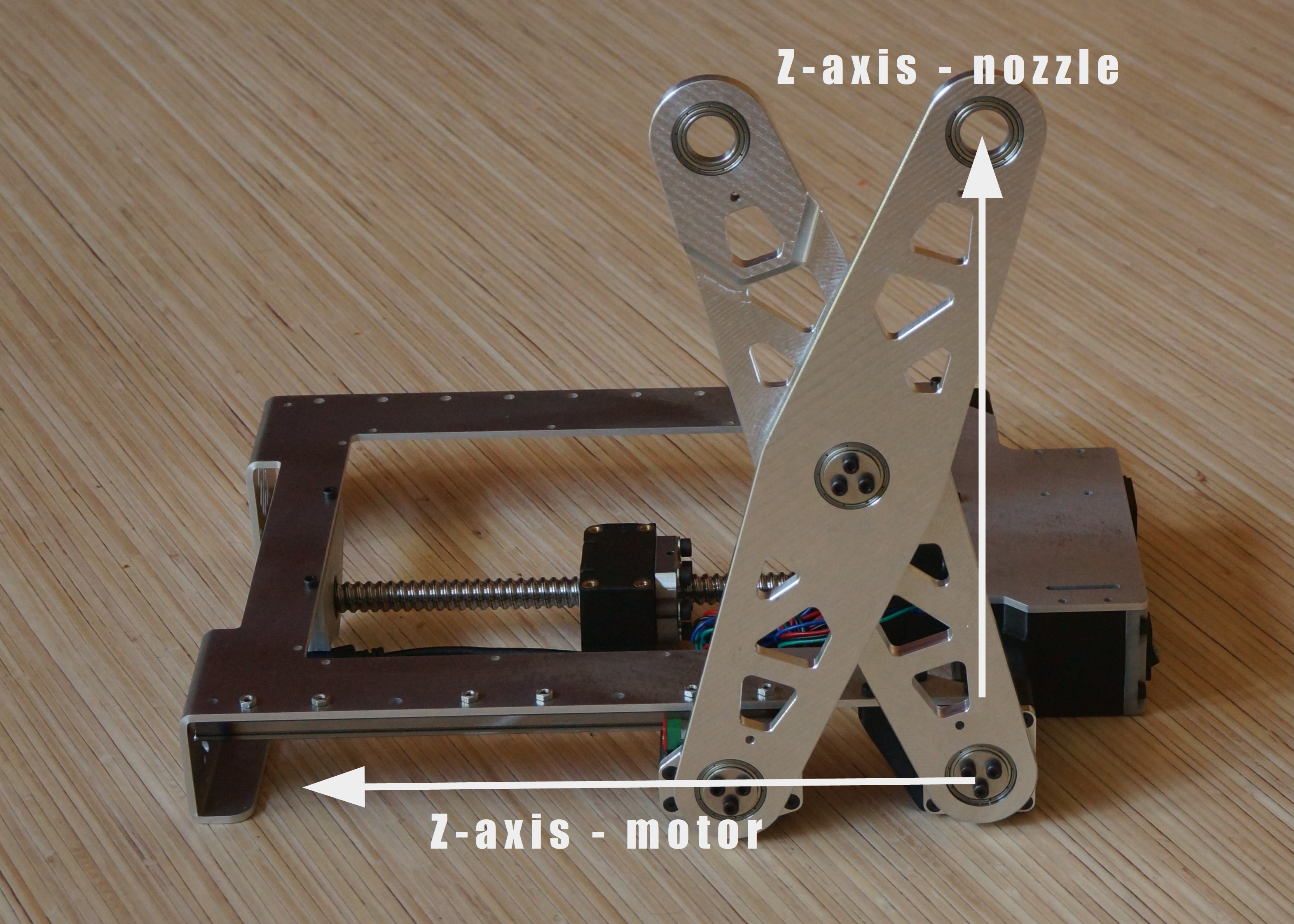
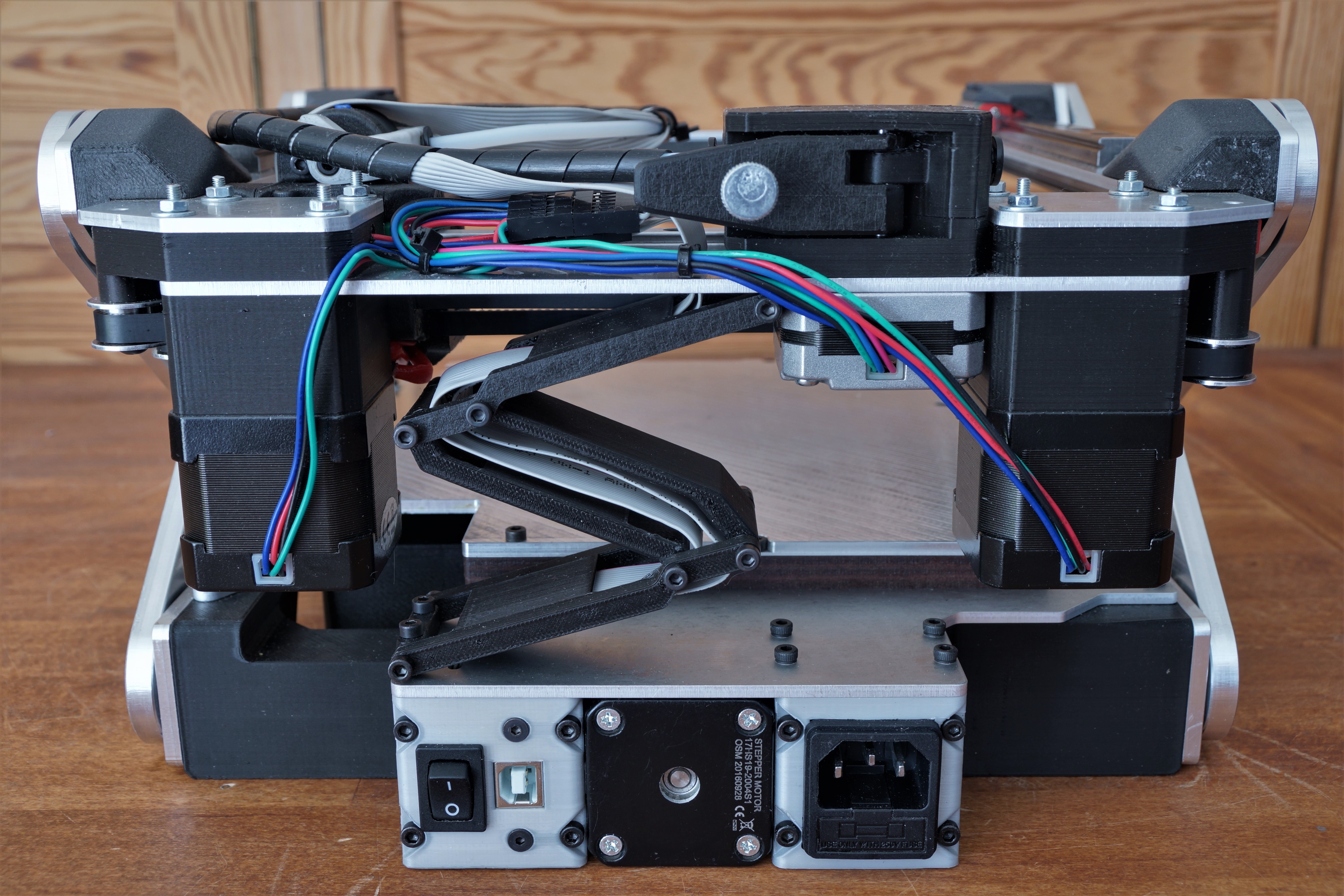
For the first build, the friction bearings will glide directly on the aluminum. Later I want the aluminum parts to be hard anodized (for a better friction coefficient and to expand the lifetime of the friction bearings).Due to the different Z-axis construction, the movement of the Z-motor is not linear to the Z-axis movement of the nozzle. When the printer is in the folded position, the Z-axis has a gear ratio of 1/4 to the printhead's Z-axis, which can cause several problems. The Z-motor has to be powerful enough to lift the upper structure, and the whole construction needs to be highly precise.
Technical challenge:
Because of the non-linear Z-axis I can't use the stock Marlin 2 firmware. A simple function can describe the dependency between the printhead's Z-axis and the real one (Pythagorean theorem). My problem is that I don't know how and where to add this dependency to the firmware.
