 Kristjan Berce
Kristjan BerceAfter thorough consideration it became clear that development kit is the best purpose for this project. This means that people can simply download 3d files, gather electronics and start building on from code that is already written. It is a great way to learn about human motion, PID regulators, motors, robotics and if nothing else tickles your engineering sense, it makes you feel a bit like Iron Man.
Other possible usages:
- Development kit
- Rehabilitation (motor could counter your movement with predetermined force)
- Help with lifting (I received many mails from people who were in an accident and could hardly move their forearm. In that case, muscle sensors could be a good answer)
- Starter kit for newcomers to electronics and engineering
- And much more..
About this project:
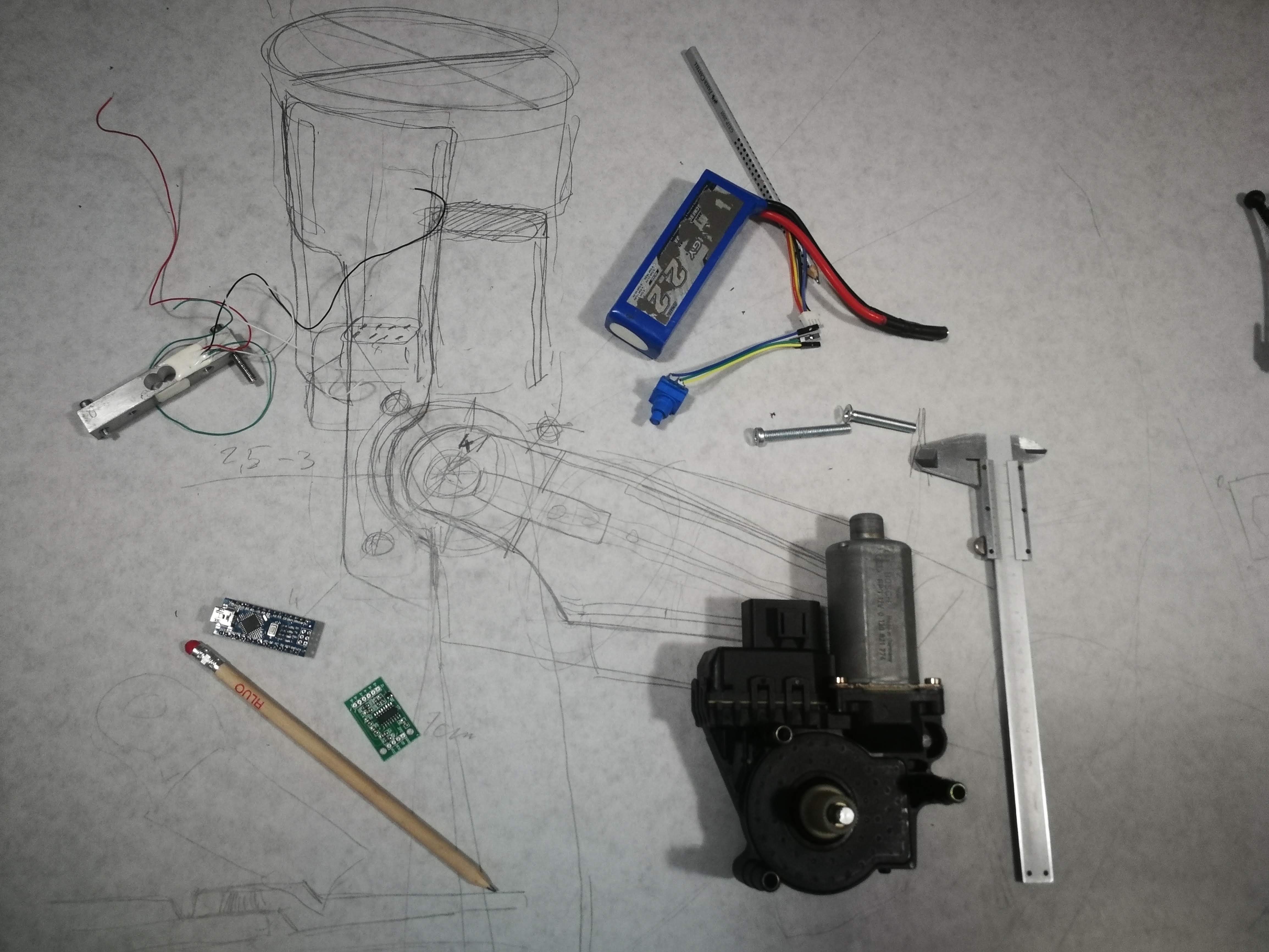
Due to lack of time for proper development (the project was placed in motion a month ago) we allocated 80% of our time on 3D modelling, design and finding purpose. Other 20% was used for code and electronics.
Because of our low budget we had to resort to some interesting measures. As buying a electric motor specifically design for this use-case was too expensive and out of the question we had to be resourceful. We used an old windshield motor from a car as it was cheap and did the job just fine. It does have it's drawbacks tho as it is a bit big.