Update: This problem has been solved. I added the formula for the non-linear Z-axis to the firmware.
Future plans:
After the first build, I want to try to replace as many Aluminium parts as possible with 3d printed ones to reduce the weight and to make the printer more RepRap friendly.
_
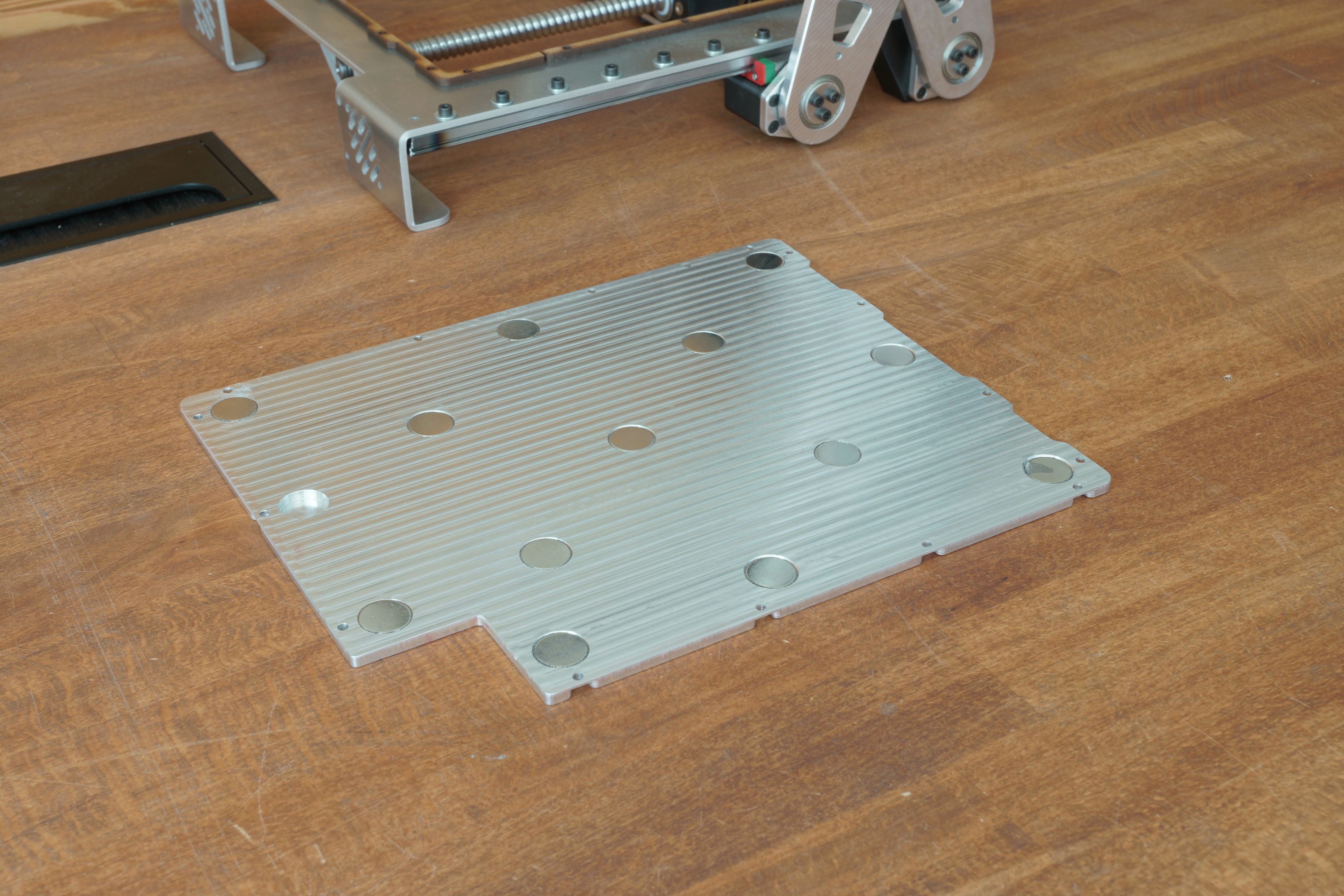
I designed the 3D printer in Fusion360 and I will publish everything under an open-source license after I finished the first build.