As this is just the first prototype version and is not finished in any way we noticed quite a few use-case scenarios for further development. Exoskeleton arm could be used as workplace tool helping physical workers with tedious repeating workplace tasks which can lead to workplace related injuries.
It could be also used as a rehabilitation tool which would help people with arm injuries (muscle and nerve damage). It would help them with moving the arm in a pre-determined, correct pattern.
Last use-case that we noticed and focused on is of more educational nature. During the project we have learned a lot about electronics, cad modelling, ergonomics and other interesting fields. We think that creating a working prototype was a fun and interesting experience. Being open-source we intend to share blueprints so other people could learn and have the same fun we had while designing their own version of our idea.
Had we started few months ago or what our future plans would be:
- Make the exo-arm fully modular. For example, now it can only fit an adult
- Find even smaller and lighter motor
- Pack all the electronics in a single PCB to save space and make it look better.
- Come up with a decent control algorithm.
- Add muscle sensors to biceps and forearm. It might help with point 4.
- Add endpoint switches that disconnect power from motor in case something goes wrong.
- Further development of cad model. Optimizing thickness, adding additional ribs for strength and making it look better.
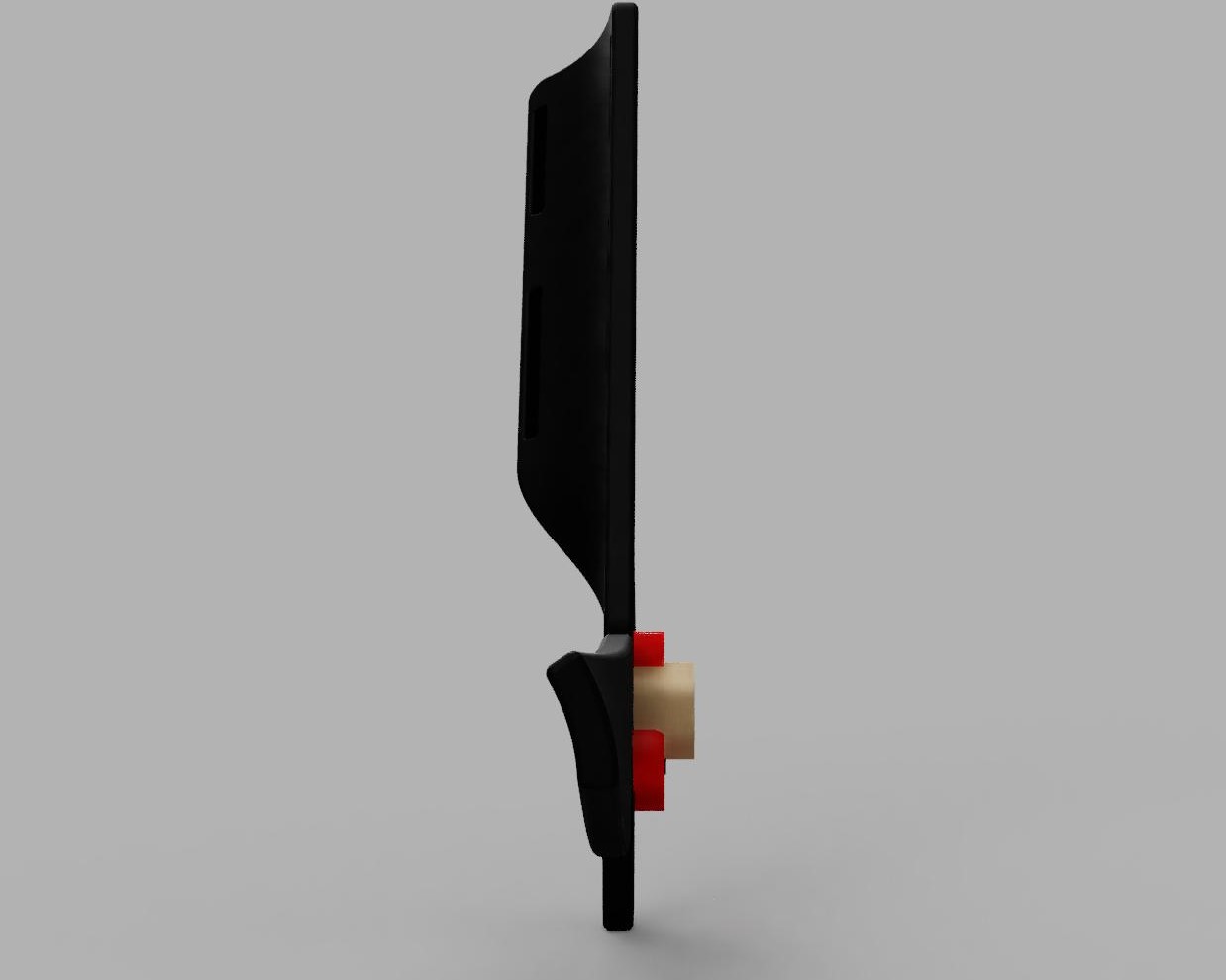
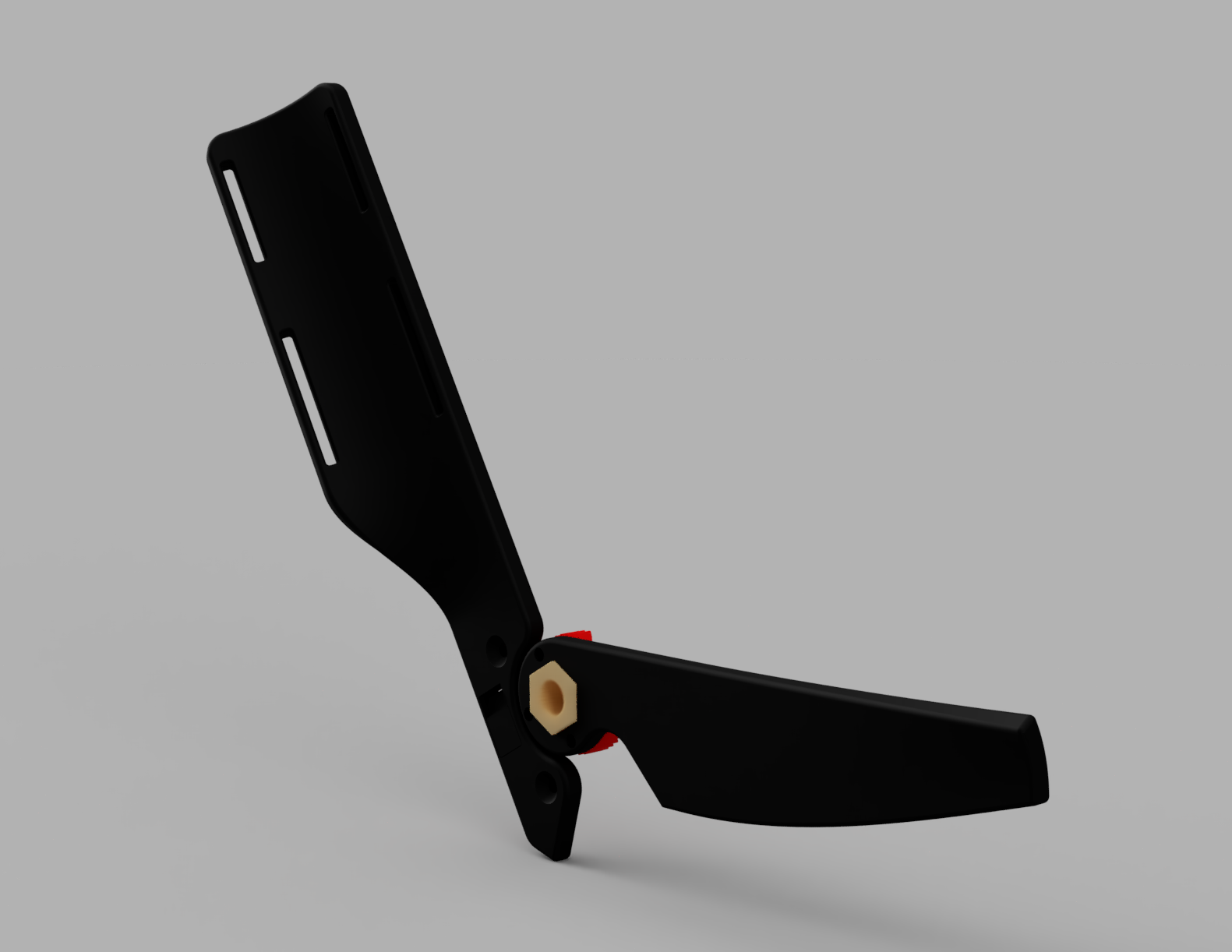
The first version of the exoskeleton arm (2017 project) was made from aluminum, wood and things I found lying around garage. This year, I decided to implement the latest trend, 3D printing. It's much more customizable, scalable and alltogether better.
The windshield wiper motor that I used on previous version is now replaced with car window motor, because It's smaller, little lighter and has less torque.
Hardware, such as electronics and sensors is the same, because I still think it's the best option. Especially if I want to keep the costs low.
Code is also more or less the same, with minor fixes and upgrades. Check the project logs for extended explanation.




 Brian Brocken
Brian Brocken
 Sam Baker
Sam Baker
 Tobias
Tobias
 Maximiliano Palay
Maximiliano Palay
Working on similar project... love to hear your thoughts or comments. http://darkrubymoon.blogspot.com/2021/10/amped-assistive-muscle-powered.html