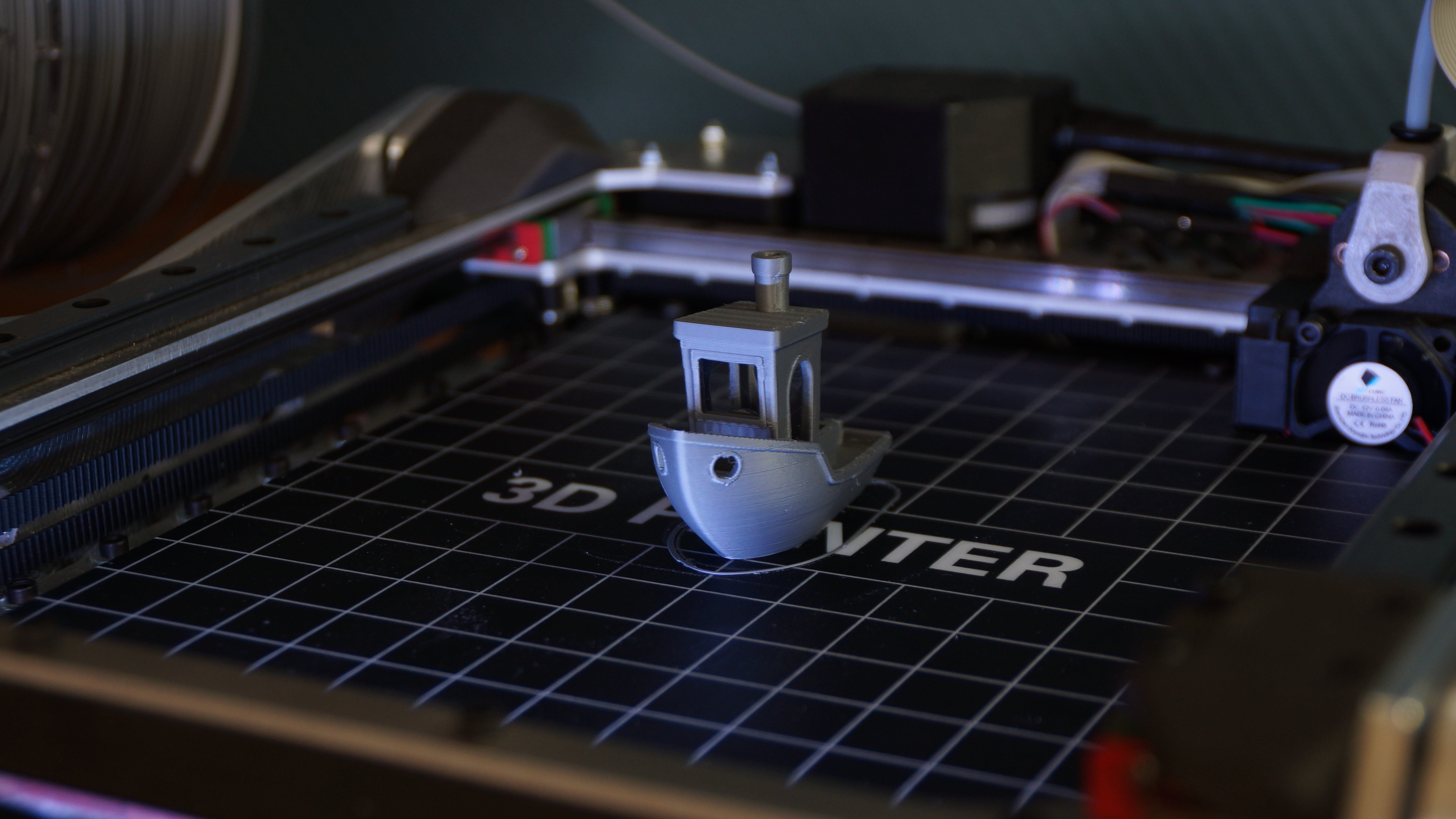 Layerheight: 0.2mm, print time: 78 minutes
Layerheight: 0.2mm, print time: 78 minutes


















 Luke Brandon
Luke Brandon
 heinz
heinz
 the.wretch
the.wretch
marlin2.0的Z轴怎么修改,可有人知道??不想用1.0。